源码看CAF的线程调度框架
序
本篇文章带着大家来看下CAF(C++ Actor Framwwork)的调度框架,也是算现阶段C++比较成熟的调度框架,大家如果自己完成一个比较大型的项目,任务调度也可以参照CAF。
鉴于篇幅较长,大家如果学习使用如何使用CAF可以参照 http://purecpp.cn/detail?id=2237 内容,如果想要直接学习调度框架,可以直接跳转到任务调度小节。
关于CAF用法
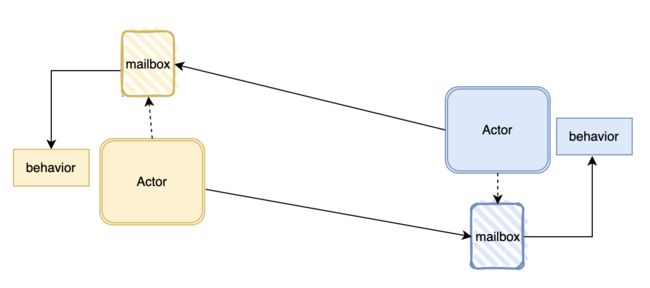
简单说一下CAF的用法或者说一个调用模型,它里边比较关键的概念是Actor,翻译过来就是角色,每个Actor中有beavior(行为)这个概念,beavior里边就是这个角色会做的事情(也就是一个函数)。Actor是基本的计算单元和通信的单元,两个actor相互通信,actor执行自己的behavior。如图所示:
再来看下官方的使用例子,我删了下注释:
using namespace caf;
behavior mirror(event_based_actor* self) {
return {
[=](const std::string& what) -> std::string {
aout(self) << what << std::endl;
return std::string{what.rbegin(), what.rend()};
},
};
}
void hello_world(event_based_actor* self, const actor& buddy) {
self->request(buddy, std::chrono::seconds(10), "Hello World!")
.then(
[=](const std::string& what) {
aout(self) << what << std::endl;
});
}
void caf_main(actor_system& sys) {
// create a new actor that calls 'mirror()'
auto mirror_actor = sys.spawn(mirror);
// create another actor that calls 'hello_world(mirror_actor)';
sys.spawn(hello_world, mirror_actor);
// the system will wait until both actors are done before exiting the program
}
CAF_MAIN()
我这里帮着大家顺一下这段代码:
- 函数入口在CAF_MAIN宏中,主要是做一些初始化工作,和我们主题相关的是会创建actor_system对象并调用caf_main函数。
- 然后caf_main中调用sys.spawn会创建出来一个actor,我们看mirror_actor的behavior,是在mirror函数中return了一个behavior对象,也就是spawn会调用mirror函数并获得了behavior,然后创建了actor对象。
- 再下一个spawn函数调用hello_world,传入mirror_actor对象,对应于buddy参数,并执行request函数,request传入buddy参数,表示会调用buddy的behavior函数,根据函数参数去找,,request参数的第二个表示该函数的超时时间,第三个之后才是要调用buddy这个actor的behavior的函数参数,那么这里正好可以调用到mirror_actor的behavior,当behavior返回时会自动执行then这个函数。
- 最后整体的执行顺序就是,sys调用spawn创建拥有behavior的actor对象mirror_actor, 第二个spawn会创建出来第二个actor对象,并调用自己的request函数向另外一个actor发送调用信息,也即会调用buddy的bahavior,调用behavior后执行then函数,整体结束。
调度器启动(初始化)
首先调度器的构造或者说初始化是在actor_system的构造函数进行:
// actor_system.cpp
actor_system::actor_system(actor_system_config& cfg) {
// ...
