[解疑]图像、矩阵的二维空间变换
本文经过参考多个文章整理而成,感谢各位博主的无私分享。
综述
图像(2维平面)到图像(2维平面)的四种变换包括:等距变换,相似变换,仿射变换,投影变换。对图像的几何变换本质上是一种线性变换,其数学本质为 I n e w = T I o l d I_{new}=T{I_{old}} Inew=TIold,即通过变换矩阵 T T T将原图上的点的位置 I o l d I_{old} Iold 变换到新的位置,从而得到新的图像 I n e w I_{new} Inew。
执行一般的二维空间变换包括如下三步:
- 定义空间变换的参数;
- 创建变换结构体TFORM,它定义了你所要执行变换的类型;
TFORM结构体包含了执行变换需要的所有参数。你可以定义很多类型的空间变换,包括仿射变换affine transformations(如平移translation,缩放scaling,旋转rotation,剪切shearing)、投影变换projective transformations和自定义的变换custom transformations。
创建结构体的方法有两种:使用maketform或者使用cp2tform。 - 执行变换。
通过将要变换的图像和TFORM结构体传递给imtransform函数即可实现变换。
![[解疑]图像、矩阵的二维空间变换_第1张图片](http://img.e-com-net.com/image/info8/7f3ab0740cf542b8974150ed386bdbb8.jpg)
2D平面变换示意图
- Translation 平移
- Euclidean(rigid, rotation) 旋转
- Scale 缩放;图中没有画出
- Similarity 相似变换;结合旋转,平移和缩放
- Affine 仿射变换;想象在similarity的基础上用两只手对图像进行按压拉伸
- Projective 投影变换;想象投影仪做的事情,将一个面投影到另外一个面的情况
eometry Transformation 几何变换
Homogeneous coordinate 齐次坐标:使用N+1维坐标来表示N维坐标,例如在2D笛卡尔坐标系中加上额外变量w来形成2D齐次坐标系。齐次坐标具有规模不变性,同一点可以被无数个齐次坐标表达. 齐次坐标转化为笛卡尔坐标可以通过同除最后一项得到。
仿射变换
原理
仿射变换其实是另外两种简单变换的叠加:一个是线性变换,一个是平移变换。统一平移变换和线性变换的一种变换我们起了个名字叫“仿射变换”。这个新的变换就不再单纯的是两个线性空间的映射了,而是变成了两个仿射空间的映射关系。为了更好地理解仿射变换,首先就要知道线性变换以及它的不足。在未说明的情况下,下面使用的是卡迪尔坐标系。
所谓线性变换是指两个线性空间的映射,一个变换 L : A → B {\mathcal{L}:\mathcal{A}\to\mathcal{B}} L:A→B是线性变换,必须满足两个条件,也就是我们经常说的线性条件:
- L ( u + v ) = L ( u ) + L ( v ) L(u+v)=L(u)+L(v) L(u+v)=L(u)+L(v) additivity
- L ( α u ) = α L ( u ) {L({\alpha}u)={\alpha}L(u)} L(αu)=αL(u) homogeneity
举个例子说明一下。假设 L L L是一个二维绕原点旋转变换, u u u和 v v v是旋转角度。我们知道“一次性旋转 u + v u+v u+v度”和“先旋转 u u u度再旋转 v v v读”达到的效果是一样的;同样地,“一次性旋转 α u {\alpha}u αu度”和“旋转 α \alpha α次 u u u度”也是一样的。
线性变换可以用矩阵来表示。假设 p = ( x , y ) T p=(x,y)^{T} p=(x,y)T是二维空间中的点, T T T是一线性变换,那么存在一个矩阵 A A A,使得 p ′ = ( x ′ , y ′ ) T = T ( p ) = A p p'=(x',y')^{T}=T(p)=Ap p′=(x′,y′)T=T(p)=Ap。上面的旋转变换 R R R,以及缩放 S S S变换都有相应的变换矩阵
[ x ′ y ′ ] = R ( p ) = [ c o s ( θ ) − s i n ( θ ) s i n ( θ ) c o s ( θ ) ] [ x y ] \left[ {\begin{array}{c} x'\\y'\\ \end{array}} \right]=R(p)= \left[ {\begin{array}{cc} cos(\theta) & -sin(\theta) \\ sin(\theta) & cos(\theta) \\ \end{array} } \right] \left[ {\begin{array}{cc} x \\ y \\ \end{array} } \right] [x′y′]=R(p)=[cos(θ)sin(θ)−sin(θ)cos(θ)][xy]
