【PyTorch基础教程21】进阶训练技巧(损失函数、学习率、模型微调、半精度训练)
学习总结
- 自定义损失函数:函数定义、类定义(用得更多)。注意涉及到数学运算时,我们最好全程使用PyTorch提供的张量计算接口,这样就不需要我们实现自动求导功能并且我们可以直接调用cuda。
- 动态调整学习率:pytorch内置scheduler或者自定义scheduler。
- 模型微调:迁移学习的应用场景,如在目标数据集上训练目标模型,将从头训练输出层,而其余层的参数都是基于源模型的参数微调得到的。
- 获取pytorch中的预训练模型,冻结预训练模型中所有参数;
- 然后模型微调:如替换ResNet最后的2层网络,返回一个新模型
- 半精度训练:PyTorch默认的浮点数存储方式用的是
torch.float32,小数点后位数更多固然能保证数据的精确性,但绝大多数场景其实并不需要这么精确,只保留一半的信息也不会影响结果,也就是使用torch.float16格式。
文章目录
- 学习总结
- 一、自定义损失函数
-
- 1.1 以函数方式定义
- 1.2 以类方式定义
- 1.3 用自定义损失函数的完整栗子
- 二、动态调整学习率
-
- 2.1 使用官方scheduler
-
- (1)官方scheduler的API
- (2)使用scheduler的栗子
- 2.2 自定义scheduler
- 三、模型微调
-
- 3.1 模型微调的流程
- 3.2 使用pytorch已有模型
- 3.3 如何指定训练模型的部分层
- 四、半精度训练
-
- 4.1 半精度训练的设置
- 4.2 使用半精度训练的注意事项
- Reference
一、自定义损失函数
PyTorch在torch.nn模块为我们提供了许多常用的损失函数,比如:MSELoss,L1Loss,BCELoss等,但是有些时候我们需要自定义损失函数,提升模型的表现,如DiceLoss,HuberLoss,SobolevLoss等都没在pytorch库中。
1.1 以函数方式定义
自定义损失函数:
def my_loss(output, target):
loss = torch.mean((output - target)**2)
return loss
1.2 以类方式定义
- 虽然以函数定义的方式很简单,但是以类方式定义更加常用,在以类方式定义损失函数时,我们如果看每一个损失函数的继承关系我们就可以发现
Loss函数部分继承自_loss, 部分继承自_WeightedLoss, 而_WeightedLoss继承自_loss,_loss继承自 nn.Module。 - 在自定义损失函数时,涉及到数学运算时,最好全程使用PyTorch提供的张量计算接口,这样就不需要我们实现自动求导功能并且我们可以直接调用cuda,使用numpy或者scipy的数学运算时,操作会有些麻烦。
- 关于PyTorch使用Class定义损失函数的原因,可以参考PyTorch的讨论区(链接6)
我们可以将其当作神经网络的一层来对待,同样地,我们的损失函数类就需要继承自nn.Module类。Dice Loss是一种在分割领域常见的损失函数,定义如下:
D S C = 2 ∣ X ∩ Y ∣ ∣ X ∣ + ∣ Y ∣ DSC = \frac{2|X∩Y|}{|X|+|Y|} DSC=∣X∣+∣Y∣2∣X∩Y∣
实现代码如下:
class DiceLoss(nn.Module):
def __init__(self,weight=None,size_average=True):
super(DiceLoss,self).__init__()
def forward(self,inputs,targets,smooth=1):
inputs = F.sigmoid(inputs)
inputs = inputs.view(-1)
targets = targets.view(-1)
intersection = (inputs * targets).sum()
dice = (2.*intersection + smooth)/(inputs.sum() + targets.sum() + smooth)
return 1 - dice
# 使用方法
criterion = DiceLoss()
loss = criterion(input,targets)
除此之外,常见的损失函数还有BCE-Dice Loss,Jaccard/Intersection over Union (IoU) Loss,Focal Loss…
class DiceBCELoss(nn.Module):
def __init__(self, weight=None, size_average=True):
super(DiceBCELoss, self).__init__()