auto& sched = modules_[module::scheduler];
using namespace scheduler;
using policy::work_sharing;
using policy::work_stealing;
using share = coordinator;
using steal = coordinator;
if (!sched) {
enum sched_conf {
stealing = 0x0001,
sharing = 0x0002,
testing = 0x0003,
};
sched_conf sc = stealing;
namespace sr = defaults::scheduler;
auto sr_policy = get_or(cfg, "caf.scheduler.policy", sr::policy);
if (sr_policy == "sharing")
sc = sharing;
else if (sr_policy == "testing")
sc = testing;
else if (sr_policy != "stealing")
std::cerr << "[WARNING] " << deep_to_string(sr_policy)
<< " is an unrecognized scheduler pollicy, "
"falling back to 'stealing' (i.e. work-stealing)"
<< std::endl;
switch (sc) {
default: // any invalid configuration falls back to work stealing
sched.reset(new steal(*this));
break;
case sharing:
sched.reset(new share(*this));
break;
case testing:
sched.reset(new test_coordinator(*this));
}
}
// ...
}
调度器的对象是从modules_这个数组中取出,我们看下module是什么:
// actor_system.hpp
class CAF_CORE_EXPORT actor_system {
// ...
class CAF_CORE_EXPORT module {
public:
enum id_t {
scheduler,
middleman,
openssl_manager,
network_manager,
num_ids
};
virtual ~module();
const char* name() const noexcept;
virtual void start() = 0;
virtual void stop() = 0;
virtual void init(actor_system_config&) = 0;
virtual id_t id() const = 0;
virtual void* subtype_ptr() = 0;
};
// ...
};
module会提供一些公共接口,init,start,stop等等之类的。我们也看到调度器是属于module的。
然后再回到创建调度器那里,最开始调度器是没有的,然后可以看的出来有三种调度配置,steal(偷取任务),share(共享任务),test(测试模式),我们就忽略测试模式。截止到switch那里,我们知道从配置文件中读取到调度的配置是什么,就去创建相应的调度器。那么调度器的类就是coordinator,work_sharing和work_stealing分别是不同调度配置的实现类,coordinator传入模版参数为调度的策略类(work_sharing和work_stealing)来实现调度器的全部功能。
然后继续往下继续看,目前已经有了调度器的创建,我们大致看下实现调度器共的类大体继承关系:
// coordinator.hpp
template
class coordinator : public abstract_coordinator {
// ...
};
// abstract_coordinator.hpp
class CAF_CORE_EXPORT abstract_coordinator : public actor_system::module {
// ...
};
coordinator继承abstract_coordinator,abstract_coordinator然后继承actor_system::module,这就和我们上边说的调度器属于module联系上了。
然后我们继续回到actor_system继续往下走:
// actor_system.cpp
actor_system::actor_system(actor_system_config& cfg) {
// ...
for (auto& mod : modules_)
if (mod)
mod->init(cfg);
// ...
}
这里我们看到会调用调度器实现类的init函数,init函数是由abstract_coordinator类实现:
// abstract_coordinator.cpp
void abstract_coordinator::init(actor_system_config& cfg) {
namespace sr = defaults::scheduler;
max_throughput_ = get_or(cfg, "caf.scheduler.max-throughput",
sr::max_throughput);
num_workers_ = get_or(cfg, "caf.scheduler.max-threads",
default_thread_count());
}
这里实现比较简单,就是从配置获取最大吞吐量(max_throughput_)和worker的数量,worker的数量默认是线程个数。
继续看actor_system构造函数:
// actor_system.cpp
actor_system::actor_system(actor_system_config& cfg) {
// ...
for (auto& mod : modules_)
if (mod)
mod->start();
// ...
}
这里就是会调用到coordinator的start函数:
// coordinator.hpp
template
class coordinator : public abstract_coordinator {
// ...
using worker_type = worker;
void start() override {
// Create initial state for all workers.
typename worker_type::policy_data init{this};
// Prepare workers vector.
auto num = num_workers();
workers_.reserve(num);
// Create worker instances.
for (size_t i = 0; i < num; ++i)
workers_.emplace_back(
std::make_unique(i, this, init, max_throughput_));
// Start all workers.
for (auto& w : workers_)
w->start();
// ...
}
// ...
