Generalized Focal Loss:Focal loss魔改以及预测框概率分布,保涨点 | NeurIPS 2020
为了高效地学习准确的预测框及其分布,论文对Focal loss进行拓展,提出了能够优化连续值目标的Generalized Focal loss,包含Quality Focal loss和Distribution Focal loss两种具体形式。QFL用于学习更好的分类分数和定位质量的联合表示,DFL通过对预测框位置进行general分布建模来提供更多的信息以及准确的预测。从实验结果来看,GFL能够所有one-stage检测算法的性能
来源:晓飞的算法工程笔记 公众号
论文: Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection
- 论文地址:https://arxiv.org/abs/2006.04388
- 论文代码:https://github.com/implus/GFocal
Introduction
目前,dense detector(one-stage)是目标检测中的主流方向,论文主要讨论其中的两个做法:
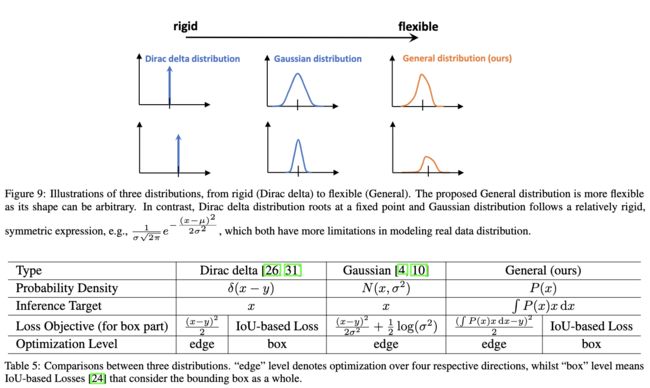
- 预测框的表示方法(representation):可认为是网络对预测框位置的输出,常规方法将其建模为简单的Dirac delta分布,即直接输出位置结果。而有的方法将其建模为高斯分布,输出均值和方差,分别表示位置结果和位置结果的不确定性,提供额外的信息。
- 定位质量估计:最近一些研究增加了额外的定位质量预测,比如IoU-Net加入了IoU分数的预测和FCOS加入了centerness分数的预测,最后将定位质量以及分类分数合并为最终分数。
经过分析,论文发现上述的两个做法存在以下问题:
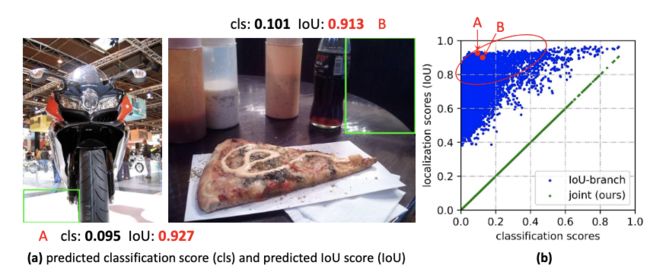
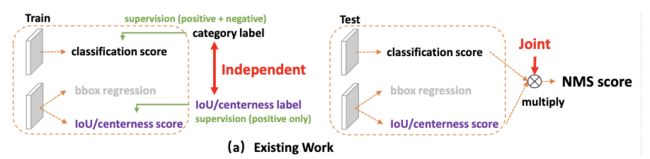
- 定位质量估计和分类分数实际不兼容:首先,定位质量估计和分类分数通常是独立训练的,但在推理时却合并使用。其次,定位质量估计只使用正样本点进行训练,导致负样本点可能估计了高定位质量,这种训练和测试的差异会降低检测的性能。
- 预测框表示方法不够灵活:大多算法将其建模为Dirac delta分布,这种做法没有考虑数据集中的歧义和不确定部分,只知道结果,不知道这个结果靠不靠谱。虽然有的方法将其建模为高斯分布,但高斯分布太简单粗暴了,不能反映预测框的真实分布。
为了解决上面的两个问题,论文分别提出了解决的策略:

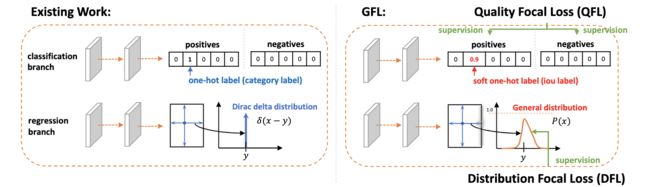
- 对于定位质量估计,论文将其直接与分类分数进行合并,保留类别向量,每个类别的分数的含义变为与GT的IoU。另外,使用这种方式能够同时对正负样本进行训练,不会再有训练和测试的差异。