def forward(self, inputs, targets, smooth=1):
inputs = F.sigmoid(inputs)
inputs = inputs.view(-1)
targets = targets.view(-1)
intersection = (inputs * targets).sum()
dice_loss = 1 - (2.*intersection + smooth)/(inputs.sum() + targets.sum() + smooth)
BCE = F.binary_cross_entropy(inputs, targets, reduction='mean')
Dice_BCE = BCE + dice_loss
return Dice_BCE
--------------------------------------------------------------------
class IoULoss(nn.Module):
def __init__(self, weight=None, size_average=True):
super(IoULoss, self).__init__()
def forward(self, inputs, targets, smooth=1):
inputs = F.sigmoid(inputs)
inputs = inputs.view(-1)
targets = targets.view(-1)
intersection = (inputs * targets).sum()
total = (inputs + targets).sum()
union = total - intersection
IoU = (intersection + smooth)/(union + smooth)
return 1 - IoU
# 更多的可以参考链接1
1.3 用自定义损失函数的完整栗子
下面以训练简单模型(线性回顾)为栗子,使用自定义的损失函数。
# -*- coding: utf-8 -*-
import torch
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
#自定义损失函数
# 1. 继承nn.Mdule
class My_loss(nn.Module):
def __init__(self):
super().__init__()
def forward(self, x, y):
return torch.mean(torch.pow((x - y), 2))
# 2. 直接定义函数 , 不需要维护参数,梯度等信息
# 注意所有的数学操作需要使用tensor完成。
def my_mse_loss(x, y):
return torch.mean(torch.pow((x - y), 2))
# 3, 如果使用 numpy/scipy的操作 可能使用nn.autograd.function来计算了
# 要实现forward和backward函数
# Hyper-parameters 定义迭代次数, 学习率以及模型形状的超参数
input_size = 1
output_size = 1
num_epochs = 60
learning_rate = 0.001
# Toy dataset 1. 准备数据集
x_train = np.array([[3.3], [4.4], [5.5], [6.71], [6.93], [4.168],
[9.779], [6.182], [7.59], [2.167], [7.042],
[10.791], [5.313], [7.997], [3.1]], dtype=np.float32)
y_train = np.array([[1.7], [2.76], [2.09], [3.19], [1.694], [1.573],
[3.366], [2.596], [2.53], [1.221], [2.827],
[3.465], [1.65], [2.904], [1.3]], dtype=np.float32)
# Linear regression model
# 2. 定义网络结构 y=w*x+b 其中w的size [1,1], b的size[1,]
model = nn.Linear(input_size, output_size)
# Loss and optimizer 3.定义损失函数, 使用的是最小平方误差函数
# criterion = nn.MSELoss()
# 自定义函数1
criterion = My_loss()
# 4.定义迭代优化算法, 使用的是随机梯度下降算法
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)
loss_dict = []