}
首先获取到worker个数,然后来构造worker放置到workers_的数据结构中。然后调用worker的start函数。我们进入到worker类中去看看顺便看下它的start函数:
// worker.hpp
template
class worker : public execution_unit {
public:
using coordinator_ptr = coordinator*;
using policy_data = typename Policy::worker_data;
worker(size_t worker_id, coordinator_ptr worker_parent,
const policy_data& init, size_t throughput)
: execution_unit(&worker_parent->system()),
max_throughput_(throughput),
id_(worker_id),
parent_(worker_parent),
data_(init) {
// nop
}
void start() {
CAF_ASSERT(this_thread_.get_id() == std::thread::id{});
this_thread_ = system().launch_thread("caf.worker", thread_owner::scheduler,
[this] { run(); });
}
// ...
};
首先构造函数是传入吞吐量,id,coordinator和policy_data对象。然后当调用start函数时其实就是开启了一个线程执行run函数,那也就是说每个worker其实就是开启一个线程来执行任务而已。再去看下run函数:
// worker.hpp
template
class worker : public execution_unit {
// ...
private:
void run() {
// scheduling loop
for (;;) {
auto job = policy_.dequeue(this);
policy_.before_resume(this, job);
auto res = job->resume(this, max_throughput_);
policy_.after_resume(this, job);
switch (res) {
case resumable::resume_later: {
policy_.resume_job_later(this, job);
break;
}
case resumable::done: {
policy_.after_completion(this, job);
intrusive_ptr_release(job);
break;
}
case resumable::awaiting_message: {
intrusive_ptr_release(job);
break;
}
case resumable::shutdown_execution_unit: {
policy_.after_completion(this, job);
policy_.before_shutdown(this);
return;
}
}
}
}
Policy policy_;
// ...
};
我省略了下代码,后边还会回来看。run函数主要就是做几件事,从Policy中获取一个job,执行job(job->resume), 然后判断结果做出不同的行为,这里要说一下的是当执行完job,返回结果时resumable::resume_later时,会继续将这个job丢入到队列中,之后某个时刻会再次调用到这个job
以上就是整个调度器的初始化过程,首先actor_system的构造函数中会根据不同调度策略,创建调度器类(coordinator
actor的创建
我们的例子中CAF创建actor通过actor_system的spawn函数来创建一个actor,简单看下创建的actor的过程:
// actor_system.hpp
infer_handle_from_fun_t spawn(F fun, Ts&&... xs) {
using impl = infer_impl_from_fun_t;
check_invariants();
static constexpr bool spawnable = detail::spawnable();
static_assert(spawnable,
"cannot spawn function-based actor with given arguments");
actor_config cfg;
return spawn_functor(detail::bool_token{}, cfg, fun,
std::forward(xs)...);
}
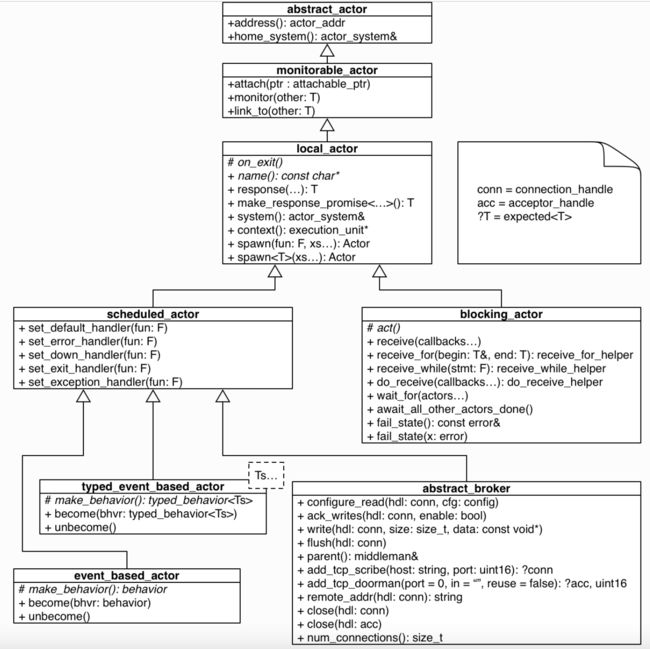
infer_handle_from_fun_t这个我们跟踪进去会发现是actor这个类型,函数内容的第一行的impl是event_based_actor,spawn_functor函数就会创建actor并把相应的的behavior保存下来。然后太多这里先不管关注了,这里大家需要理解的是有两个点,第一个我们这里会创建一个event_based_actor对象,然后使用actor对象来接收并返回,那也就是说CAF的actor中使用actor_control_block对象来持有创建出来的对象,因为创建出来有可能是别的actor类型,那看下所有类型的actor的类图:
第二个点是event_based_actor创建behavior是会调用到event_based_actor的make_behavior函数:
// event_based_actor.cpp
void event_based_actor::initialize() {
// ...
