FasterRCNN模型损失——pytorch实现
论文传送门:Faster R-CNN: Towards Real-Time ObjectDetection with Region Proposal Networks、Fast R-CNN
FasterRCNN的损失:
①RPN损失:根据anchor和RPN输出的scores和regs计算所得,使网络更好的根据scores和regs对anchor进行调整,得到proposals。
RPN损失由分类损失 L c l s L_{cls} Lcls和回归损失 L r e g L_{reg} Lreg构成, L c l s L_{cls} Lcls使用BCE损失函数计算, L r e g L_{reg} Lreg使用smooth L1损失函数计算。
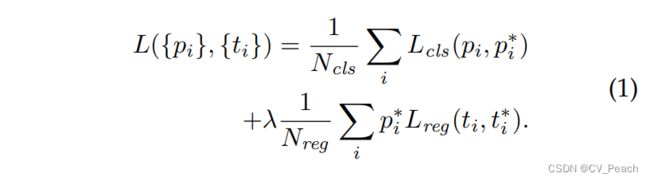
式中, N c l s N_{cls} Ncls代表选取anchor样本数,设为512, N r e g N_{reg} Nreg为anchor的位置个数,约为2400, λ λ λ取10,从而对公式进行简化,将两个损失的系数项去掉。
②RCNN损失:根据proposals和Head输出的scores和regs计算所得,使网络更好的根据scores和regs对proposals进行调整,得到最终的cls和bbox。
RCNN损失由分类损失 L c l s L_{cls} Lcls和回归损失 L l o c L_{loc} Lloc构成, L c l s L_{cls} Lcls使用CE损失函数计算, L l o c L_{loc} Lloc使用smooth L1损失函数计算。

式中, [ u ≥ 1 ] [u≥1] [u≥1]为艾弗森括号。
回归参数计算公式:
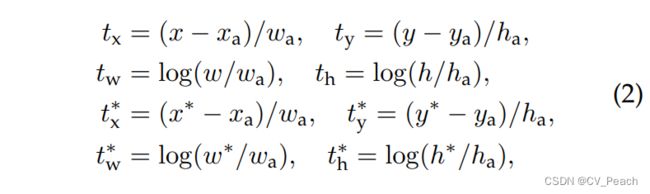
式中, x x x表示预测box, x a x_a xa表示anchor box, x ∗ x^* x∗表示ground truth box( y y y, w w w, h h h同理)。
import torch
import torch.nn.functional as F
from torchvision.models import vgg16
from model import RegionProposalNetwork, Head, FasterRCNN
def cal_iou(box1, box2):
"""
计算两个box之间的iou
:param box1: tensor (N1, 4) (xmin, ymin, xmax, ymax)
:param box2: tensor (N2, 4) (xmin, ymin, xmax, ymax)
:return: iou (N1, N2) ∈ [0, 1]
"""
box1_area = torch.prod(box1[:, 2:] - box1[:, :2], dim=-1).unsqueeze(dim=1)
box2_area = torch.prod(box2[:, 2:] - box2[:, :2], dim=-1)
box1 = box1.unsqueeze(dim=1)
xymin = torch.maximum(box1[:, :, :2], box2[:, :2])
xymax = torch.minimum(box1[:, :, 2:], box2[:, 2:])
wh = torch.clamp(xymax - xymin, min=0)
intersection_area = torch.prod(wh, dim=-1)
return intersection_area / (box1_area + box2_area - intersection_area)
def gtbbox2reg(gt_bbox, bbox):
"""
将ground truth bbox根据anchor/roi转化为ground truth回归参数
:param gt_bbox: ground truth bbox (N1, 4) (xmin, ymin, xmax, ymax)
:param bbox:ground truth回归参数 (N1, 4) (dx, dy, dw, dh)
:return:
"""
gtxmin, gtymin, gtxmax, gtymax = map(lambda t: gt_bbox[:, t::4], [0, 1, 2, 3])
gtx = (gtxmin + gtxmax) / 2
gty = (gtymin + gtymax) / 2
gtw = gtxmax - gtxmin
gth = gtymax - gtymin
xmin, ymin, xmax, ymax = map(lambda t: bbox[:, t::4], [0, 1, 2, 3])
x = (xmin + xmax) / 2
y = (ymin + ymax) / 2
w = xmax - xmin
h = ymax - ymin
dx = (gtx - x) / w
dy = (gty - y) / h
dw = torch.log(gtw / w)
dh = torch.log(gth / h)
return torch.cat([dx, dy, dw, dh], dim=-1)
class RPNLoss(object): # RPN LossFunction,针对anchor进行loss计算
def __init__(
self,
num_sample=256, # 采样数量
pos_iou_th=0.7, # 正样本iou阈值(≥)
neg_iou_th=0.3, # 负样本iou阈值(<)
pos_ratio=0.5, # 正样本占全部样本比例
cuda=True
):
self.num_sample = num_sample
self.pos_iou_th = pos_iou_th
self.neg_iou_th = neg_iou_th
self.pos_ratio = pos_ratio
self.cuda = cuda
def cal_loss(self, scores, regs, anchors, gt_bbox):
"""