# Train the model 5. 迭代训练
for epoch in range(num_epochs):
# Convert numpy arrays to torch tensors 5.1 准备tensor的训练数据和标签
inputs = torch.from_numpy(x_train)
targets = torch.from_numpy(y_train)
# Forward pass 5.2 前向传播计算网络结构的输出结果
outputs = model(inputs)
# 5.3 计算损失函数
# loss = criterion(outputs, targets)
# 1. 自定义函数1
# loss = criterion(outputs, targets)
# 2. 自定义函数
loss = my_mse_loss(outputs, targets)
# Backward and optimize 5.4 反向传播更新参数
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 可选 5.5 打印训练信息和保存loss
loss_dict.append(loss.item())
if (epoch+1) % 5 == 0:
print ('Epoch [{}/{}], Loss: {:.4f}'.format(epoch+1, num_epochs, loss.item()))
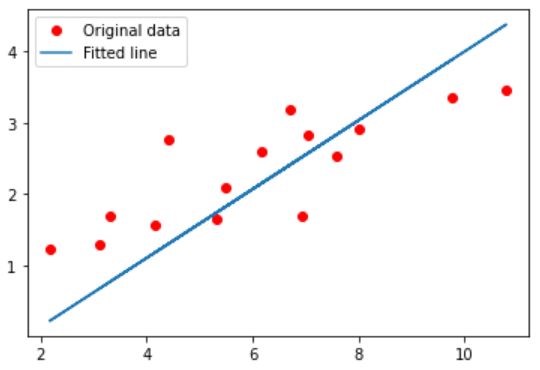
# Plot the graph 画出原y与x的曲线与网络结构拟合后的曲线
predicted = model(torch.from_numpy(x_train)).detach().numpy()
plt.plot(x_train, y_train, 'ro', label='Original data')
plt.plot(x_train, predicted, label='Fitted line')
plt.legend()
plt.show()
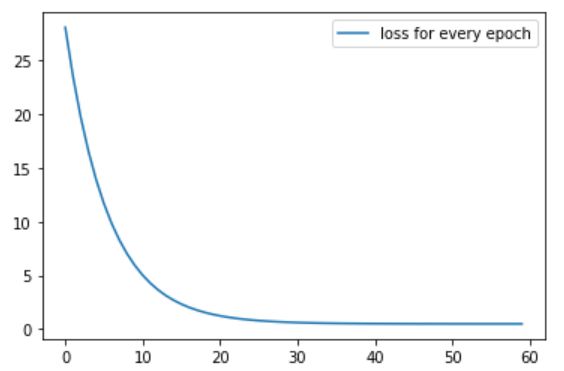
# 画loss在迭代过程中的变化情况
plt.plot(loss_dict, label='loss for every epoch')
plt.legend()
plt.show()
结果为:
Epoch [5/60], Loss: 13.8641
Epoch [10/60], Loss: 5.9160
Epoch [15/60], Loss: 2.6956
Epoch [20/60], Loss: 1.3905
Epoch [25/60], Loss: 0.8613
Epoch [30/60], Loss: 0.6463
Epoch [35/60], Loss: 0.5588
Epoch [40/60], Loss: 0.5228
Epoch [45/60], Loss: 0.5077
Epoch [50/60], Loss: 0.5011
Epoch [55/60], Loss: 0.4979
Epoch [60/60], Loss: 0.4961
画出原y与x的数据,网络结构拟合后的曲线:
画loss在迭代过程中的变化情况:
二、动态调整学习率
- 学习率的选择是深度学习中一个困扰人们许久的问题,学习速率设置过小,会极大降低收敛速度,增加训练时间;学习率太大,可能导致参数在最优解两侧来回振荡。
- 但是当我们选定了一个合适的学习率后,经过许多轮的训练后,可能会出现准确率震荡或loss不再下降等情况,说明当前学习率已不能满足模型调优的需求。可以使用scheduler机制:选择一个适当的学习率衰减策略来改善这种现象,提高我们的精度。
2.1 使用官方scheduler
(1)官方scheduler的API
在训练神经网络的过程中,学习率是最重要的超参数之一,PyTorch已经在torch.optim.lr_scheduler封装好了一些动态调整学习率的方法供我们使用,列出部分scheduler。
lr_scheduler.LambdaLRlr_scheduler.MultiplicativeLRlr_scheduler.StepLRlr_scheduler.MultiStepLRlr_scheduler.ExponentialLRlr_scheduler.CosineAnnealingLR
# 选择一种优化器
optimizer = torch.optim.Adam(...)
# 选择上面提到的一种或多种动态调整学习率的方法
scheduler1 = torch.optim.lr_scheduler....
scheduler2 = torch.optim.lr_scheduler....
...
schedulern = torch.optim.lr_scheduler....