auto bhvr = make_behavior();
if (bhvr) {
become(std::move(bhvr));
}
}
behavior event_based_actor::make_behavior() {
behavior res;
if (initial_behavior_fac_) {
res = initial_behavior_fac_(this);
initial_behavior_fac_ = nullptr;
}
return res;
}
后调用become函数,最终会调用到他的父类scheduled_actor的do_become函数;
// scheduled_actor.cpp
void scheduled_actor::do_become(behavior bhvr, bool discard_old) {
// ...
if (bhvr)
bhvr_stack_.push_back(std::move(bhvr));
// ...
}
这里可以看到会讲behavior放置到scheduled_actor的bhvr_stack_这个成员变量里。
任务调度
创建一个任务
我们上边也看到event_based_actor是继承scheduled_actor这个类,但是实际的继承看起来还有有点绕的:
// event_based_actor.hpp
class CAF_CORE_EXPORT event_based_actor
: public extend::
with {
// ...
};
这里看到实际上event_based_actor继承extend的with类型,最后大家会发现实际是继承mixin::sender,mixin::requester,mixin::subscriber,mixin::behavior_changer,这四个类型,这四个类型又继承scheduled_actor,这段代码还是有点意思,大家可以去实际去看下。
然后我们回到我们最初的例子,会通过event_based_actor的request函数调用到另外一个actor的behavior里。正好我们request函数是在继承的mixin::requester类里:
// requester.hpp
auto request(const Handle& dest, timeout, Ts&&... xs) {
// ...
auto self = static_cast(this);
auto req_id = self->new_request_id(P);
auto pending_msg = disposable{};
if (dest) {
detail::profiled_send(self, self->ctrl(), dest, req_id, {},
self->context(), std::forward(xs)...);
pending_msg = self->request_response_timeout(timeout, req_id);
} else {
//...
}
using response_type
= response_type_t>...>;
using handle_type
= response_handle>;
return handle_type{self, req_id.response_id(), std::move(pending_msg)};
}
生成一个req_id,通过profiled_send发送消息到另外一个actor,并返回response_type。我们后边会调用then函数,也即调用response_type的then,最终会调用到scheduled_actor的add_multiplexed_response_handler函数中:
// scheduled_actor.cpp
void scheduled_actor::add_multiplexed_response_handler(message_id response_id, behavior bhvr) {
if (bhvr.timeout() != infinite)
request_response_timeout(bhvr.timeout(), response_id);
multiplexed_responses_.emplace(response_id, std::move(bhvr));
}
可以看到会把then后边的函数存放在multiplexed_responses_,与response_id相对应。那这里大家应该可以猜到,是发送消息的actor收到回应就会调用到这个函数。
让我们回过头看下profiled_send函数会做什么:
// profiled_send.hpp
void profiled_send(Self* self, SelfHandle&& src, const Handle& dst,
message_id msg_id, std::vector stages,
execution_unit* context, Ts&&... xs) {
if (dst) {
auto element = make_mailbox_element(std::forward(src), msg_id, std::move(stages), std::forward(xs)...);
dst->enqueue(std::move(element), context);
} else {
// ...