计算RPN损失(一个batch中的一张图像)
:param scores: tensor(N1, )
:param regs: tensor(N1, 4)
:param anchors: tensor(N1, 4) (xmin, ymin, xmax, ymax)
:param gt_bbox: tensor(N2, 4) (xmin, ymin, xmax, ymax)
:return: Lcls + Lreg
"""
anchor_label = torch.ones_like(scores) * (-1)
iou = cal_iou(anchors, gt_bbox)
_, gt_anchor_index = torch.max(iou, dim=0) # (N2)
anchor_max_iou, anchor_gt_index = torch.max(iou, dim=1) # (N1)
anchor_label[anchor_max_iou >= self.pos_iou_th] = 1
anchor_label[anchor_max_iou < self.neg_iou_th] = 0
anchor_label[gt_anchor_index] = 1
pos_index = torch.where(anchor_label == 1)[0]
neg_index = torch.where(anchor_label == 0)[0]
max_num_pos = int(self.num_sample * self.pos_ratio)
if len(pos_index) > max_num_pos:
pos_index_index = torch.randint(0, len(pos_index), (max_num_pos,))
pos_index = pos_index[pos_index_index]
num_pos = len(pos_index)
num_neg = self.num_sample - num_pos
if len(neg_index) > num_neg:
neg_index_index = torch.randint(0, len(neg_index), (num_neg,))
neg_index = neg_index[neg_index_index]
pred_scores = torch.cat([scores[pos_index], scores[neg_index]], dim=0)
gt_scores = torch.cat([torch.ones(num_pos, dtype=torch.float), torch.zeros(num_neg, dtype=torch.float)], dim=0)
if self.cuda:
gt_scores = gt_scores.cuda()
score_loss = (num_pos + num_neg) * F.binary_cross_entropy(pred_scores, gt_scores)
pred_regs = regs[pos_index]
pos_anchor = anchors[pos_index]
pos_gt_index = anchor_gt_index[pos_index]
pos_gt = gt_bbox[pos_gt_index]
gt_regs = gtbbox2reg(pos_gt, pos_anchor)
reg_loss = num_pos * F.smooth_l1_loss(pred_regs, gt_regs)
return score_loss + reg_loss
class RCNNLoss(object): # RCNN LossFunction,针对proposal进行loss计算
def __init__(
self,
num_sample=128, # 采样数量
pos_iou_th=0.5, # 正样本iou阈值(≥)
neg_iou_th=(0.1, 0.5), # 负样本iou阈值(≥<)
pos_ratio=0.25, # 正样本占全部样本比例
cuda=True
):
self.num_sample = num_sample
self.pos_iou_th = pos_iou_th
self.neg_iou_th = neg_iou_th
self.pos_ratio = pos_ratio
self.cuda = cuda
def cal_loss(self, scores, regs, rois, gt_label, gt_bbox):
"""
计算RCNN损失(一个batch中的一张图像)
:param scores: tensor(N1, num_classes)
:param regs: tensor(N1, 4 * num_classes)
:param rois: tensor(N1, 4) (xmin, ymin, xmax, ymax)
:param gt_label: tensor(N2, num_classes)
:param gt_bbox: tensor(N2, 4) (xmin, ymin, xmax, ymax)
:return: Lcls + Lloc
"""
roi_label = torch.ones(size=(rois.shape[0],)) * (-1)
iou = cal_iou(rois, gt_bbox)
roi_max_iou, roi_gt_index = torch.max(iou, dim=1) # (N1)
roi_label[roi_max_iou >= self.pos_iou_th] = 1
roi_label[(roi_max_iou >= self.neg_iou_th[0]) & (roi_max_iou < self.neg_iou_th[1])] = 0
pos_index = torch.where(roi_label == 1)[0]
neg_index = torch.where(roi_label == 0)[0]
max_num_pos = int(self.num_sample * self.pos_ratio)
if len(pos_index) > max_num_pos:
