【论文解读--PR-MPC控制】(2018)Policy regularized model predictive control framework for robust legged
系列文章目录
提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加
TODO:写完再整理
文章目录
- 系列文章目录
- 前言
- 一、简介
-
- 1.机器人的应用场景
- 2.足式机器人触地检测是一个难点
- 3.足式机器人(步态调度+支撑相力控)是一个难点
- 4.模型简化方法
- 5.预测控制
- 6.本文贡献
- 二、理论与系统建模
-
- 1.运动学模型分析
-
- (1)运动学解耦结构图:
- 2.动力学模型分析
-
- (1)动力学简化的方法
- (2)动力学解耦图
- (3)单刚体动力学模型的表达式
- (4)自由浮动基座的状态更新公式(其实就是机器人躯干轨迹信息,这些状态描述机器人CoM的绝对状态)
- 三、步态规划
-
- 1.小跑步态相序图:用腾空相和支撑相表达
- 2.接触状态转换标志:布尔变量
- 四、预测控制
-
- 1.CoM轨迹预测图
- 2.总体系统控制框架
-
- (1)运动控制器实现的假设条件
- (1)COM路径规划path planning
- (2)步态生成gait generation
- (3)躯干状态估计state estimation
- (4)模型预测控制MPC
-
- 1、简化离散控制模型公式
- 2、PR-MPC公式(MPC优化框架)
- 3、MPC的约束条件
-
- (1)约束1
- (2)约束2
- (3)约束3
- (4)约束4
- (5)动力学控制(机器人动力学解算)robot dynamics
-
- 1、反作用力f、脚的位置与关节力矩输出的关系
- 2、每条腿在驱动质心的坐标系上表示的反作用力和每条腿对应关节的输出力矩的关系
- (6)足迹轨迹预测公式
- 总结
前言
认知有限,望大家多多包涵,有什么问题也希望能够与大家多交流,共同成长!本文先对策略正则模型预测控制PR-MPC鲁棒腿运动的框架做个简单的介绍,具体内容后续再更,其他模块可以参考去我其他文章
提示:以下是本篇文章正文内容

一、简介
1.机器人的应用场景
许多陆地机器人受其运动能力的限制,在很适合取代人类的情况下,无法提供协助响应者
早期机器人领域的大部研究都集中在开发高精度,【防盗标记–盒子君hzj】单任务机器的重复运动控制环境,如装配线。这些机器人可以避开环境互动和执行预先计划的,结构化的动作。
1、救灾
2、军事监视
3、军事相应移动部队物流
在救灾情况,如地震或福岛核电站灾害、地形和环境将高度非结构化、不确定性,以及极其危险。这将是部署移动机器人的最佳情况调查情况或开始搜救任务而不是派去人类的第一反应者【防盗标记–盒子君hzj】
.
.
2.足式机器人触地检测是一个难点
动力学尤其难以控制脚接触地面开始或中断,在另一个阶段过度驱动在这些模式之间快速切换
.
.
3.足式机器人(步态调度+支撑相力控)是一个难点
腿的人并不少见机器人在一个阶段欠驱动
.
.
4.模型简化方法
1、用弹簧加载倒立摆(SLIP模型)近似全动态模型
腿式运动的一个常见简化是用弹簧加载倒立摆(滑动)近似全动态模型[3]。倒立摆动力学已经被很好地研究和提供大自由度高自由度系统控制的大简化模型
.
.
5.预测控制
模型预测控制是通过求解一个考虑在后退的预测范围内系统的建模动态,以及返回一组控制输入,这些输入使在预测的时间步长内所需行为的成本函数最小化。变化包括线性、【防盗标记–盒子君hzj】二次或非线性优化问题,每一个都有不同的优点和缺点。
MPC的难点是耗算力,实时性不高导致运动的高动态性能受到限制
运动学和动力学的限制设置复杂,除了处理复杂的动力学,预测优化技术可以自然地处理运动学和动力学方面的考虑,例如关节和扭矩限制、自碰撞和接触摩擦约束与成本函数。
.
.
6.本文贡献
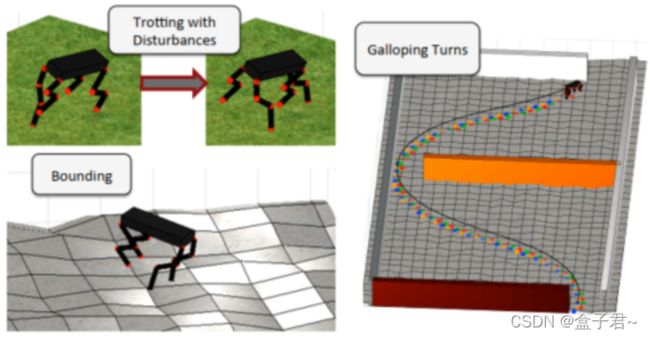
本文的主要贡献在于开发并验证了一种以策略正则化模型预测控制器(PR-MPC)运动控制框架。该方法使用一个简单的模板模型随着输入正则化处理复杂的腿部运动动力学,使得在线非线性优化成为机器人学中的难点。
新的PR-MPC框架允许多个步态和干扰下的各种动态能力不确定的环境【防盗标记–盒子君hzj】
.
.
二、理论与系统建模
作为一个复杂的,高度的对自由系统进行了关键简化,以模拟MIT猎豹机器人同时坚持逼真的近似动力学为系统
运动学和动力学的简化的原则:尽量逼近真是的运动学和动力学模型
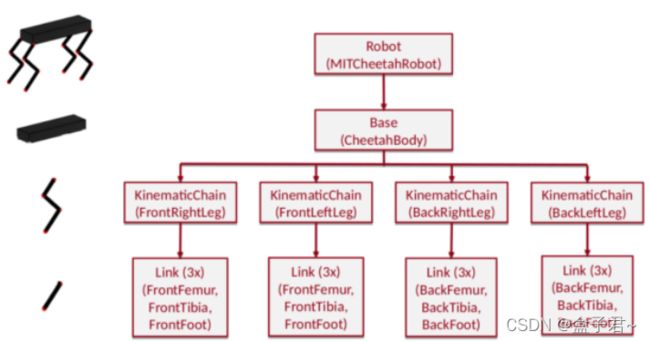
1.运动学模型分析
机器人的运动学可以粗略地建模为一个刚性的箱形浮基座连接到每个髋关节和肩部关节的刚体
(1)运动学解耦结构图:
浮动基座(躯干)+运动链条臂(腿)【防盗标记–盒子君hzj】
.
2.动力学模型分析
(1)动力学简化的方法
只包括躯干单刚体,同时将腿部视为无质量刚体。这种方法在[33]中被证明对这个机器人是有效的,它使用相同的单一刚体基础跳跃和自主跳跃的假设。【防盗标记–盒子君hzj】
(2)动力学解耦图
质量集中模型:一个world坐标系,一个body坐标系,躯干的质心点建立body坐标系,把四条对的作用力等效反映在质心上,用body坐标系描述

