两阶段鲁棒优化 | Biilinear 项的线性化
两阶段鲁棒优化 | Biilinear 项的线性化
文章目录
- 两阶段鲁棒优化 | Biilinear 项的线性化
- 问题描述
- 代码实现的时候踩的坑
问题描述
假设两阶段鲁棒问题为:min-max-min,其中max-min为第二阶段问题。
在采用C&CG算法求解的时候,将第二阶段的max-min作为一个子问题。该问题不能直接进行求解,对其处理的方式一般有三种:
1. 启发式
2. KKT
3. 对内层进行对偶
启发式一般只能针对特殊的问题。绝大多数问题都可以采用KKT或者对偶的方法。
- 利用KKT条件转换时,问题必须满足extended relatively complete recourse assumption,即对于任意给定的第一阶段变量值,第二阶段子问题永远是 feasible and bounded 的。但采用KKT的时,reformulate后的式子中的互补松弛约束,一般都可以非常容易地采用大M法进行线性化。
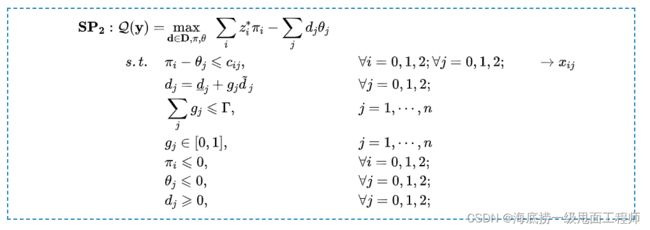
- 对偶是一直可用的,但对偶之后存在bilinear的项。
翻了十几篇国内外的论文,对于此处bilinear的项,一般采用两种方式:
- 摆烂,直接求解器求
- 采用下面Gabrel1 的这个proposition
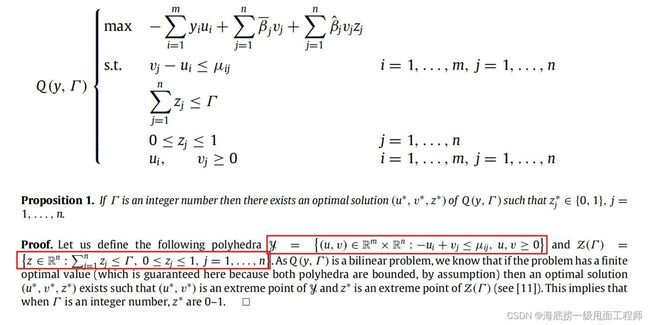
主要意思就是说,如果一个bilinear的问题有一个finite optimal value,那么bilinear项中变量的最优值分别在各自polyhedra的extreme point上(这部分线性规划的内容可以移步B站看方述诚老师的视频)。
据此,当 Γ \Gamma Γ为一个整数的时候, z j z_j zj的最优解必定是0或1,而这个时候,bilinear的项就可以用大M法进行线性化了。( Γ \Gamma Γ为整数必须满足,否则极点不一定为0或1)
代码实现的时候踩的坑
向大佬请教了半天,结果发现是我自己没有搞清楚问题的本质。
原问题和线性化后的问题一定是相等的,即:
如果原问题是unbounded或者infeasible的,线性化后仍然一定是unbounded或者infeasible的
但我在代码实验的时候,发现当原问题unbounded的时候,线性化后的问题却有解
这里demo借用了运小筹公众号
鲁棒优化| C&CG算法求解两阶段鲁棒优化:全网最完整、最详细的【入门-完整推导-代码实现】笔记
中的一个例子。(入门两阶段鲁棒强烈推荐)
原问题(bilinear)代码如下:
from gurobipy import *
import numpy as np
K = 3
q = 2
""" The input parameter """
trans_cost = [[22, 33, 24],
[33, 23, 30],
[20, 25, 27]]
demand_nominal = [206, 274, 220]
demand_var = [40, 40, 40]
eposilon = 10e-6
""" build problem """
""" Create variables """
m = Model('master problem')
g_index = {}
pi_index = {}
theta_index ={}
d_index = {}
w_index = {}
for i in range(K):
pi_index[i] = 0
for j in range(K):
g_index[j] = 0
d_index[j] = 0
theta_index[j] = 0
w_index[j] =0
m.setParam('NonConvex',2)
g = m.addVars(g_index.keys(), lb=0, ub=1, vtype=GRB.CONTINUOUS, name='g')
pi = m.addVars(pi_index.keys(), lb=-GRB.INFINITY, ub=0, vtype=GRB.CONTINUOUS, name='pi')
theta = m.addVars(theta_index.keys(), lb=-GRB.INFINITY, ub=0, vtype=GRB.CONTINUOUS, name='theta')
