from collections import deque
import numpy as np
#import imutils
import cv2
import time
#设定红色阈值,HSV空间
redLower = np.array([170, 100, 100])
redUpper = np.array([179, 255, 255])
#初始化追踪点的列表
mybuffer = 64
pts = deque(maxlen=mybuffer)
#打开摄像头
camera = cv2.VideoCapture(0)
#等待两秒
time.sleep(2)
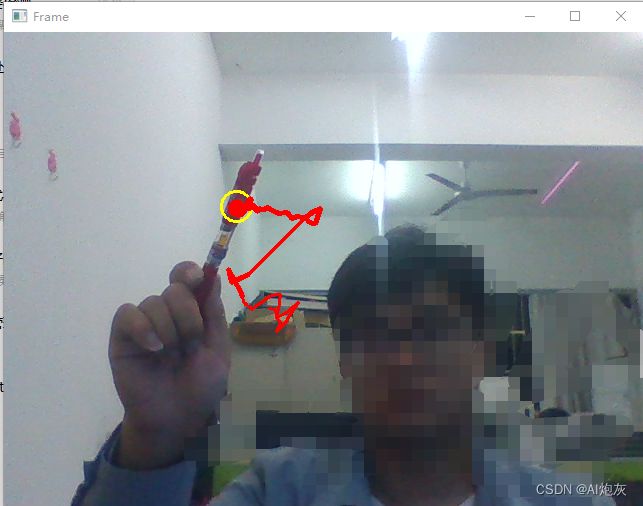
#遍历每一帧,检测红色瓶盖
while True:
#读取帧
(ret, frame) = camera.read()
#判断是否成功打开摄像头
if not ret:
print('No Camera')
break
#frame = imutils.resize(frame, width=600)
#转到HSV空间
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
#根据阈值构建掩膜
mask = cv2.inRange(hsv, redLower, redUpper)
#腐蚀操作
mask = cv2.erode(mask, None, iterations=2)
#膨胀操作,其实先腐蚀再膨胀的效果是开运算,去除噪点
mask = cv2.dilate(mask, None, iterations=2)
#轮廓检测
cnts = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[-2]
#初始化瓶盖圆形轮廓质心
center = None
#如果存在轮廓
if len(cnts) > 0:
#找到面积最大的轮廓
c = max(cnts, key = cv2.contourArea)
#确定面积最大的轮廓的外接圆
((x, y), radius) = cv2.minEnclosingCircle(c)
#计算轮廓的矩
M = cv2.moments(c)
#计算质心
center = (int(M["m10"]/M["m00"]), int(M["m01"]/M["m00"]))
#只有当半径大于10时,才执行画图
if radius > 10:
cv2.circle(frame, (int(x), int(y)), int(radius), (0, 255, 255), 2)
cv2.circle(frame, center, 5, (0, 0, 255), -1)
#把质心添加到pts中,并且是添加到列表左侧
pts.appendleft(center)
#遍历追踪点,分段画出轨迹
for i in range(1, len(pts)):
if pts[i - 1] is None or pts[i] is None:
continue
#计算所画小线段的粗细
thickness = int(np.sqrt(mybuffer / float(i + 1)) * 2.5)
#画出小线段
cv2.line(frame, pts[i - 1], pts[i], (0, 0, 255), thickness)
#res = cv2.bitwise_and(frame, frame, mask=mask)
cv2.imshow('Frame', frame)
#键盘检测,检测到esc键退出
k = cv2.waitKey(5)&0xFF
if k == 27:
break
#摄像头释放
camera.release()
#销毁所有窗口
cv2.destroyAllWindows()