强化学习(一):Q-learning,附源码解读
强化学习(一):Q-learning,附源码解读
- Q-learning
强化学习与有监督学习和无监督学习为机器学习的三个方向,它主要解决的是决策问题,尤其是连续决策问题。
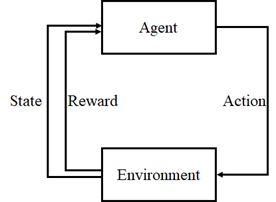
插入一幅强化学习框图,其中
学习主体(Agent):强化学习体系中的“学习者”;
环境(Environment):主体的行为再环境中产生、环境对主体产生影响;
状态(State):环境反馈给主体的状态的集合;
奖赏(Reward):环境对主体行为的反馈的集合;
行为(Action):主体在环境中的行动的集合。
强化学习根据不同条件有不同的分类,这篇文章讲一讲基于价值的离线强化学习:Q-learning。
Q-learning
Q-learning的目的是学习特定State下、特定Action的价值。建立一个Q-table,以State为行、Action为列,通过每个动作带来的奖赏Reward更新Q-table。
Q-learning属于离线学习,它是一种异策略的学习,所谓的异策略的意思是指行动策略和评估策略不是一个策略。

Q即为Q(s,a)就是在某一时刻的s状态下(s∈S),采取动作a(a∈A)动作能够获得收益的期望,环境会根据agent的动作反馈相应的回报Reward r,所以算法的主要思想就是将State与Action构建成一张Q-table来存储Q值,然后根据Q值来选取能够获得最大收益的动作。
下面附上源码解析,需要公式推导的小伙伴参考这位博主的博客:
https://blog.csdn.net/qq_30615903/article/details/80739243
几个说明:
1.下面所说的窗口也可以叫做画布,个人比较喜欢叫窗口;
2.源码最后会附上百度云链接给大家,因为文件不是很大,就放百度云上了,放github可能会碰到内网连不上等问题,那还不如百度云;
3.如果有解释错误的地方大家见谅,并及时告知博主一下,互相学习,谢谢。
这里按照运行顺序进行剖析:
主文件是q_learning_agent.py,首先运行主函数,会生成一个env的类,其继承了父类Env(),首先进行初始化init:
主函数:
if __name__ == "__main__":
env = Env()
agent = QLearningAgent(actions=list(range(env.n_actions)))
for episode in range(1000): #循环1000次
state = env.reset()
while True:
env.render()
# agent产生动作
action = agent.get_action(str(state)) #str()是把数字转为字符串
next_state, reward, done = env.step(action)
# 更新Q表
agent.learn(str(state), action, reward, str(next_state))
state = next_state #状态更新
env.print_value_all(agent.q_table)
# 当到达终点就终止游戏开始新一轮训练
if done:
break
env = Env():
class Env(tk.Tk): #创建一个父类窗口
def __init__(self):
super(Env, self).__init__() #super(Ecv,self)首先找到Env的父类(tk.Tk),然后把类Env的对象转换为类(tk.Tk)的对象
self.action_space = ['u', 'd', 'l', 'r'] #动作空间,上下左右
self.n_actions = len(self.action_space) #动作个数
self.title('Q Learning') #应该是窗口标题
self.geometry('{0}x{1}'.format(HEIGHT * UNIT, HEIGHT * UNIT)) #窗口尺寸
self.shapes = self.load_images() #把图片加载进入窗口中
self.canvas = self._build_canvas() #建立画布的相关属性
self.texts = [] #建立一个空列表
相关注释都在后面写上了,这里介绍几个比较难懂的点,窗口尺寸是500×500,文件开头赋初值给写了,整个action共有四个动作,分别是上、下、左、右移动,其分别有一个值来对应,为0、1、2、3;
然后是load_images():
def load_images(self):
rectangle = PhotoImage(
