《PyTorch深度学习实践》Lecture_10 卷积神经网络基础 CNN
B站刘二大人老师的《PyTorch深度学习实践》Lecture_10 重点回顾+代码复现
Lecture_10 卷积神经网络 Convolutional Neural Network
一、重点回顾——卷积神经网络的结构

(一) 卷积层:特征提取
1. 卷积核尺寸的确定
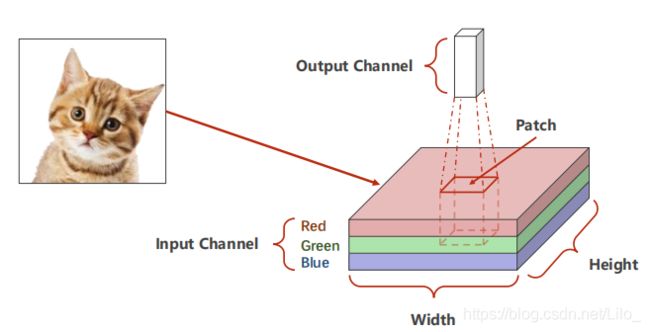
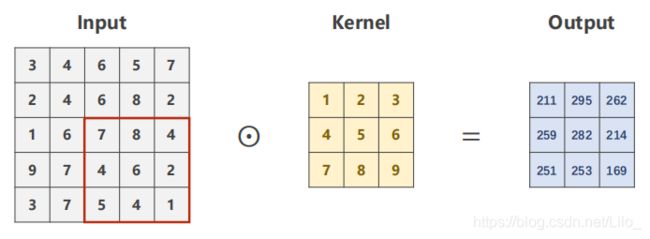
(1) 单输入通道
滤波器filter/卷积核kernel在输入图像上滑动,遍历,并做数乘运算(对应元素相乘)再相加【即互相关运算】得到输出。
(2)3输入通道

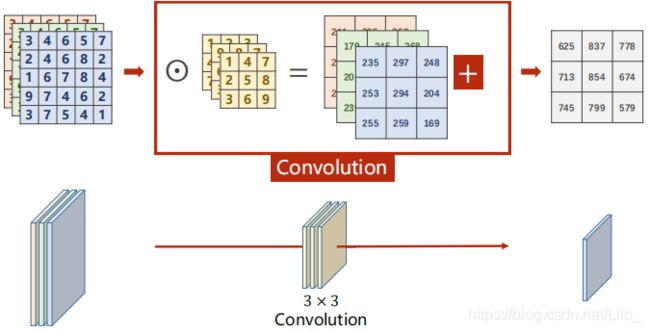

(3)N输入通道

输出通道的高和宽 = 输入通道的高和宽 - 卷积核的高和宽 + 1
卷积核通道数 = 输入通道数
输出通道数 = 卷积核的数量
(4) N输入通道M输出通道

个人理解:输入图像的每一个通道与一个卷积核的每一个通道做卷积运算,n个卷积运算结果相加,得到一个特征提取图,即输出图像的一个通道。每个卷积核进行n次卷积运算。
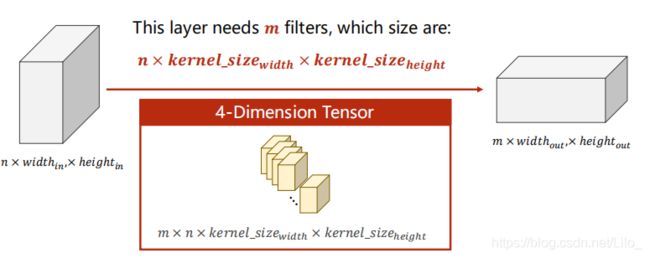
m个n通道的卷积核,卷积核大小为输出图像的宽高-输入图像宽高+1
2. 零填充和步长 Padding and Stride
Padding 在输入图像四周补零