[ x ′ y ′ ] = S ( p ) = [ S x 0 0 S y ] [ x y ] \left[ {\begin{array}{c} x'\\y'\\ \end{array}} \right]=S(p)= \left[ {\begin{array}{cc} S_x & 0 \\ 0 & S_y \\ \end{array} } \right] \left[ {\begin{array}{c} x \\ y \\ \end{array} } \right] [x′y′]=S(p)=[Sx00Sy][xy]
但是在笛卡尔坐标系中,平移变换却不能用矩阵来表示。一个平移变换 T T T具有如下的形式
[ x ′ y ′ ] = T ( p ) = I [ x y ] + [ t x t y ] \left[ {\begin{array}{c} x'\\y'\\ \end{array}} \right]=T(p)= I \left[ {\begin{array}{cc} x \\ y \\ \end{array} } \right]+\left[ {\begin{array}{c} t_x \\ t_y \\ \end{array} } \right] [x′y′]=T(p)=I[xy]+[txty]
我们可以很容易地验证,平移变换 T T T是不能写成两个矩阵乘积形式的。使用齐次坐标系很好的解决了这个问题(可能还有其它的原因)。齐次坐标系统其实是用高维坐标来表示一个低维的点,就好比我们用 ( x , 1 ) (x,1) (x,1)来表示一个长度值一样,其实用一个 x x x就可以了,但是用高一维的表示,在有的时候会带来便利。一个N维的卡迪尔坐标系中的一个点 p = ( x 1 , x 2 , . . . , x N ) p=(x_1,x_2,...,x_N) p=(x1,x2,...,xN),在齐次坐标系中有无数的 N + 1 N+1 N+1维点与之对应,这些点可以描述为 p H = ( ω x 1 , ω x 2 , . . . , ω x N , ω ) p_H=(\omega x_1,\omega x_2,...,\omega x_N,\omega) pH=(ωx1,ωx2,...,ωxN,ω), ω \omega ω取不同的值,我们变得到齐次坐标系中不同的点。当把这些点映射到 ω = 1 \omega=1 ω=1平面(不改变 x i x_i xi之间比例),我们又降维得到对应的卡迪尔坐标系中的点。在OpenGL中我们是用 ( x , y , z , 1 ) ( ω = 1 ) (x,y,z,1)(\omega=1) (x,y,z,1)(ω=1)来表示一点三维的点,显然这个点与卡迪尔坐标系中的点 ( x , y , z ) (x,y,z) (x,y,z)是一一对应的。在计算的过程中,会出现第四个分量不为 ω ≠ 1 \omega \neq 1 ω=1的情况,这时我们也总是同除以 ω \omega ω使齐次坐标正规化。
![[解疑]图像、矩阵的二维空间变换_第2张图片](http://img.e-com-net.com/image/info8/2ce17455891f49848a56bc70d42206a8.jpg)
现在回来让我们看看使用齐次坐标时,对应的线性变换是什么形式。假设 p = ( x , y , 1 ) T p=(x,y,1)^{T} p=(x,y,1)T是二维点对应的齐次坐标,与上面使用卡迪尔坐标系类似,我们可以得到相应的线性变换如旋转变换 R R R和缩放变换 S S S的矩阵表示:
[ x ′ y ′ 1 ] = R ( p ) = [ c o s ( θ ) − s i n ( θ ) 0 s i n ( θ ) c o s ( θ ) 0 0 0 1 ] [ x y 1 ] \left[ {\begin{array}{c} x'\\y'\\1\\ \end{array}} \right]=R(p)= \left[ {\begin{array}{ccc} cos(\theta) & -sin(\theta) & 0 \\ sin(\theta) & cos(\theta) & 0 \\ 0 & 0 & 1\\\end{array} } \right] \left[ {\begin{array}{c} x \\ y \\ 1 \\ \end{array} } \right] ⎣⎡x′y′1⎦⎤=R(p)=⎣⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0001⎦⎤⎣⎡xy1⎦⎤
