YOLOv8代码上线!官方宣布将发布论文!附精度速度初探和对比总结
点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
点击进入—> 目标检测微信技术交流群
之前 CVer 第一时间分享了:YOLOv8来了!YOLOv5官方出品!这里再更新一下YOLOv8 的资源。
【YOLOv8 注意事项】
0. YOLOv8 的官方仓库和代码已上线,文档教程网址也刚刚更新。
1. YOLOv8 代码集成在 ultralytics 项目中,目前看不会再单独创建叫做 YOLOv8 的项目。
2. YOLOv8 即将有论文了!要知道 YOLOv5 自从 2020 年发布以来,一直是没有论文的。而 YOLOv8(YOLOv5团队)这次首次承认将先发布 arXiv 版本的论文(目前还在火速撰写中)。
YOLOv8 代码链接:https://github.com/ultralytics/ultralytics
权重链接:
https://github.com/ultralytics/assets/releases
YOLOv8 文档教程链接:
https://docs.ultralytics.com/
在CVer公众号后台回复:YOLOv8,即可下载YOLOv8源码、权重和教程
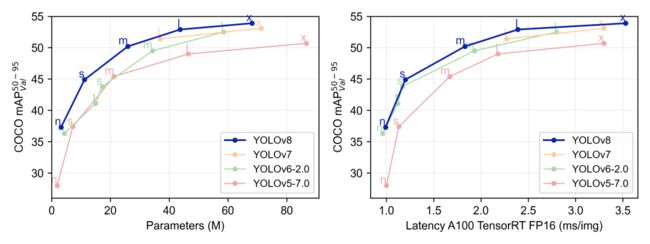
YOLOv8 官方放出了 YOLOv8 与 YOLOv7、YOLOv6 和 YOLOv5 的性能比较折线图,如下所示:
CVer 还发现了第三方(github作者:RangeKing )绘制的 YOLOv8 网络结构示意图,内容非常详细,还获得了 YOLOv8 官方的点赞认可,如下图所示
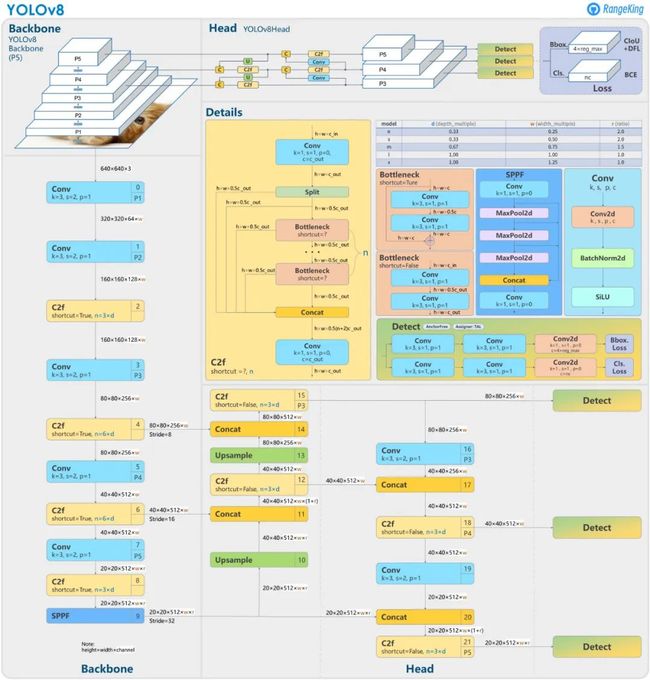
YOLOv8 网络结构示意图 | github作者:RangeKing
CVer 这里分享一篇关于【YOLOv8精度速度初探和对比总结】的知乎文章,内容写的也非常好,有一些独特的见解,希望对大家有所帮助。
作者:迪迦奥特曼
https://zhuanlan.zhihu.com/p/598077550
前几天已经传开了 YOLOv8 即将发布,昨天 ultralytics 终于宣布开源了YOLOv8。
https://github.com/ultralytics/ultralytics
repo没有起名为YOLOv8,也没有合并在YOLOv5里,有网友问作者回复说要搞自己的大框架集合,不只是YOLO不只是检测。此外作者还说在写arxiv论文了,最大的那个表格估计现在一页也放不下了。YOLOv8 代码风格完善了很多,精度更是高出一大截直奔SOTA,那么是否宣告 YOLOv5 即将像YOLOv1 v2一样慢慢成为历史?YOLOv5又 是如何一步步改到YOLOv8的(仅指ultralytics的YOLOv5到YOLOv8)?
