open3d可视化对应点连线
目录
- 写在前面
- 准备
- 修改源码
-
- Registration.h
- Registration.cpp
- 使用
-
- 编译与使用
- 参考
- 完
写在前面
1、本文内容
open3d点云配准时,添加点对连线,用于可视化当前的correspondences
2、平台
windows10, visual studio 2019
3、转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/123351399
准备
编译open3d:
https://blog.csdn.net/qq_41102371/article/details/121014372
修改源码
Registration.h
本地找到pipelines/registration/Registration.h,在里面RegistrationResult添加成员CorrespondenceSet correspondence_set_mutulfilter
原始代码
https://github.com/isl-org/Open3D/blob/v0.13.0/cpp/open3d/pipelines/registration/Registration.h#L129
public:
/// The estimated transformation matrix.
Eigen::Matrix4d_u transformation_;
/// Correspondence set between source and target point cloud.
CorrespondenceSet correspondence_set_;
/// RMSE of all inlier correspondences. Lower is better.
double inlier_rmse_;
/// For ICP: the overlapping area (# of inlier correspondences / # of points
/// in target). Higher is better.
/// For RANSAC: inlier ratio (# of inlier correspondences / # of
/// all correspondences)
double fitness_;
添加后
public:
/// The estimated transformation matrix.
Eigen::Matrix4d_u transformation_;
/// Correspondence set between source and target point cloud after mutul filter
CorrespondenceSet correspondence_set_mutulfilter;
/// Correspondence set between source and target point cloud.(final)
CorrespondenceSet correspondence_set_;
/// RMSE of all inlier correspondences. Lower is better.
double inlier_rmse_;
/// For ICP: the overlapping area (# of inlier correspondences / # of points
/// in target). Higher is better.
/// For RANSAC: inlier ratio (# of inlier correspondences / # of
/// all correspondences)
double fitness_;
Registration.cpp
pipelines/registration/Registration.cpp,原始代码
https://github.com/isl-org/Open3D/blob/v0.13.0/cpp/open3d/pipelines/registration/Registration.cpp#L338
// Empirically mutual correspondence set should not be too small
if (int(corres_mutual.size()) >= ransac_n * 3) {
utility::LogDebug("{:d} correspondences remain after mutual filter",
corres_mutual.size());
return RegistrationRANSACBasedOnCorrespondence(
source, target, corres_mutual, max_correspondence_distance,
estimation, ransac_n, checkers, criteria);
}
改成
// Empirically mutual correspondence set should not be too small
if (int(corres_mutual.size()) >= ransac_n * 3) {
utility::LogDebug("{:d} correspondences remain after mutual filter",
corres_mutual.size());
RegistrationResult result_output =
RegistrationRANSACBasedOnCorrespondence(
source, target, corres_mutual,
max_correspondence_distance, estimation, ransac_n,
checkers, criteria);
result_output.correspondence_set_mutulfilter = corres_mutual;
return result_output;
使用
在此基础上,(cmakelists文件不变)
open3d使用fpfh做点云配准 https://blog.csdn.net/qq_41102371/article/details/121066031,添加可视化ransac之前的特征匹配的代码:
// ----------------------------------------------------------------------------
// - Open3D: www.open3d.org -
// ----------------------------------------------------------------------------
// The MIT License (MIT)
//
// Copyright (c) 2018 www.open3d.org
//
// Permission is hereby granted, free of charge, to any person obtaining a copy
// of this software and associated documentation files (the "Software"), to deal
// in the Software without restriction, including without limitation the rights
// to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
// copies of the Software, and to permit persons to whom the Software is
// furnished to do so, subject to the following conditions:
//
// The above copyright notice and this permission notice shall be included in
// all copies or substantial portions of the Software.
//
// THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
// IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
// FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
// AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
// LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
// FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS
// IN THE SOFTWARE.
// ----------------------------------------------------------------------------
#include 编译与使用
cd open3d_fpfh_registration
cmake -DOpen3D_ROOT="D:/carlos/code/open3d13/test/install/" -S . -B ./build_r
cmake --build ./build_r --config Release --target ALL_BUILD
.\build_r\Release\RegistrationRANSAC.exe .\bun045.ply .\bun000.ply 0.003 --visualize
其中,D:/carlos/code/open3d13/test/install/是你当前编译open3d的安装路径,根据自己的来
结果
mutual filter之后,ransac之前
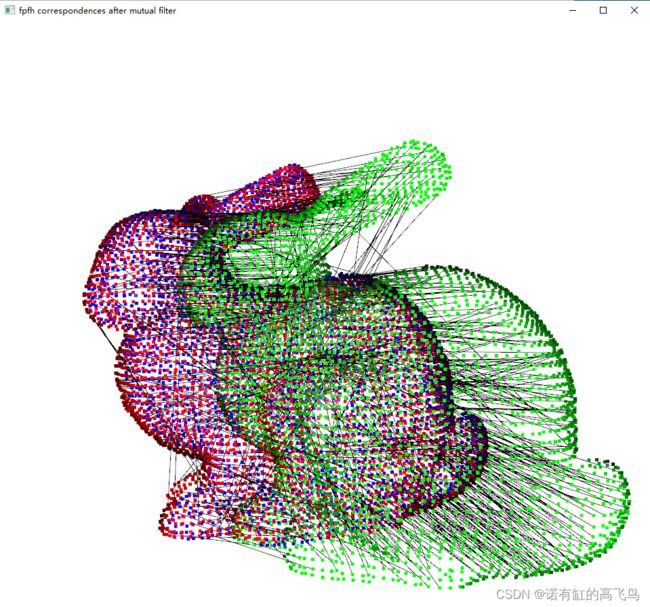
ransac之后

参考
文中已列出
完
如有错漏,敬请指正
--------------------------------------------------------------------------------------------诺有缸的高飞鸟202203