[ x ′ y ′ 1 ] = S ( p ) = [ S x 0 0 0 S y 0 0 0 1 ] [ x y 1 ] \left[ {\begin{array}{c} x'\\y'\\1\\ \end{array}} \right]=S(p)= \left[ {\begin{array}{ccc} S_x & 0 & 0 \\ 0 & S_y & 0 \\ 0 & 0 & 1\\ \end{array} } \right] \left[ {\begin{array}{c} x \\ y \\ 1 \\ \end{array} } \right] ⎣⎡x′y′1⎦⎤=S(p)=⎣⎡Sx000Sy0001⎦⎤⎣⎡xy1⎦⎤
容易验证, ( x ′ , y ′ ) (x', y') (x′,y′)的值并没有变化。但是使用齐次坐标后,平移操作便也可以使用矩阵来表示了(如下),平移量出现在变换矩阵的最右侧。
[ x ′ y ′ 1 ] = T ( p ) = [ 1 0 t x 0 1 t y 0 0 1 ] [ x y 1 ] \left[ {\begin{array}{c} x'\\y'\\1\\ \end{array}} \right]=T(p)= \left[ {\begin{array}{ccc} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1\\ \end{array} } \right] \left[ {\begin{array}{c} x \\ y \\ 1 \\ \end{array} } \right] ⎣⎡x′y′1⎦⎤=T(p)=⎣⎡100010txty1⎦⎤⎣⎡xy1⎦⎤
最后,我们给出仿射变换稍微正式点的定义。一个仿射变换 T T T,可以表示成一个线性变换 A A A后平移 t t t: T ( p ) = A p + t T(p)=Ap+t T(p)=Ap+t,其中 p p p是待变换的点齐次坐标表示。 T T T可以表示成如下的形式:
T = [ a 11 a 12 a 13 t 1 a 21 a 22 a 23 t 2 a 31 a 32 a 33 t 3 0 0 0 1 ] \bf{T}=\left[ {\begin{array}{cccc} a_{11}&a_{12}&a_{13}&t_1\\ a_{21}&a_{22}&a_{23}&t_2\\ a_{31}&a_{32}&a_{33}&t_3\\ 0&0&0&1\\ \end{array}} \right] T=⎣⎢⎢⎡a11a21a310a12a22a320a13a23a330t1t2t31⎦⎥⎥⎤
其中, A = [ a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 ] \bf{A}=\left[ {\begin{array}{ccc} a_{11}&a_{12}&a_{13}\\ a_{21}&a_{22}&a_{23}\\ a_{31}&a_{32}&a_{33}\\ \end{array}} \right] A=⎣⎡a11a21a31a12a22a32a13a23a33⎦⎤表示线性变换; t = [ t 1 t 2 t 3 ] \bf{t}=\left[ {\begin{array}{c} t_1\\ t_2\\ t_3\\ \end{array}} \right] t=⎣⎡t1t2t3⎦⎤表示平移变换;右下角的数字可以进行整体缩放,当为1时,表示不进行整体缩放。
可以知道:仿射变换保持了二维图形的“平直性”和“平行性”。仿射变换可以通过一系列的变换的复合来实现,包括平移,缩放,翻转,旋转和剪切。
warpAffine
opencv中相应的函数是:
void warpAffine(InputArray src, OutputArray dst, InputArray M, Size dsize, int flags=INTER_LINEAR, int borderMode=BORDER_CONSTANT, const Scalar& borderValue=Scalar())
Parameters:
- src – input image.
- dst – output image that has the size dsize and the same type as src .
- M – transformation matrix,本文中着重讲M的构造
- dsize – size of the output image.ansformation ().