pos_index_index = torch.randint(0, len(pos_index), (max_num_pos,))
pos_index = pos_index[pos_index_index]
num_pos = len(pos_index)
num_neg = self.num_sample - num_pos
if len(neg_index) > num_neg:
neg_index_index = torch.randint(0, len(neg_index), (num_neg,))
neg_index = neg_index[neg_index_index]
pos_roi = rois[pos_index]
pos_gt_index = roi_gt_index[pos_index]
neg_gt_index = roi_gt_index[neg_index]
pos_gt_label = gt_label[pos_gt_index]
neg_gt_label = gt_label[neg_gt_index]
pred_scores = torch.cat([scores[pos_index, :], scores[neg_index, :]], dim=0)
gt_scores = torch.cat([pos_gt_label, neg_gt_label], dim=0)
if self.cuda:
gt_scores = gt_scores.cuda()
score_loss = (num_pos + num_neg) * F.cross_entropy(pred_scores, gt_scores)
pred_regs = regs[pos_index].view(num_pos, -1, 4)
pred_label_regs = torch.stack([pred_regs[i, pos_gt_label[i], :] for i in range(num_pos)], dim=0)
pos_gt = gt_bbox[pos_gt_index]
gt_regs = gtbbox2reg(pos_gt, pos_roi)
loc_loss = num_pos * F.smooth_l1_loss(pred_label_regs, gt_regs)
return score_loss + loc_loss
if __name__ == "__main__":
cuda = True
backbone = vgg16().features # 选用vgg16的features部分作为FasterRCNN的backbone
batch_size = 8
feature_channels = 512 # vgg16输出的特征层通道数
step = 32 # vgg16输出的特征层与输入图像的步距关系
num_classes = 20 # 目标类别数量(不包括背景)
image_size = (800, 1300) # 输入图像尺寸
rpn = RegionProposalNetwork(feature_channels, step, image_size, cuda=cuda) # 构建rpn
head = Head(num_classes + 1, feature_channels, step) # 构建head
fasterrcnn = FasterRCNN(backbone, rpn, head) # 构建FasterRCNN
data = torch.randn(batch_size, 3, 800, 1300) # 模拟网络输入
if cuda:
data = data.cuda()
fasterrcnn.cuda()
rpn_scores, rpn_regs, anchors, rois, head_scores, head_regs = fasterrcnn(data)
# torch.Size([8, 9000])
# torch.Size([8, 9000, 4])
# torch.Size([9000, 4])
# torch.Size([8, 2000, 4])
# torch.Size([8, 2000, 21])
# torch.Size([8, 2000, 84])
[print(i.shape) for i in [rpn_scores, rpn_regs, anchors, rois, head_scores, head_regs]]
rpnloss_fun = RPNLoss(cuda=cuda) # 构建RPN LossFunction
rcnnloss_fun = RCNNLoss(cuda=cuda) # 构建RCNN LossFunction
for i in range(batch_size): # 对batch里的图像进行循环
# 模拟ground truth bbox 和 ground truth label
gtbbox1 = torch.randint(0, 200, (6, 2))
gtbbox2 = torch.randint(600, 800, (6, 2))
gtbbox = torch.cat([gtbbox1, gtbbox2], dim=-1)
gtlabel = torch.randint(0, num_classes + 2, (6,))
if cuda:
gtbbox = gtbbox.cuda()
gtlabel = gtlabel.cuda()
one_rpn_scores = rpn_scores[i, :]
one_rpn_regs = rpn_regs[i, :]
one_head_scores = head_scores[i, :]
one_head_regs = head_regs[i, :]
one_rois = rois[i, :]
rpnloss = rpnloss_fun.cal_loss(one_rpn_scores, one_rpn_regs, anchors, gtbbox) # 单张图像的RPN损失
rcnnloss = rcnnloss_fun.cal_loss(one_head_scores, one_head_regs, one_rois, gtlabel, gtbbox) # 单张图像的RCNN损失
print(rpnloss)
print(rcnnloss)