}
}
首先通过make_mailbox_element构造一个message,然后就是直接放到dst的enqueue函数,也把消息放置在目的actor的队列里。
同样这个函数依然是调用到scheduled_actor的enqueue函数。
// scheduled_actor.cpp
bool scheduled_actor::enqueue(mailbox_element_ptr ptr, execution_unit* eu) {
// ...
auto mid = ptr->mid;
auto sender = ptr->sender;
// ...
switch (mailbox().push_back(std::move(ptr))) {
case intrusive::inbox_result::unblocked_reader: {
// ...
if (private_thread_)
private_thread_->resume(this);
else if (eu != nullptr)
eu->exec_later(this);
else
// ...
return true;
}
case intrusive::inbox_result::success:
return true;
default: { // intrusive::inbox_result::queue_closed
// ...
return false;
}
}
}
这里稍微有点复杂,首先就是需要把message放到scheduled_actor的信箱里,这个信箱也是scheduled_actor的成员,然后会返回结果。
需要比对下返回结果,unblocked_reader的意思是actor未被调度执行behavior,最开始actor没有任务执行那肯定是这样的。success就是表明actor现在正在执行其他的behavior然后直接返回true就可以了。
那为什么要这样区分呢,我们看下没有actor没有调度执行behavior这条分支后边会做什么。首先如果scheduled_actor有自己的私有的线程,一般都是没有的,这里不是重点。然后看下eu是execution_unit对象,那么这个execution_unit是什么呢,大家看代码就会发现execution_unit是被worker继承的。篇幅原因我省略了一些代码讲解,我直接说下原理,当actor在创建的时候会设定下他的上下文(ctx)是某个worker,而这里eu其实是发送方actor的上下文(ctx),也就是worker。这里eu就是worker,我们直接定位到函数:
void exec_later(job_ptr job) override {
policy_.internal_enqueue(this, job);
}
这里其实很关键,我们能发现worker最终消费的job其实是actor,然后把job也就是actor会放到policy的队列中。
现在我们知道为什么消息放到信箱中后需要区分现在actor的状态了,如果actor现在没有执行behavior,需要将actor放到队列中被调度执行,如果现在actor正在执行behavior那么不用管,把message放到信箱里,actor执行完当前的behavior,自然会从信箱拿出新的message从而去执行相应的behavior。
任务调度执行
这一小节算是这篇文章的重点了,限于一些CAF的概念不得不讲了前边很大的一坨。
到目前为止我们明白了actor是被worker调度执行的单元,且actor是存放在policy的队列中。然后被worker消费并执行actor的behavior。
我们钱包讲到了policy其实是有两种,share和steal,顾名思义就是一种是各个policy的任务是共享的,另外一种是一个policy会去别的policy去偷任务执行。具体代码是怎样的呢?我们来看下两个policy的入队列和出队列的函数;
先看worker_stealing这个类的函数:
// worker_stealing.hpp
template
void internal_enqueue(Worker* self, resumable* job) {
d(self).queue.prepend(job);
}
入队列的函数很简单,仅仅是将job放到self(worker)的worker_data中的队列中。
// worker_stealing.hpp
template
resumable* dequeue(Worker* self) {
// ...
auto* job = d(self).queue.try_take_head();
if (job)
return job;
for (size_t k = 0; k < 2; ++k) { // iterate over the first two strategies
for (size_t i = 0; i < strategies[k].attempts;
i += strategies[k].step_size) {
// try to steal every X poll attempts
if ((i % strategies[k].steal_interval) == 0) {
job = try_steal(self);
if (job)
return job;
}
// wait for some work to appear
job = d(self).queue.try_take_head(strategies[k].sleep_duration);
if (job)
return job;
}
}
// ...