- borderMode – pixel extrapolation method (see borderInterpolate()); when borderMode=BORDER_TRANSPARENT , it means that the pixels in the destination image corresponding to the “outliers” in the source image are not modified by the function.
- borderValue – value used in case of a constant border; by default, it is 0.
典型的变换矩阵
- 平移,将每一点移到到 ( x + t , y + t ) (x+t , y+t) (x+t,y+t),变换矩阵为

- 缩放变换 将每一点的横坐标放大或缩小 s x s_x sx倍,纵坐标放大(缩小)到 s y s_y sy倍,变换矩阵为
[ S x 0 0 0 S y 0 0 0 1 ] \left[ {\begin{array}{ccc} S_x & 0 & 0 \\ 0 & S_y & 0 \\ 0 & 0 & 1\\ \end{array} } \right] ⎣⎡Sx000Sy0001⎦⎤ - 旋转变换原点:目标图形围绕原点顺时针旋转 θ \theta θ弧度,变换矩阵为
- 旋转变换 :目标图形以 ( x , y ) (x , y) (x,y)为轴心顺时针旋转 θ \theta θ弧度,变换矩阵为

相当于两次平移与一次原点旋转变换的复合,即先将轴心 ( x , y ) (x,y) (x,y)移到到原点,然后做旋转变换,最后将图片的左上角置为图片的原点,即

在opencv的图像处理中,所有对图像的处理都是从原点进行的,而图像的原点默认为图像的左上角,而我们对图像作旋转处理时一般以图像的中点为轴心。
getRotationMatrix2D
可以使用opencv中自带的Mat getRotationMatrix2D(Point2f center, double angle, double scale)函数获得变换矩阵M,
- center:旋转中心
- angle:旋转弧度,一定要将角度转换成弧度
- scale:缩放尺度
它得到的矩阵是:
(顺时针)
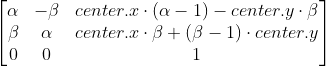
(逆时针)
其中 α = s c a l e ∗ c o s ( a n g l e ) , β = s c a l e ∗ s i n ( a n g l e ) , ( c e n t e r . x , c e n t e r . y ) α = scale * cos(angle) , β = scale * sin(angle) , (center.x , center.y) α=scale∗cos(angle),β=scale∗sin(angle),(center.x,center.y) 表示旋转轴心。
getAffineTransform
opencv中还有一个函数:Mat getAffineTransform(InputArray src, InputArray dst)
它通过三组点对就可以获得它们之间的仿射变换,如果我们在一组图像变换中知道变换后的三组点,那么我们就可以利用该函数求得变换矩阵,然后对整张图片进行仿射变换。
仿射变换之所以重要,另一个重要的原因是仿射变换后不改变点的共线/共面性,而且还保持比例,这对图形系统尤其重要。例如,根据这个性质,如果我们要变换一个三角形,只需要对三个定点 v 1 v1 v1, v 2 v2 v2, v 3 v3 v3进行变换T就可以了,对于原先边 v 1 v 2 v1v2 v1v2上的点,变换后一定还在边后 T ( v 1 ) T ( v 2 ) T(v1)T(v2) T(v1)T(v2)上。
总结一下,仿射变换是线性变换后进行平移变换(其实也是齐次空间的线性变换),使用齐次坐标使得仿射变换可以以统一的矩阵形式进行表示。
透视变换
还有一种与仿射变换经常混淆的变换为透视变换,透视变换需要四组点对才能确定变换矩阵,由于仿射变换保持“平直性”与“平行性”,因此只需要三组点对,而透视变换没有这种约束,故需要四组点对。
原理
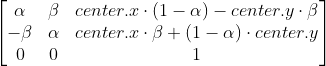
透视变换(Perspective Transformation)是将图片投影到一个新的视平面(Viewing Plane),也称作投影映射(Projective Mapping)。通用的变换公式为:
u u u, v v v是原始图片左边,对应得到变换后的图片坐标 x x x, y y y,其中![]()
。
变换矩阵 可以拆成4部分,
可以拆成4部分, 表示线性变换,比如scaling,shearing和ratotion。
表示线性变换,比如scaling,shearing和ratotion。![]() 用于平移,
用于平移,![]() 产生透视变换。所以可以理解成仿射等是透视变换的特殊形式。经过透视变换之后的图片通常不是平行四边形(除非映射视平面和原来平面平行的情况)。