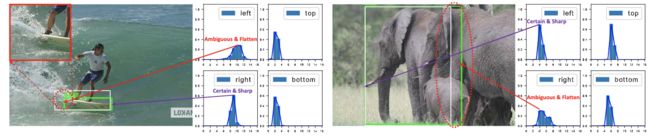
- 对于预测框的表示方法,使用general的分布进行建模,不再强加任何的约束,不仅能够获得可靠和准确的预测结果,还能感知其潜在的真实分布情况。如上图所示,对于存在歧义或不确定的边界,其分布会表现为较平滑的曲线,否则,其分布会表示为尖锐的曲线。
实际上,使用上述提到的两种策略会面临优化的问题。在常规的one-stage检测算法中,分类分支都使用Focal loss进行优化,而Focal loss主要针对离散的分类标签。在论文将定位质量与分类分数结合后,其输出变为类别相关的连续的IoU分数,不能直接使用Focal loss。所以论文对Focal loss进行拓展,提出了GFL(Generalized Focal Los),能够处理连续值目标的全局优化问题。GFL包含QFL(Quality Focal Los)和DFL( Distribution Focal Los)两种具体形式,QFL用于优化难样本同时预测对应类别的连续值分数,而DFL则通过对预测框位置进行general分布的建模来提供更多的信息以及准确的位置预测。
总体而言,GFL有以下优点:
- 消除额外的质量估计分支在训练和测试时的差异,提出简单且高效的联合预测策略。
- 很好地对预测框的真实分布进行灵活建模,提供更多的信息以及准确的位置预测。
- 在引入额外开销的情况下,能够提升所有one-stage检测算法的性能。
Method
Focal Loss (FL)
FL主要用于解决one-stage目标检测算法中的正负样本不平衡问题:
![]()
包含标准的交叉熵部分 − l o g ( p t ) -log(p_t) −log(pt)以及缩放因子部分 ( 1 − p t ) γ (1-p_t)^{\gamma} (1−pt)γ,缩放因子会自动将容易样本降权,让训练集中于难样本。
Quality Focal Loss (QFL)
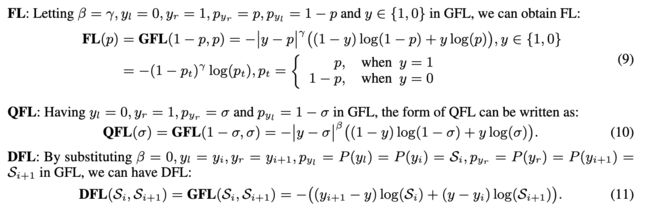
由于FL仅支持离散标签,为了将其思想应用到分类与定位质量结合的连续标签,对其进行了扩展。首先将交叉熵部分 − l o g ( p t ) -log(p_t) −log(pt)扩展为完整形式 − ( ( 1 − y ) l o g ( 1 − σ ) + y l o g ( σ ) ) -((1-y)log(1-\sigma) + y\ log(\sigma)) −((1−y)log(1−σ)+y log(σ)),其次将缩放因子 ( 1 − p t ) γ (1-p_t)^{\gamma} (1−pt)γ泛化为预测值 σ \sigma σ与连续标签 y y y的绝对差值 ∣ y − σ ∣ β |y-\sigma|^{\beta} ∣y−σ∣β,将其组合得到QFL:
![]()
σ = y \sigma=y σ=y为QFL的全局最小解。