.机器人的腿具有较低的质量和惯性,仅占总质量的 10%,将猎豹近似为无质量的腿
向量 rj 指定每只脚相对于身体 CoM 的位置,而力fj 提供每只脚下的力
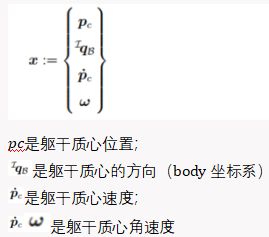
(3)单刚体动力学模型的表达式
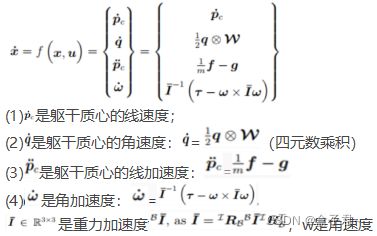
(4)自由浮动基座的状态更新公式(其实就是机器人躯干轨迹信息,这些状态描述机器人CoM的绝对状态)
.
.
.
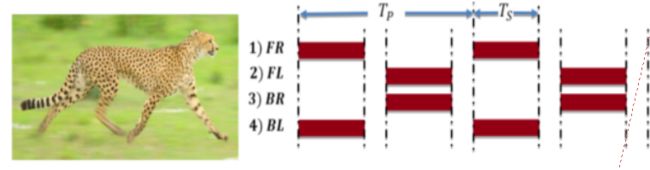
三、步态规划
1.小跑步态相序图:用腾空相和支撑相表达
.
.
2.接触状态转换标志:布尔变量