Image.open("../img/rectangle.png").resize((65, 65))) #把图片加载到load_images,图片尺寸为65×65,窗口每一个网格尺寸为100×100
triangle = PhotoImage(
Image.open("../img/triangle.png").resize((65, 65)))
circle = PhotoImage(
Image.open("../img/circle.png").resize((65, 65)))
return rectangle, triangle, circle
窗口每个栅格为什么是100×100后面讲,这里load_images函数的作用可以这么理解,相当于把图片加载进来,也就是预先加载,后面再放进窗口中;
_build_canvas:
def _build_canvas(self): #建立画布的相关属性
canvas = tk.Canvas(self, bg='white',
height=HEIGHT * UNIT,
width=WIDTH * UNIT) #窗口属性,背景色为白色,高度和宽度为500
# create grids
for c in range(0, WIDTH * UNIT, UNIT): # 0~400 by 100,长度为400,每100画一条线,从左往右为x,从上往下为y
x0, y0, x1, y1 = c, 0, c, HEIGHT * UNIT
canvas.create_line(x0, y0, x1, y1) #创建线条
for r in range(0, HEIGHT * UNIT, UNIT): # 0~400 by 100
x0, y0, x1, y1 = 0, r, HEIGHT * UNIT, r
canvas.create_line(x0, y0, x1, y1)
# add img to canvas,往画布中加入图形
self.rectangle = canvas.create_image(50, 50, image=self.shapes[0])
self.triangle1 = canvas.create_image(250, 150, image=self.shapes[1])
self.triangle2 = canvas.create_image(150, 250, image=self.shapes[1])
self.circle = canvas.create_image(250, 250, image=self.shapes[2])
# pack all
canvas.pack() #包装,打包
return canvas
这里比较迷糊的可能就是for循环那里了,for循环的意思是对窗口进行切割,切成5×5大小的类似栅格地图一样的表格,至于为什么是0~400每100循环一次,这个是python的语法特性,不多解释。
放幅图辅助理解:

比如左边的红框(其实是没有框的,只是便于理解)是一个窗口,右边就是分为5×5的表格。
然后再往里面放入刚刚预加载的图形,两个三角形和一个圆形,如果碰到了三角形则Reward<0,表示惩罚;碰到了圆形则Reware>0,表示奖励。
然后是QLearningAgent:
初始化定义了几个参数,比如学习率以及几个策略的系数,还以字典的格式定义了Q-table:
class QLearningAgent:
def __init__(self, actions):
# actions = [0, 1, 2, 3]
self.actions = actions #共有四个动作,分别用0,1,2,3代替上下左右
self.learning_rate = 0.01 #学习率
self.discount_factor = 0.9 #奖励性衰变系数
self.epsilon = 0.1 #策略系数
self.q_table = defaultdict(lambda: [0.0, 0.0, 0.0, 0.0])
进入主函数循环for episode in range(1000):
state = env.reset():
def reset(self):
self.update() #合并两个集合,重复元素进行合并,不重复元素并存
time.sleep(0.5) #推迟0.5s调用线程的运行,也就是下面的命令行要过0.5s才能运行,意思应该是让上方的数据合并完了再训练
x, y = self.canvas.coords(self.rectangle) #矩形的位置,初始位置为(50,50)
self.canvas.move(self.rectangle, UNIT / 2 - x, UNIT / 2 - y) #调回起点,第一格