# 进行训练
for epoch in range(100):
train(...)
validate(...)
optimizer.step()
# 需要在优化器参数更新之后再动态调整学习率
scheduler1.step()
...
schedulern.step()
(2)使用scheduler的栗子
- 使用官方给出的
torch.optim.lr_scheduler时,需要将scheduler.step()放在optimizer.step()后面进行使用。 - 下面以
torch.optim.lr_scheduler.LambdaLR为栗,其更新策略为:new_lr = λ × =\lambda \times =λ× initial_lr,其中new_lr是得到的新的学习率,initial_lr是初始的学习率, λ \lambda λ是通过参数lr_lambda和epoch得到的。
class torch.optim.lr_scheduler.LambdaLR(optimizer, lr_lambda, last_epoch=-1)
torch.optim.lr_scheduler.LambdaLR的参数:- optimizer (Optimizer):要更改学习率的优化器;
- lr_lambda(function or list):根据epoch计算 λ \lambda λ的函数;或者是一个list的这样的function,分别计算各个parameter groups的学习率更新用到的 λ \lambda λ;
- last_epoch (int):最后一个epoch的index,如果是训练了很多个epoch后中断了,继续训练,这个值就等于加载的模型的epoch。默认为-1表示从头开始训练,即从epoch=1开始。
- 下面栗子只是看每个epoch对应的学习速率,更新网络参数时省略了
loss.backward()。
import torch
import torch.nn as nn
from torch.optim.lr_scheduler import LambdaLR
initial_lr = 0.1
class model(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(in_channels=3, out_channels=3, kernel_size=3)
def forward(self, x):
pass
net_1 = model()
optimizer_1 = torch.optim.Adam(net_1.parameters(), lr = initial_lr)
scheduler_1 = LambdaLR(optimizer_1, lr_lambda=lambda epoch: 1/(epoch+1))
print("初始化的学习率:", optimizer_1.defaults['lr'])
for epoch in range(1, 11):
# train
optimizer_1.zero_grad()
optimizer_1.step()
print("第%d个epoch的学习率:%f" % (epoch, optimizer_1.param_groups[0]['lr']))
scheduler_1.step()
############ 结果如下 #################
初始化的学习率: 0.1
第1个epoch的学习率:0.100000
第2个epoch的学习率:0.050000
第3个epoch的学习率:0.033333
第4个epoch的学习率:0.025000
第5个epoch的学习率:0.020000
第6个epoch的学习率:0.016667
第7个epoch的学习率:0.014286
第8个epoch的学习率:0.012500
第9个epoch的学习率:0.011111
第10个epoch的学习率:0.010000
2.2 自定义scheduler
在实验中也有可能碰到需要我们自己定义学习率调整策略的情况,可以自定义函数adjust_learning_rate来改变param_group中lr的值。
假设现在实验中,需要学习率每30轮下降为原来的1/10,假设已有的官方API中没有符合我们需求的,那就需要自定义函数来实现学习率的改变。
def adjust_learning_rate(optimizer, epoch):
lr = args.lr * (0.1 ** (epoch // 30))
for param_group in optimizer.param_groups:
param_group['lr'] = lr
有了adjust_learning_rate函数的定义,在训练的过程就可以调用我们的函数来实现学习率的动态变化。
def adjust_learning_rate(optimizer,...):
...
optimizer = torch.optim.SGD(model.parameters(),lr = args.lr,momentum = 0.9)
for epoch in range(10):
train(...)
validate(...)