}
template
resumable* try_steal(Worker* self) {
auto p = self->parent();
if (p->num_workers() < 2) {
return nullptr;
}
// roll the dice to pick a victim other than ourselves
auto victim = d(self).uniform(d(self).rengine);
if (victim == self->id())
victim = p->num_workers() - 1;
return d(p->worker_by_id(victim)).queue.try_take_tail();
}
简单理解下,当self(worker调用policy的dequeue函数取数据传入worker对象指针)的worker_data的队列中有数据就会从该队列中取得数据,当自己的队列中没有后且满足某些策略后调用try_steal去偷取别的worker下的worker_data的任务。利用worker的parent获取到其他的worker,然后再从其worker_data的队尾取出数据,worker的parent就是调度器的类coodinator,coodinator会持有所有的worker的对象。
接下来看work_sharing的相关函数:
//work_sharing.hpp
template
bool enqueue(Coordinator* self, resumable* job) {
queue_type l;
l.push_back(job);
std::unique_lock guard(d(self).lock);
d(self).queue.splice(d(self).queue.end(), l);
d(self).cv.notify_one();
return true;
}
template
resumable* dequeue(Worker* self) {
auto& parent_data = d(self->parent());
std::unique_lock guard(parent_data.lock);
parent_data.cv.wait(guard, [&] { return !parent_data.queue.empty(); });
resumable* job = parent_data.queue.front();
parent_data.queue.pop_front();
return job;
}
share模式的policy就比较简单,入队列就是将数据放置在coordinator的队列中,然后出队列取数据时,多个worker从其parent也就是coordinator的队列获取数据并返回。
让我们再次回到worker的执行体中:
// worker.hpp
void run() {
CAF_SET_LOGGER_SYS(&system());
// scheduling loop
for (;;) {
auto job = policy_.dequeue(this);
policy_.before_resume(this, job);
auto res = job->resume(this, max_throughput_);
policy_.after_resume(this, job);
//...
}
}
关键点是我们会从policy调用dequeue函数,传入参数this,然后获取到job,也就是actor,然后调用actor的resume就可以执行相应的behavior了。
我们也简单过一下resume函数:
// scheduled_actor.cpp
resumable::resume_result scheduled_actor::resume(execution_unit* ctx, size_t max_throughput) {
// ...
auto handle_async = [this, max_throughput, &consumed](mailbox_element& x) {
return run_with_metrics(x, [this, max_throughput, &consumed, &x] {
switch (reactivate(x)) {
// ...
}
});
};
while (consumed < max_throughput) {
mailbox_.fetch_more();
auto& hq = get_urgent_queue();
auto& nq = get_normal_queue();
if (hq.new_round(quantum * 3, handle_async).consumed_items > 0) {
nq.flush_cache();
}
if (nq.new_round(quantum, handle_async).consumed_items > 0) {
hq.flush_cache();
}
auto delta = consumed - prev;
if (delta > 0) {
// ...
} else {
reset_timeouts_if_needed();
if (mailbox().try_block())
return resumable::awaiting_message;
}
}
// ...
}
我只列了下重要的代码,handle_async是实际上会执行behavior的地方,首先mailbox_执行fetch_more会标注mailbox_中可以被消费的消息,然后hq和nq会相继取出消息去调用handle_async执行behavior,最后消费完全后,会使得mailbox设定其状态为block,也就是我们前边说到的actor会认为时当前没有behavior正在执行。
总结
这里来总结下CAF这个是如何调度任务的:
- 首先调度器(coordinator)会被初始化,调度器初始化多个worker,每个worker则为单独运行在一个线程上,然后worker获取任务会有两个policy来选择,共享模式和偷窃模式,共享模式是多个worker共享coordinator中的队列,偷窃模式是当一个worker使用完自己的队列就会去偷取别的worker的队列中的任务。
- 关于CAF特有的则是,创建任务时将消息直接放到actor的信箱里,将actor放到worker的队列中,当worker消费actor并调用其resume函数,actor就可以执行所有的从信箱中获取所有的消息所匹配的behavior。
ref
https://actor-framework.readthedocs.io/en/stable/index.html
http://purecpp.cn/detail?id=2237
https://github.com/actor-framework/actor-framework