self.render() #是一个更新的函数
# return observation
return self.coords_to_state(self.canvas.coords(self.rectangle)) #返回矩形的状态,应该意思是对应的Q-table的坐标
这里reset意思就是当运行完一回合后,将矩形(矩形相当于agent)归为原点,原点是上面5×5表格中左上角那个位置;
这里有一个函数coords_to_state():
def coords_to_state(self, coords):
x = int((coords[0] - 50) / 100)
y = int((coords[1] - 50) / 100)
return [x, y]
它的意思就是正常的坐标(比如原点)是(50,50),那么它对应的Q-table中的位置就是(0,0),上面的5×5的表格就可以看成是一个Q-table;
进入主函数的while循环:
env.render()就不介绍了,是一个更新窗口的函数:
def render(self):
time.sleep(0.03) #延时0.03秒
self.update() #更新
action = agent.get_action(str(state)):
def get_action(self, state):
if np.random.rand() < self.epsilon: #有概率的进入这个判断语句中
# 贪婪策略随机探索动作
action = np.random.choice(self.actions) #从self.action=[0,1,2,3]随机选择
else:
# 从q表中选择
state_action = self.q_table[state]
action = self.arg_max(state_action) #这里的选取动作如果value一致,则随机选取
return action
字面意思就是获得一个动态action,刚开始这个动作是随机获得的,所以第一次循环进入的一定是else后面的语句中,这里着重讲self.q_table[state],前面已经说了,q_table是我们定义的字典,那么q_table就是获得字典中对应名为state的值,举例:’[0,0]’ : [0.0,0.0,0.0,0.0],这是字典q_table中的内容,那么它的名就是’[0,0]’,名’[0,0]'对应的值为[0.0,0.0,0.0,0.0],所以self.q_table[state]返回的就是[0.0,0.0,0.0,0.0](有的官方名词可能称呼不规范,见谅);
后面的self.arg_max(state_action):
def arg_max(state_action):
max_index_list = []
max_value = state_action[0]
for index, value in enumerate(state_action):
if value > max_value:
max_index_list.clear()
max_value = value
max_index_list.append(index)
elif value == max_value:
max_index_list.append(index)
return random.choice(max_index_list)
这里就是选取动作了,前面说了,刚开始运行的时候动作是随机的,我们可以代入一个值具体分析,就比如刚刚的[0.0,0.0,0.0,0.0],进入for循环,第一次循环的index是0,value=0.0,进入elif语句,就是给max_index_list列表加入index索引,循环四次加入四次索引,最后运行到return语句的时候,max_index_list=[0,1,2,3],意思就是索引值为0,1,2,3(分别对应一个动作action,前面说到了)的Q值是一样的,所以随机选取一个值,比如2,返回;
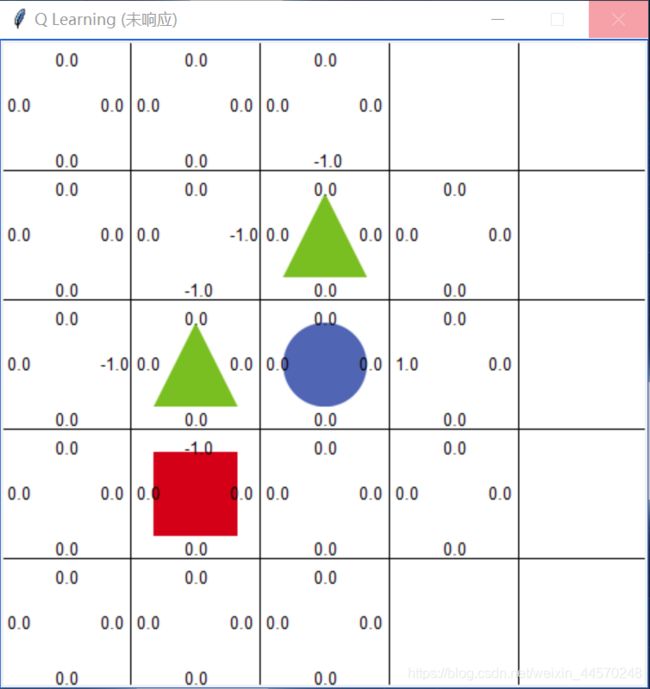
比如这幅图,会进入if语句,原因是在遍历矩形所在位置的四个Q值时,发现0.0>-1.0,所以清除-1.0这个值,只在列表max_index_list中留三个Q值为0.0的索引值index然后随机选取,这样做就满足了Q-learning的基本思想:根据Q值来选取能够获得最大收益的动作。
next_state, reward, done = env.step(action):
def step(self, action):
state = self.canvas.coords(self.rectangle) #转回画布中的坐标