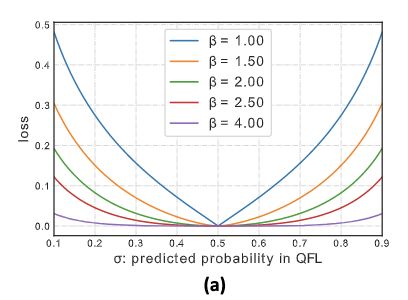
缩放因子的超参数 β \beta β用于控制降权的速率,表现如上图所示,假定目标连续标签 y = 0.5 y=0.5 y=0.5,距离标签越远产生的权重越大,反之则趋向于0,跟FL类似。
Distribution Focal Loss (DFL)
论文跟其它one-stage检测算法一样,将当前位置到目标边界的距离作为回归目标。常规的方法将回归目标 y y y建模为Dirac delta分布,Dirac delta分布满足 ∫ − ∞ + ∞ δ ( x − y ) d x = 1 \int^{+\infty}_{-\infty}\delta(x-y)dx=1 ∫−∞+∞δ(x−y)dx=1,可通过积分的形式求得标签 y y y:
![]()
如前面说到的,这种方法没有体现预测框的真实分布,不能提供更多的信息,所以论文打算将其表示为general的分布 P ( x ) P(x) P(x)。给定标签 y y y的取值范围 [ y 0 , y n ] [y_0, y_n] [y0,yn],可像Dirac delta分布那样从建模的genreal分布得到预测值 y ^ \hat{y} y^:
![]()
为了与神经网络兼容,将连续区域 [ y 0 , y n ] [y_0, y_n] [y0,yn]的积分变为离散区域 { y 0 , y 1 , ⋯ , y i , y i + 1 , ⋯ , y n − 1 , y n } \{y_0, y_1, \cdots, y_i, y_{i+1}, \cdots, y_{n-1}, y_n \} {y0,y1,⋯,yi,yi+1,⋯,yn−1,yn}的积分,离散区域的间隔 Δ = 1 \Delta=1 Δ=1,预测值 y ^ \hat{y} y^可表示为:

P ( x ) P(x) P(x)可通过softmax操作 S ( ⋅ ) \mathcal{S}(\cdot) S(⋅)获得,标记为 S i \mathcal{S}_i Si,预测值 y ^ \hat{y} y^可使用常规的方法进行后续的end-to-end学习,比如Smooth L1、IoU loss和GIoU Loss。
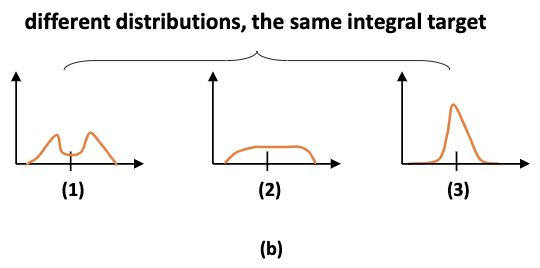
但实际上,同一个积分结果 y y y可由多种不同分布所得,会降低网络学习的效率。考虑到更多的分布应该集中于回归目标 y y y的附近,论文提出DFL来强制网络提高最接近 y y y的 y i y_i yi和 y i + 1 y_{i+1} yi+1的概率,由于回归预测不涉及正负样本不平衡的问题,所以DFL仅需要交叉熵部分:
![]()