产生透视变换。所以可以理解成仿射等是透视变换的特殊形式。经过透视变换之后的图片通常不是平行四边形(除非映射视平面和原来平面平行的情况)。
重写之前的变换公式可以得到:
![[解疑]图像、矩阵的二维空间变换_第3张图片](http://img.e-com-net.com/image/info8/c4b6857ffb6346049ed336369e2348c8.png)
所以,已知变换对应的几个点就可以求取变换公式。反之,特定的变换公式也能新的变换后的图片。简单的看一个正方形到四边形的变换:
变换的4组对应点可以表示成:![]()
根据变换公式得到:![[解疑]图像、矩阵的二维空间变换_第4张图片](http://img.e-com-net.com/image/info8/a2cb3174d3444ab585acd37ada58d7dc.png)
定义几个辅助变量:
![]() 都为0时变换平面与原来是平行的,可以得到:
都为0时变换平面与原来是平行的,可以得到:![[解疑]图像、矩阵的二维空间变换_第5张图片](http://img.e-com-net.com/image/info8/4233fc83a4ab4888911dace67fc1e0eb.png)
![]() 不为0时,得到:
不为0时,得到:![[解疑]图像、矩阵的二维空间变换_第6张图片](http://img.e-com-net.com/image/info8/25c0896b6f68419a81fccfc57ad247c5.png)
求解出的变换矩阵就可以将一个正方形变换到四边形。反之,四边形变换到正方形也是一样的。于是,我们通过两次变换:四边形变换到正方形+正方形变换到四边形就可以将任意一个四边形变换到另一个四边形。
![[解疑]图像、矩阵的二维空间变换_第7张图片](http://img.e-com-net.com/image/info8/dc5bb169ddca4fdfa5c525efb599bf3d.jpg)
warpPerspective
主要作用:对图像进行透视变换,就是变形。
C++: void warpPerspective(InputArray src, OutputArray dst, InputArray M, Size dsize, int flags=INTER_LINEAR, int borderMode=BORDER_CONSTANT, const Scalar& borderValue=Scalar())
参数详解:
- InputArray src:输入的图像
- OutputArray dst:输出的图像
- InputArray M:透视变换的矩阵
- Size dsize:输出图像的大小
- int flags=INTER_LINEAR:输出图像的插值方法,
combination of interpolation methods (INTER_LINEAR or INTER_NEAREST) and the optional flagWARP_INVERSE_MAP, that sets M as the inverse transformation ( \texttt{dst}\rightarrow\texttt{src} ) - int borderMode=BORDER_CONSTANT:图像边界的处理方式
- const Scalar& borderValue=Scalar():边界的颜色设置,一般默认是0
参考
图像的变换
https://blog.csdn.net/liangjiubujiu/article/details/80424287
仿射变换与齐次坐标
https://blog.csdn.net/liangjiubujiu/article/details/80628506
仿射变换矩阵
https://blog.csdn.net/liangjiubujiu/article/details/80918428
matlab 二维空间变换
https://blog.csdn.net/liangjiubujiu/article/details/80607161
图像投影/单应性变换/直射
https://blog.csdn.net/liangjiubujiu/article/details/80412175
图像的等距变换,相似变换,仿射变换,射影变换及其matlab实现
https://blog.csdn.net/liangjiubujiu/article/details/80616870
仿射变换详解 warpAffine
https://blog.csdn.net/q123456789098/article/details/53330484
写于关雎
新浪微博:https://weibo.com/tianzhejia
CSDN博客:https://blog.csdn.net/qq_35605018
博客网站:http://www.zhijiadeboke.xyz
GitHub:https://github.com/ZhijiaTian
QQ邮箱:[email protected]
126邮箱:[email protected]
Outlook邮箱:[email protected]
以上均可与本人取得联系,欢迎探讨。^ v ^