输出通道的宽高=输入通道宽高-卷积核宽高+1
Stride 卷积核每次移动的间隔

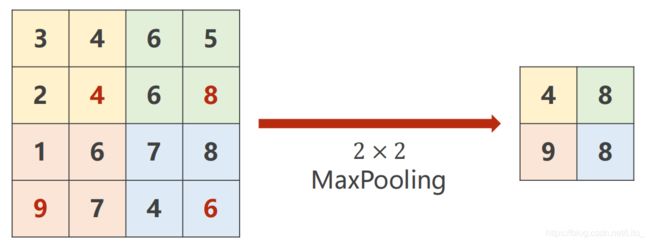
(二)池化层:减少数据量,降低运算需求
1. 最大池化
找最大的元素,默认步长为2
(三)全连接层:分类,输出结果
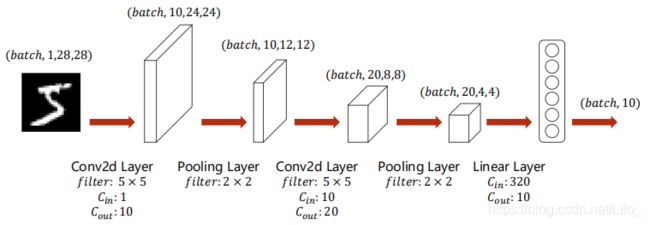
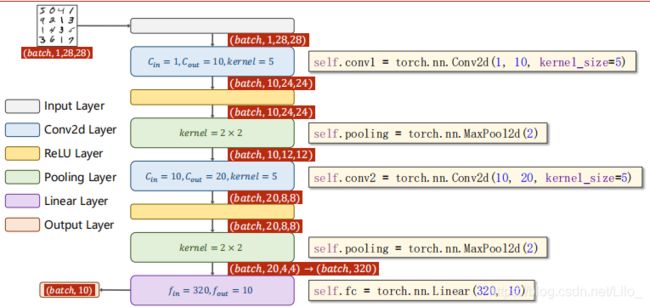
二、代码复现
一个简单的卷积神经网络:
# 卷积层的输入输出
import torch
in_channels,out_channels = 5,10
width,height = 100,100
kernel_size = 3
batch_size = 1
input = torch.randn(batch_size,in_channels,width,height)
conv_layer = torch.nn.Conv2d(in_channels,out_channels,kernel_size=kernel_size)
output = conv_layer(input)
print(input.shape)
print(output.shape)
print(conv_layer.weight.shape)

# 卷积运算结果输出
input2 = [3,4,6,5,7, 2,4,6,8,2, 1,6,7,8,4, 9,7,4,6,2, 3,7,5,4,1]
input2 = torch.Tensor(input2).view(1, 1, 5, 5)
conv_layer2 = torch.nn.Conv2d(1, 1, kernel_size=3, stride=2, bias=False)
kernel = torch.Tensor([1,2,3,4,5,6,7,8,9]).view(1, 1, 3, 3)
conv_layer2.weight.data = kernel.data
output2 = conv_layer2(input2)
print(output2)
# 最大池化
input3 = [3,4,6,5, 2,4,6,8, 1,6,7,8, 9,7,4,6, ]
input3 = torch.Tensor(input3).view(1, 1, 4, 4)
maxpooling_layer = torch.nn.MaxPool2d(kernel_size=2)
output3 = maxpooling_layer(input3)
print(output3)
# Move Module to GPU
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
# Move Tensors to GPU
# Send the inputs and targets at every step to the GPU.(写在train和test的循环体里)
inputs, target = data
inputs, target = inputs.to(device),target.to(device)
全部代码:
import torch
import torch.nn.functional as F
from torchvision import transforms
from torchvision import datasets
from torch.utils.data import DataLoader
import torch.optim as optim
# Prepare Dataset
batch_size = 64
transform = transforms.Compose([
transforms.ToTensor(), # Convert the PIL Image to Tensor
transforms.Normalize((0.1307,),(0.3081,))
])
train_dataset = datasets.MNIST(root='./dataset/mnist/',train=True,download=True,transform=transform)
train_loader = DataLoader(train_dataset,shuffle=True,batch_size=batch_size)
test_dataset = datasets.MNIST(root='./dataset/mnist/',train=False,download=True,transform=transform)
test_loader = DataLoader(train_dataset,shuffle=False,batch_size=batch_size)
class Net(torch.nn.Module):
"""docstring for Net"""
def __init__(self):
super(Net, self).__init__()
self.conv1 = torch.nn.Conv2d(1,10,kernel_size=5)
self.conv2 = torch.nn.Conv2d(10,20,kernel_size=5)
self.pooling = torch.nn.MaxPool2d(2)
self.fc = torch.nn.Linear(320,10)
def forward(self,x):
# Flatten data from (n,1,28,28) to (n,784)
batch_size = x.size(0)
x = F.relu(self.pooling(self.conv1(x)))
x = F.relu(self.pooling(self.conv2(x)))
x = x.view(batch_size,-1) # Flatten
x = self.fc(x)
return x
model = Net()
# Move Module to GPU
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)
model = model.to(device)
# Construct Loss and Optimizer
criterion = torch.nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(),lr=0.01,momentum=0.5)
def train(epoch):
running_loss = 0.0
for batch_idx,data in enumerate(train_loader,0):
# Move Tensors to GPU
inputs, target = data
inputs, target = inputs.to(device),target.to(device)
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs,target)
loss.backward()
optimizer.step()
running_loss += loss.item()
if batch_idx % 300 == 299:
print('[%d,%5d] loss:%.3f' % (epoch+1,batch_idx+1,running_loss/2000))
running_loss = 0.0
def test():
correct = 0
total = 0
with torch.no_grad():
for data in test_loader:
# Move Tensors to GPU
inputs, target = data
inputs, target = inputs.to(device),target.to(device)
outputs = model(inputs)
_,predicted = torch.max(outputs.data,dim=1)
total += target.size(0)
correct += (predicted==target).sum().item()
print('Accuracy on test set: %d %%' % (100*correct/total))
if __name__ == '__main__':
for epoch in range(10):
train(epoch)
test()