DFL的全局最优解为 S i = y i + 1 − y y i + 1 − y i \mathcal{S}_i=\frac{y_{i+1}-y}{y_{i+1}-y_i} Si=yi+1−yiyi+1−y, S i + 1 = y − y i y i + 1 − y i \mathcal{S}_{i+1}=\frac{y - y_i}{y_{i+1}-y_i} Si+1=yi+1−yiy−yi,使得 y ^ \hat{y} y^无限接近于标签 y y y。
Generalized Focal Loss (GFL)
QFL和DFL可统一地表示为GFL,假定值 y l y_l yl和 y r y_r yr的预测概率分别为 p y l p_{y_l} pyl和 p y r p_{y_r} pyr,最终的预测结果为 y ^ = y l p y l + y r p y r \hat{y}=y_l p_{y_l}+y_r p_{y_r} y^=ylpyl+yrpyr,GT标签为 y y y,满足 y l ≤ y ≤ y r y_l \le y \le y_r yl≤y≤yr,将 ∣ y − y ^ ∣ β |y-\hat{y}|^{\beta} ∣y−y^∣β作为缩放因子,GFL的公式为:
![]()
GFL的全局最优在 p y l ∗ = y r − y y r − y l p^{*}_{y_l}=\frac{y_r-y}{y_r-y_l} pyl∗=yr−ylyr−y, p y r ∗ = y − y l y r − y l p^{*}_{y_r}=\frac{y-y_l}{y_r-y_l} pyr∗=yr−yly−yl。
FL、QFL和DFL均可认为是GFL的特殊情况。使用GFL后,与原来的方法相比有以下不同:
- 分类分支的输出直接用于NMS,不用再进行两分支输出合并的操作
- 回归分支对预测框的每个位置的预测,从原来的输出单个值变为输出 n + 1 n+1 n+1个值
在使用GFL后,网络损失 L \mathcal{L} L变为:
![]()
L B \mathcal{L}_{\mathcal{B}} LB为GIoU损失
Experiment
性能对比。

对比实验。
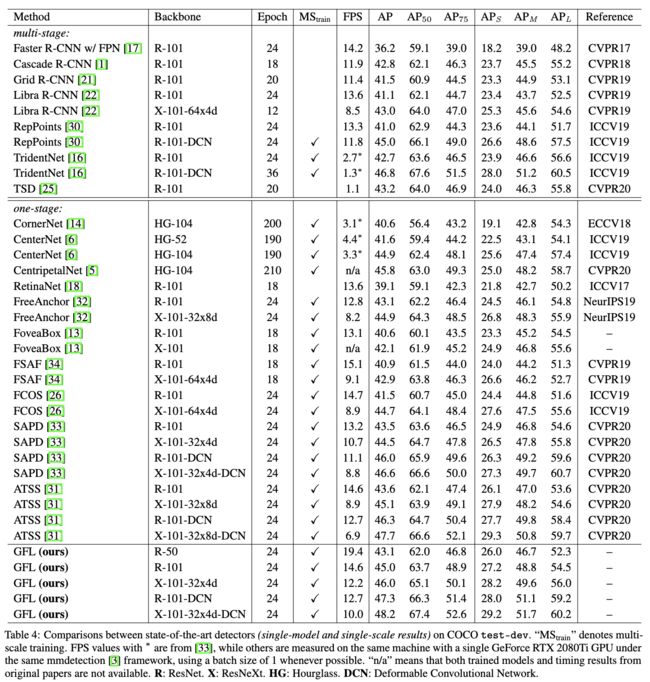
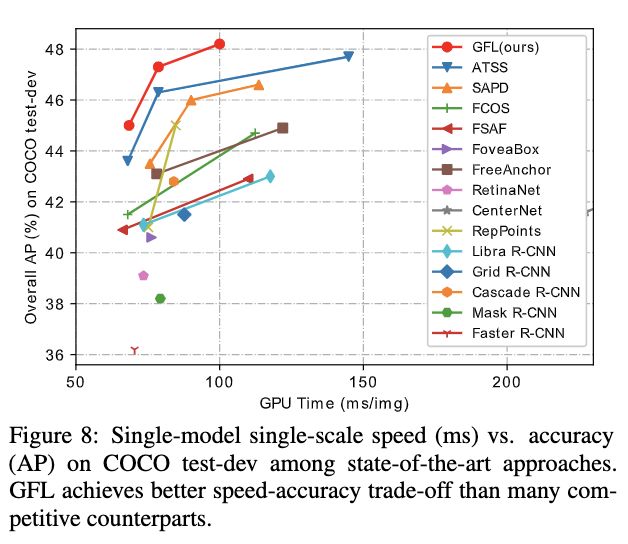
基于ATSS与SOTA算法进行对比。
Conclusion
为了高效地学习准确的预测框及其分布,论文对Focal loss进行拓展,提出了能够优化连续值目标的Generalized Focal loss,包含Quality Focal loss和Distribution Focal loss两种具体形式。QFL用于学习更好的分类分数和定位质量的联合表示,DFL通过对预测框位置进行general分布建模来提供更多的信息以及准确的预测。从实验结果来看,GFL能够所有one-stage检测算法的性能。
如果本文对你有帮助,麻烦点个赞或在看呗~
更多内容请关注 微信公众号【晓飞的算法工程笔记】