adjust_learning_rate(optimizer,epoch)
三、模型微调
-
随着深度学习的发展,模型的参数越来越大,许多开源模型都是在较大数据集上进行训练的,比如Imagenet-1k,Imagenet-11k,甚至是ImageNet-21k等。但在实际应用中,我们的数据集可能只有几千张,这时从头开始训练具有几千万参数的大型神经网络是不现实的,因为越大的模型对数据量的要求越大,过拟合无法避免。
-
场景:现在想从图像中识别出不同种类的椅子,然后将购买链接推荐给用户。
-
方法:先找出100种常见的椅子,为每种椅子拍摄1000张不同角度的图像,然后在收集到的图像数据集上训练一个分类模型。这个椅子数据集,样本数仍然不及ImageNet数据集中样本数的十分之⼀。这可能会导致使用于ImageNet数据集的复杂模型在这个椅子数据集上过拟合。同时,因为数据量有限,最终训练得到的模型的精度也可能达不到实用的要求。
- 解决方法1:收集更多数据,耗时耗力耗钱。
- 解决办法2:应用迁移学习(transfer learning),将从源数据集学到的知识迁移到目标数据集上。迁移学习的一大应用场景是模型微调(finetune)。简单来说,就是我们先找到一个同类的别人训练好的模型,把别人现成的训练好了的模型拿过来,换成自己的数据,通过训练调整一下参数。
例如,虽然ImageNet数据集的图像大多跟椅子无关,但在该数据集上训练的模型可以抽取较通用的图像特征,从而能够帮助识别边缘、纹理、形状和物体组成等。这些类似的特征对于识别椅子也可能同样有效。
在PyTorch中提供了许多预训练好的网络模型(VGG,ResNet系列,mobilenet系列…),这些模型都是PyTorch官方在相应的大型数据集训练好的。学习如何进行模型微调,可以方便我们快速使用预训练模型完成自己的任务。
3.1 模型微调的流程
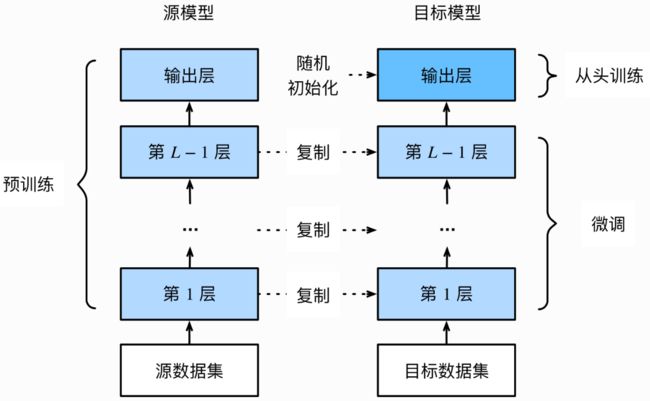
- 在源数据集(如ImageNet数据集)上预训练一个神经网络模型,即源模型。
- 创建一个新的神经网络模型,即目标模型。它复制了源模型上除了输出层外的所有模型设计及其参数。
- 我们假设这些模型参数包含了源数据集上学习到的知识,且这些知识同样适用于目标数据集。
- 我们还假设源模型的输出层跟源数据集的标签紧密相关,因此在目标模型中不予采用。
- 为目标模型添加一个输出大小为目标数据集类别个数的输出层,并随机初始化该层的模型参数。
- 在目标数据集上训练目标模型。我们将从头训练输出层,而其余层的参数都是基于源模型的参数微调得到的。
3.2 使用pytorch已有模型
这里我们以torchvision中的常见模型为例,列出了如何在图像分类任务中使用PyTorch提供的常见模型结构和参数。对于其他任务和网络结构,使用方式是类似的:
- 实例化网络
import torchvision.models as models
resnet18 = models.resnet18()
# resnet18 = models.resnet18(pretrained=False) 等价于与上面的表达式
alexnet = models.alexnet()
vgg16 = models.vgg16()
squeezenet = models.squeezenet1_0()
densenet = models.densenet161()
inception = models.inception_v3()
googlenet = models.googlenet()
shufflenet = models.shufflenet_v2_x1_0()
mobilenet_v2 = models.mobilenet_v2()
mobilenet_v3_large = models.mobilenet_v3_large()
mobilenet_v3_small = models.mobilenet_v3_small()
resnext50_32x4d = models.resnext50_32x4d()
wide_resnet50_2 = models.wide_resnet50_2()
mnasnet = models.mnasnet1_0()
- 传递
pretrained参数
通过True或者False来决定是否使用预训练好的权重,在默认状态下pretrained = False,意味着我们不使用预训练得到的权重,当pretrained = True,意味着我们将使用在一些数据集上预训练得到的权重。
import torchvision.models as models
resnet18 = models.resnet18(pretrained=True)
alexnet = models.alexnet(pretrained=True)
squeezenet = models.squeezenet1_0(pretrained=True)
vgg16 = models.vgg16(pretrained=True)