其实之前本人已经写过两篇文章介绍各个YOLO【从百度飞桨YOLOSeries库看各个YOLO模型】和【YOLO内卷时期该如何选模型?】,如今YOLOv8发布了,也还是想再继续讨论下各个YOLO以及目前YOLO江湖诸神黄昏的现状。
差异点总结:
前几天已经有很多解读了,这里再简单总结下YOLOv8相比YOLOv5的改动:
(1). Backbone:CSP是不变的思想,但是 v8 中选用了 C2f 模块替换 v5 的 C3 模块,每个stage的blocks数也改为了[3,6,6,3]而不是[3,6,9,3],此外x版本的depth因子仍然为1.0和L版本一样而不是常规的1.33,明显是为了轻量化。stem卷积在v8里是k=3的卷积而不是k=6的了,而最后的SPPF模块v8还是照搬沿用v5的;
(2). Neck:除了同样是 C2f 模块替换 C3 模块外,v8还将v5中 PAN-FPN 的top down上采样阶段中的卷积直接删除了;
(3). Head:Decoupled-Head,和yolov6 ppyoloe的head类似,除了cls reg两个branch外还有一个projection conv,是为 DFL 用的,不同于v6 ppyoloe的是reg_max没有加1;
(4). Label Assign:v8终于还是使用了Anchor-Free,TaskAlignedAssigner(TAL)动态匹配的方式也是和v6 ppyoloe很相似的,但topk alpha参数略有不同,v8也没有ATSS静态匹配阶段;
(5). Loss:v8的分类loss还是使用的BCE,虽然也写了VFL(varifocal_loss)但是注释了没用上,回归loss是DFL Loss+CIoU Loss,loss_weight的设置也和v6 ppyoloe略有区别;
总的来看,最大的改动就是Anchor Base换成Anchor Free了,主要就是TOOD的思想,也参考了一些v6 ppyoloe的代码。
关于精度:
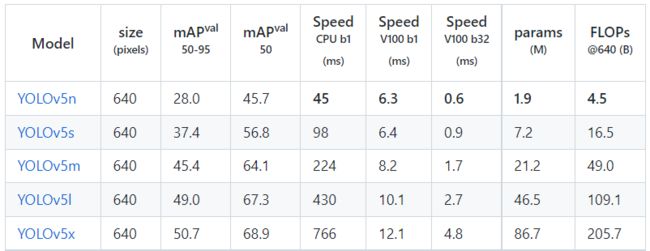
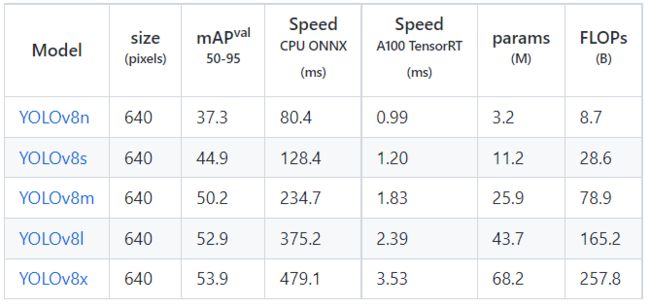
首先还是直接看下YOLOv5和YOLOv8的精度对比,可以看出同级别模型YOLOv8至少高出3个多点,nano版本更是高出9.3。参数量FLOPs上YOLOv8不可避免的增加了些,然后l x版本参数量少了点。
关于模型结构:
参数量FLOPs不可避免增加,n s m上已经有点明显了,但l x版本参数量反而减小了很多,我觉得主要还是减少了东西导致的,比如Backbone每个stage的输出的通道数只有 n/s 和YOLOv5的n/s相同,m/l/x 最后一个stage都缩减了很多,再配合最大的stage的blocks数也减少了,以及FPN去除了top-down上采样卷积,x版本的depth因子仍然为1.0而不是常规的1.33,所以YOLOv8各个模型尤其是大模型上参数量减小了,而小模型上增加的也不太多。
同时带来的一个问题也是设计上的不统一了,包括v6 damo-yolo都是大小模型各一套backbone,v7的设计个版本就更没有章法了。一套模型X L M S T N只改depth width因子是最理想状态,但是估计这些新的YOLO的作者往往发现和竞品对比时某一个版本稍弱或优势没那么大,于是就针对它调,效果是跳上去了,但是每个版本差别也越来越大,换版本的时候不能只是改下depth width因子了,各自调优稍显刻意了点。
关于Assign和Loss:
其实主要还是TOOD的思想,这个文章介绍的比较详细了 【YOLOv6、PP-YOLOE、PicoDet为什么都选择了TOOD?】,总结下来就是分类和回归任务具有较高一致性。但是v8分类loss目前还是使用的BCE,不知道使用VFL的时候精度如何,至于IoU loss可能也已经排列组合尝试过了采用了CIoU,loss_weight也调大了iou loss的比例。v8的Assign是全程采用TAL ,没有静态匹配ATSS,其实看v6的最新代码里也逐渐去除了ATSS阶段,而PPYOLOE里还是保留着约前1/3 阶段ATSS+后期TAL的设置。本人之前训TOOD也跳过ATSS和TAL的epoch数,ATSS静态匹配确实稍显生硬,但对于较简单的数据集还是挺有用。全程TAL对于遮挡多较难的数据集更合适。
关于训练细节:
几个综合YOLO的集合代码库已经火速安排上了复现的PR,比如MMYOLO和PaddleYOLO,今早看到了PaddleYOLO 里已经率先支持了YOLOv8的inference和部署速度。