base_action = np.array([0, 0])
self.render()
if action == 0: # up
if state[1] > UNIT:
base_action[1] -= UNIT
elif action == 1: # down
if state[1] < (HEIGHT - 1) * UNIT:
base_action[1] += UNIT
elif action == 2: # left
if state[0] > UNIT:
base_action[0] -= UNIT
elif action == 3: # right
if state[0] < (WIDTH - 1) * UNIT:
base_action[0] += UNIT
# 移动
self.canvas.move(self.rectangle, base_action[0], base_action[1]) #根据上面的动作选择移动矩形
self.canvas.tag_raise(self.rectangle) #相当于置顶
next_state = self.canvas.coords(self.rectangle)
# 判断得分条件,Reward
if next_state == self.canvas.coords(self.circle):
reward = 100
done = True
elif next_state in [self.canvas.coords(self.triangle1),
self.canvas.coords(self.triangle2)]:
reward = -100
done = True
else:
reward = 0
done = False
next_state = self.coords_to_state(next_state) #又变回Q表的坐标
return next_state, reward, done
前面已经得到了下一步要进行的动作action,然后函数step就是进行矩形位置的更新以及奖赏reward的计算,以及判断矩形是否碰到三角形(障碍物)或者圆形(终点),如果是,则说明这一回合结束了,done会返回true,后面会退出while循环,重新开始新的一回合;
这一部分的代码还是比较好理解的,主要讲里面的self.canvas.tag_raise(self.rectangle)相当于置顶,意思就是如果矩形运行到了比如圆形的位置,如果没有这行代码,则虽然你知道它运行到了,但是你直观上是看不到的,如果有这行代码,则矩形会覆盖圆形。
后面就是更新Q表:
agent.learn(str(state), action, reward, str(next_state)):
def learn(self, state, action, reward, next_state):
current_q = self.q_table[state][action] #找到Q表中对应的坐标,分别给其加入选择状态的Reward
# 贝尔曼方程更新
new_q = reward + self.discount_factor * max(self.q_table[next_state]) #更新Q值
self.q_table[state][action] += self.learning_rate * (new_q - current_q)
这里是Q值的计算就不阐述了;
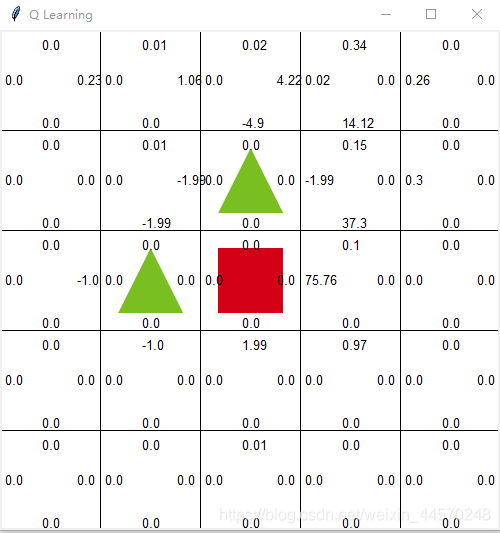
然后是state更新,print_value_all:
def print_value_all(self, q_table):
for i in self.texts:
self.canvas.delete(i)
self.texts.clear()
for i in range(HEIGHT):
for j in range(WIDTH):
for action in range(0, 4): #这里应该是遍历窗口的每一个栅格框进行text更新
state = [i, j]
if str(state) in q_table.keys():
temp = q_table[str(state)][action] #q_table[str(state)]是根据state查找字典q_table中对应的值,然后action你们懂得
self.text_value(j, i, round(temp, 2), action) #round是四舍五入
这个print_all_value是在窗口上重新发布Q值,大家看一张图就知道了。
最后附上百度云链接:
链接:https://pan.baidu.com/s/1Gt8waFzwWGiKg4ubMZQxAg
提取码:8888