是基于相位的状态变量,它给出了腿根据给定时间的步态。
.
.
四、预测控制
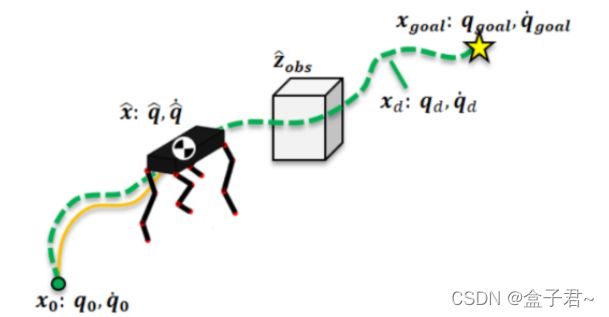
1.CoM轨迹预测图
现阶段目标:预测躯干质心在起始位置到终止位置的轨迹状态:
.
2.总体系统控制框架
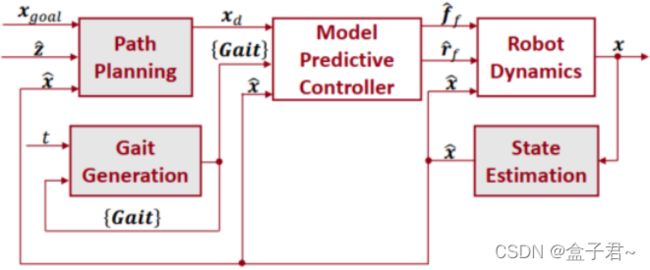
白色显示块在本文详细描述,而灰色块在本工程范围之外不做描述
把数据整好看了再送去MPC控制器。期望的轨迹由更高级别的路径规划算法生成,【防盗标记–盒子君hzj】该径规划算法解决了在具有几何障碍物的环境中安全导航的组合复杂性
(1)运动控制器实现的假设条件
(1)躯干质心CoM路径已经安全可行;
(2)电机的扭矩能保证脚的力量(电机驱动能力达到)
(3)状态估计器是精确的,即高斯噪声是零均值的
(1)COM路径规划path planning
在本工程范围之外不做描述
.
(2)步态生成gait generation
在本工程范围之外不做描述
.
(3)躯干状态估计state estimation
在本工程范围之外不做描述
.
(4)模型预测控制MPC
非线性MPC在线计算要求的算力较多,计算的实时性不高,所以非线性的mpc要进行线性化处理。【防盗标记–盒子君hzj】使用更简单的机器人动力学模型是为了在实际应用程序的优化过程中改进计算时间。
1、简化离散控制模型公式
简化的作用
简化有助于减少针对 MPC 的直接搭配优化问题的求解时间,同时保留了对运动重要的主要动态效果,提供了单个刚体动力学的近似值
简化一
基体的俯仰和横滚被一个较小的值上下限制
![]()
其中 Rz(ψˆ)表示 ψˆ弧度绕 IZ 轴的旋转
.
简化二
速度积项 Bω×B¯IBω 被忽略,因为在实践中它们很小。偏航角用来简化动态欧拉角速率
![]()
.
简化三
侧倾和俯仰较小的状态

其中 Θ˙≈Bω
(这里注意的是简化的过程不在文章中说明,和之前我博客论述的方法一致的)
![]()
其中和都是固定矩阵,而是依赖于离散时间步长∆

离散动力学有一个简单的形式
.
2、PR-MPC公式(MPC优化框架)
这些输入使在预测的时间步长内所需行为的成本函数最小化
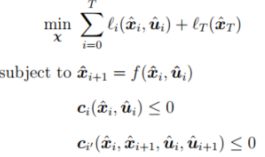
PR-MPC被设计为直接搭配公式。状态和控制是两者都被视为决策变量,其中每个增量成本仅依赖于在当前时间点的相应变量上。待定义的约束只依赖于当前和相邻的时间步长,因此代价约束Jacobians下的突发带状对角稀疏模式可以在解算器中被利用
正则化的相比MPC的优点:
(1)可以加入自己设置的合理策略,比起把MPC运动问题当作黑箱优化来处理,我们可以从简单的物理模型中注入已知的合理策略
(2)正则化可ui降低一定 的复杂度,起到简化模型的目的。
.
3、MPC的约束条件
假设脚不会滑动或引起地面变形。这要求力保持在曲面的摩擦金字塔近似

(1)约束1
在整个站姿中脚必须在地面上,这意味着站立时脚的 坐标必须与该点的地面高度相同,描述如下
![]()
.
(2)约束2
矢量的大小臀部到脚的长度必须小于腿部的最大长度
![]()
ℎ→ 是从臀部到相应脚位置的向量
.
(3)约束3
脚的位置被约束在整个站姿中保持不变
![]()
其中,S∈{0,1}是步态调度布尔变量。
.
(4)约束4
力矩也必须遵守物理限制,力的分量,垂直于地平面必须是正的,因为脚不能在表面上拉动。
![]()
换种方式表达
.
.
(5)动力学控制(机器人动力学解算)robot dynamics
1、反作用力f、脚的位置与关节力矩输出的关系

2、每条腿在驱动质心的坐标系上表示的反作用力和每条腿对应关节的输出力矩的关系
![]()
qj是关节角度:=+
J是雅克比矩阵
fj是反作用力
.
.
(6)足迹轨迹预测公式
足迹位置是使用Raibert启发式向前行走与倒立摆动力学[39]和一个反馈项的组合来设计的从捕获点公式中修正偏离期望轨迹的偏差
![]()
其中 z0 是运动的标称高度,P =(1 0 0 0 1 0)是一个投影矩阵,ph,j 提供髋关节 j 相对于 CoM 的位置,而 pc,0 是 CoM 在以下位置的初始位置步骤的开始
总结
增加基于启发式参考策略来改善非线性优化带来的问题,本质就是把数据整好看了再送去MPC控制器,将策略规则化添加到直接配置优化问题,这些问题可以在线为 MPC 解决【防盗标记–盒子君hzj】