具体训练可能都还得等的官方先公布完全吧。包括训练epoch数和预训练权重,这个已经在issue中有人问到了,这是对训练精度影响最大的两个方面,现在各个YOLO也已经很难做到公平对比了,以前还默认都是300epoch下640单尺度eval精度,所以后面的YOLO纷纷使用了1280尺度、加P6层、obj365预训练、自蒸馏、大蒸小蒸馏等外挂拼命往上刷,现在则是只剩下640单尺度eval精度。
关于部署和速度:
之前我的T4机器上就测过PaddleYOLO里的ppyoloe和v5 v7的速度对比,这下正好也直接验证了下v8的几个权重onnx的速度。最基础的测速,是640*640尺度下去nms bs=1的trt测速,各家YOLO发布时这个也是必测必写的,其实换算到FPS更直观点,但是FPS波动太大,多打20都有可能,而毫秒耗时则最多差个0.2ms。
看到PaddleYOLO 里yolov8表格的TRT-FP16-Latency的数据,发现和yolov5比小模型上速度比较接近,但大模型m l x上则变慢了不少,精度的巨大提升也牺牲了速度,这也可能是之前讨论的m l x比yolov5缩减了backbone的模块和通道数有关吧。理论上看模型结构改动尤其是head加大了很多,的确可能变慢的,具体等v8公布速度数据再看看(目前已公布速度数据,如上面图所示)。
YOLOv5
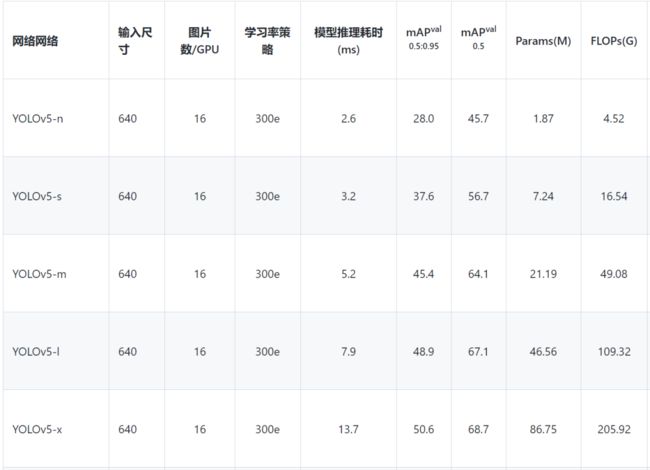
YOLOv8

PaddleYOLO 的modelzoo页面可以直观的看到几乎所有YOLO的精度速度对比,虽然是paddle框架但都是同一T4 GPU环境下册的还算是可以参考的:
github.com/PaddlePaddle/PaddleYOLO/blob/release/2.5/docs/MODEL_ZOO_cn.md
当然也期待yolov8论文中的超级大表格,那样会更直观。
star数是唯一评价标准吗
v8开源一天已经吸引了600多star数(截止2023年1月12日晚,已经1.3k star),热度非凡,最后想再稍微讨论下这个,一般来说大家首先都是看的star数去评价,但这个其实往往都是可以通过营销宣传来涨的,现在很多自媒体平台也极大的方便了传播,此外fork数基本都是被忽略的。yolov5代码普遍反应写的可读性极差不规范,但是他的star数就是一路飙升直至超过了mmdet和detectron2做到了检测领域第一,主要还是维护和生态应用做的好,此外forks数也有12.5k可见其影响力和使用范围。
我觉得还是需要看全面看待star fork等,一个代码库刚放出来的时候star肯定是暴涨的,当然也是配合着宣传营销,这个和新事物疯狂点收藏的一个道理。但是放出来一段时间后,star数的增长趋于平稳,这个时候其实可以关注下star/fork 比,一般来说在3~7的都算正常,10左右的基本上还是营销宣传PR一直在发力。起名呢也是个学问,只要起名直接叫yolov9 v10保准可以吸足流量,正如v5 v6 v7当初带动的一波又一波流量一样,但是我是觉得起名还得问问最初YOLO作者团队的同意,以示尊重经典。各大YOLO都还在继续保持着创新和更新,可以期待下yolov9 v10,不过不需要盲目就换模型,还是得大致了解下改进点和优劣势后再谨慎选择。
引用参考
[1]. https://github.com/ultralytics/ultralytics
[2]. https://github.com/PaddlePaddle/PaddleYOLO
YOLOv8 代码和教程下载
CVer后台回复:YOLOv8,即可下载源码和教程
目标检测交流群成立
扫描下方二维码,或者添加微信:CVer222,即可添加CVer小助手微信,便可申请加入CVer-目标检测 微信交流群。另外其他垂直方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch、TensorFlow和Transformer等。
一定要备注:研究方向+地点+学校/公司+昵称(如目标检测+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群
▲扫码或加微信号: CVer222,进交流群
CVer学术交流群(知识星球)来了!想要了解最新最快最好的CV/DL/ML论文速递、优质开源项目、学习教程和实战训练等资料,欢迎扫描下方二维码,加入CVer学术交流群,已汇集数千人!
▲扫码进群
▲点击上方卡片,关注CVer公众号整理不易,请点赞和在看