densenet = models.densenet161(pretrained=True)
inception = models.inception_v3(pretrained=True)
googlenet = models.googlenet(pretrained=True)
shufflenet = models.shufflenet_v2_x1_0(pretrained=True)
mobilenet_v2 = models.mobilenet_v2(pretrained=True)
mobilenet_v3_large = models.mobilenet_v3_large(pretrained=True)
mobilenet_v3_small = models.mobilenet_v3_small(pretrained=True)
resnext50_32x4d = models.resnext50_32x4d(pretrained=True)
wide_resnet50_2 = models.wide_resnet50_2(pretrained=True)
mnasnet = models.mnasnet1_0(pretrained=True)
注意事项:
-
通常PyTorch模型的扩展为
.pt或.pth,程序运行时会首先检查默认路径中是否有已经下载的模型权重,一旦权重被下载,下次加载就不需要下载了。 -
一般情况下预训练模型的下载会比较慢,我们可以直接通过迅雷或者其他方式去 这里 查看自己的模型里面
model_urls,然后手动下载,预训练模型的权重在Linux和Mac的默认下载路径是用户根目录下的.cache文件夹。在Windows下就是C:\Users\。我们可以通过使用\.cache\torch\hub\checkpoint torch.utils.model_zoo.load_url()设置权重的下载地址。 -
如果觉得麻烦,还可以将自己的权重下载下来放到同文件夹下,然后再将参数加载网络。
self.model = models.resnet50(pretrained=False) self.model.load_state_dict(torch.load('./model/resnet50-19c8e357.pth')) -
如果中途强行停止下载的话,一定要去对应路径下将权重文件删除干净,要不然可能会报错。
3.3 如何指定训练模型的部分层
在默认情况下,参数的属性.requires_grad = True,如果我们从头开始训练或微调不需要注意这里。但如果我们正在提取特征并且只想为新初始化的层计算梯度,其他参数不进行改变。那我们就需要通过设置requires_grad = False来冻结部分层。在PyTorch官方中提供了这样一个例程。
def set_parameter_requires_grad(model, feature_extracting):
if feature_extracting:
for param in model.parameters():
param.requires_grad = False
- 在下面我们仍旧使用
resnet18为例的将1000类改为4类,但是仅改变最后一层的模型参数,不改变特征提取的模型参数;- 注意我们先冻结模型参数的梯度;
- 再对模型输出部分的全连接层进行修改,这样修改后的全连接层的参数就是可计算梯度的。
- 之后在训练过程中,model仍会进行梯度回传,但是参数更新则只会发生在fc层。通过设定参数的
requires_grad属性,我们完成了指定训练模型的特定层的目标,这对实现模型微调非常重要。
import torchvision.models as models
# 冻结参数的梯度
feature_extract = True
model = models.resnet18(pretrained=True)
set_parameter_requires_grad(model, feature_extract)
# 修改模型
num_ftrs = model.fc.in_features
model.fc = nn.Linear(in_features=512, out_features=4, bias=True)
这里举个Pytorch肺部感染识别中的模型微调栗子(完整过程见下一篇—【Pytorch基础教程22】肺部感染识别任务(模型微调实战)),我们直接拿torchvision.models.resnet50模型微调,首先冻结预训练模型中的所有参数,然后替换掉最后两层的网络(替换2层池化层,还有fc层改为dropout,正则,线性,激活等部分),最后返回模型:
# 8 更改池化层
class AdaptiveConcatPool2d(nn.Module):
def __init__(self, size=None):
super().__init__()
size = size or (1, 1) # 池化层的卷积核大小,默认值为(1,1)