w = m.addVars(w_index.keys(), lb=0, ub=GRB.INFINITY, vtype=GRB.CONTINUOUS, name='w')
""" Set objective """
obj = LinExpr()
for i in range(K):
obj.addTerms(q, pi[i])
obj2 = QuadExpr()
obj3 = LinExpr()
for j in range(K):
obj2.addTerms(demand_var[j], g[j],theta[j])
obj3.addTerms(demand_nominal[j],theta[j])
# obj2.addTerms(1,d[j],theta[j])
m.setObjective(obj-obj2-obj3, GRB.MAXIMIZE)
""" Add Constraints """
# cons 1
for i in range(K):
for j in range(K):
m.addConstr(pi[i] - theta[j] <= trans_cost[i][j])
# for j in range(3):
# m.addConstr(d[j] == demand_nominal[j] + g[j] * demand_var[j])
exp = LinExpr()
for j in range(K):
exp.addTerms(1,g[j])
m.addConstr(g[j] <= 2)
m.optimize()
m.write('m.lp')
线性化(令 w j = g j θ j w_j = g_j\theta_j wj=gjθj,再用大M法)后的代码如下:
""" Set objective 2"""
obj = LinExpr()
for i in range(K):
obj.addTerms(q, pi[i])
obj2 = LinExpr()
obj3 = LinExpr()
for j in range(K):
obj2.addTerms(-demand_var[j], w[j])
obj3.addTerms(demand_nominal[j],theta[j])
# obj2.addTerms(1,d[j],theta[j])
m.setObjective(obj-obj2-obj3, GRB.MAXIMIZE)
""" Add Constraints """
# cons 1
for i in range(K):
for j in range(K):
m.addConstr(pi[i] - theta[j] <= trans_cost[i][j])
# for j in range(3):
# m.addConstr(d[j] == demand_nominal[j] + g[j] * demand_var[j])
exp = LinExpr()
for j in range(K):
exp.addTerms(1,g[j])
m.addConstr(g[j] <= 2)
M = 10e9
for j in range(K):
m.addConstr(w[j] <= M * g[j])
m.addConstr(w[j] <= -theta[j])
m.addConstr(w[j] >= -theta[j] - M * (1 - g[j]))
m.optimize()
m.write('m2.lp')
结果跑完发现原问题unbounded,线性化之后却有最优解。
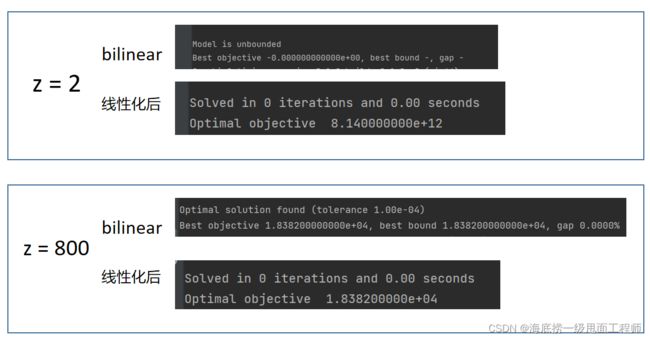
把代码来来回回重写检查了很多遍,开始怀疑线性化对原问题会有影响。However,理论经过了这么多代人的检验,一般是不会错的!最后问了师兄,提了句大M法,一针见血发现了问题就在这里:
大M的值取的太小了! 导致线性化后的不等式不能按照你的想法来。
解决方法:
M = 10e9
改为
M = GRB.INFINITY
对线性化不太熟悉的可以看这里:
【教学视频】优化 | 线性化:两个0-1变量相乘的线性化
【教学视频】优化 | 线性化(2):连续变量 * 0-1变量的线性化
Gabrel V, Lacroix M, Murat C, et al. Robust location transportation problems under uncertain demands[J]. Discrete Applied Mathematics, 2014, 164: 100-111. ↩︎