self.pool_one = nn.AdaptiveAvgPool2d(size) # 池化层1
self.pool_two = nn.AdaptiveAvgPool2d(size) # 池化层2
def forward(self, x):
return torch.cat([self.pool_one(x), self.pool_two(x), 1]) # 连接两个池化层
# 7 迁移学习:拿到一个成熟的模型,进行模型微调
def get_model():
model_pre = models.resnet50(pretrained=True) # 获取预训练模型
# 冻结预训练模型中所有的参数
for param in model_pre.parameters():
param.requires_grad = False
# 微调模型:替换ResNet最后的两层网络,返回一个新的模型
model_pre.avgpool = AdaptiveConcatPool2d() # 池化层替换
model_pre.fc = nn.Sequential(
nn.Flatten(), # 所有维度拉平
nn.BatchNorm1d(4096), # 256 x 6 x 6 ——> 4096
nn.Dropout(0.5), # 丢掉一些神经元
nn.Linear(4096, 512), # 线性层的处理
nn.ReLU(), # 激活层
nn.BatchNorm1d(512), # 正则化处理
nn.Linear(512,2),
nn.LogSoftmax(dim=1), # 损失函数
)
return model_pre
四、半精度训练
Pytorch模型经常需要用到硬件GPU加速,GPU的性能主要分为两部分:
- 算力:前者决定了显卡计算的速度
- 显存:后者则决定了显卡可以同时放入多少数据用于计算。
在可以使用的显存数量一定的情况下,每次训练能够加载的数据更多(也就是batch size更大),则也可以提高训练效率。
显存很重要:有时候数据本身也比较大(比如3D图像、视频等),显存较小的情况下可能甚至batch size为1的情况都无法实现。
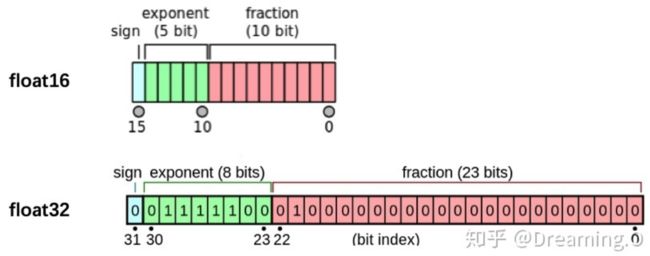
我们观察PyTorch默认的浮点数存储方式用的是torch.float32,小数点后位数更多固然能保证数据的精确性,但绝大多数场景其实并不需要这么精确,只保留一半的信息也不会影响结果,也就是使用torch.float16格式。由于数位减了一半,因此被称为“半精度”。
显然半精度能够减少显存占用,使得显卡可以同时加载更多数据进行计算。
4.1 半精度训练的设置
在PyTorch中使用autocast配置半精度训练,同时需要在下面三处加以设置:
- import autocast
from torch.cuda.amp import autocast
- 模型设置
在模型定义中,使用python的装饰器方法,用autocast装饰模型中的forward函数。关于装饰器的使用,可以参考这里:
@autocast()
def forward(self, x):
...
return x
- 训练过程
在训练过程中,只需在将数据输入模型及其之后的部分放入“with autocast():“即可:
for x in train_loader:
x = x.cuda()
with autocast():
output = model(x)
...
4.2 使用半精度训练的注意事项
半精度训练主要适用于数据本身的size比较大(比如说3D图像、视频等)。当数据本身的size并不大时(比如手写数字MNIST数据集的图片尺寸只有28*28),使用半精度训练则可能不会带来显著的提升。
Reference
- https://www.kaggle.com/bigironsphere/loss-function-library-keras-pytorch/notebook
- https://www.zhihu.com/question/66988664/answer/247952270
- https://blog.csdn.net/dss_dssssd/article/details/84103834
- 图像处理:自定义损失函数
- pytorch教程之损失函数详解——多种定义损失函数的方法
- https://discuss.pytorch.org/t/should-i-define-my-custom-loss-function-as-a-class/89468
- datawhale notebook
- PyTorch官方文档:https://pytorch.org/docs/stable/optim.html
- 参数更新
- 给不同层分配不同的学习率
- torch.optim.lr_scheduler:调整学习率
- PyTorch 1.0 中文官方教程:Torchvision模型微调
- 动手学深度学习(pytorch)-21 模型微调