CenterNet网络模型代码_3-pose_dla_dcn.py
这里主要针对在CenterNet中表现还可以的改进过的 dla 网络进行分析,主要还是结合代码进行说明。下面就是代码:
# BN 动量参数
BN_MOMENTUM = 0.1
# 获取打印日志对象
logger = logging.getLogger(__name__)
# 获取预训练网络
def get_model_url(data='imagenet', name='dla34', hash='ba72cf86'):
return join('http://dl.yf.io/dla/models', data, '{}-{}.pth'.format(name, hash))
# 3*3 卷积
def conv3x3(in_planes, out_planes, stride=1):
"3x3 convolution with padding"
return nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride,padding=1, bias=False)
#基础模块(Res18 34中运用)
#3*3 bn relu -> 3*3 bn relu + x(res)
class BasicBlock(nn.Module):
def __init__(self, inplanes, planes, stride=1, dilation=1):
super(BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=3,
stride=stride, padding=dilation,
bias=False, dilation=dilation)
self.bn1 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,
stride=1, padding=dilation,
bias=False, dilation=dilation)
self.bn2 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.stride = stride
def forward(self, x, residual=None):
if residual is None:
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out += residual
out = self.relu(out)
return out
# 残差瓶颈层(50以上的层次用)
#Resnet bottleneck
# 这个瓶颈层其实和 ResNet中的瓶颈层类似,只不过其宽度不同,这里更宽
class Bottleneck(nn.Module):
expansion = 2#这里的膨胀率是2,也就是让网络更宽
# 初始化
def __init__(self, inplanes, planes, stride=1, dilation=1):
super(Bottleneck, self).__init__()
expansion = Bottleneck.expansion
bottle_planes = planes // expansion
self.conv1 = nn.Conv2d(inplanes, bottle_planes,
kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(bottle_planes, momentum=BN_MOMENTUM)
self.conv2 = nn.Conv2d(bottle_planes, bottle_planes, kernel_size=3,
stride=stride, padding=dilation,
bias=False, dilation=dilation)
self.bn2 = nn.BatchNorm2d(bottle_planes, momentum=BN_MOMENTUM)
self.conv3 = nn.Conv2d(bottle_planes, planes,
kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.stride = stride
def forward(self, x, residual=None):
if residual is None:
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
out += residual
out = self.relu(out)
return out
#ResneXt bottleneck
class BottleneckX(nn.Module):
expansion = 2
cardinality = 32
def __init__(self, inplanes, planes, stride=1, dilation=1):
super(BottleneckX, self).__init__()
cardinality = BottleneckX.cardinality
# dim = int(math.floor(planes * (BottleneckV5.expansion / 64.0)))
# bottle_planes = dim * cardinality
bottle_planes = planes * cardinality // 32
self.conv1 = nn.Conv2d(inplanes, bottle_planes,kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(bottle_planes, momentum=BN_MOMENTUM)
# 使用了组卷积,划分方式为 32 组,如果输入的通道是128,输出通道是256 则卷积核会变成 32*8*3*3*4,即每次只考虑在输入4 个通道上 做卷积,输出为8 通道,然后再把 32个输出的 8 通道特征融合(concat)为 256维
self.conv2 = nn.Conv2d(bottle_planes, bottle_planes, kernel_size=3,stride=stride, padding=dilation, bias=False,dilation=dilation, groups=cardinality)
self.bn2 = nn.BatchNorm2d(bottle_planes, momentum=BN_MOMENTUM)
self.conv3 = nn.Conv2d(bottle_planes, planes,
kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.stride = stride
def forward(self, x, residual=None):
if residual is None:
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
out += residual
out = self.relu(out)
return out
# 根 1*1 (in*out) 调整维度的卷积操作,可以使用残差模块
class Root(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, residual):
super(Root, self).__init__()
self.conv = nn.Conv2d(
in_channels, out_channels, 1,
stride=1, bias=False, padding=(kernel_size - 1) // 2)
self.bn = nn.BatchNorm2d(out_channels, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.residual = residual
def forward(self, *x):
children = x
x = self.conv(torch.cat(x, 1))
x = self.bn(x)
if self.residual:
x += children[0]
x = self.relu(x)
return x
# 3*3 conv stack
class Tree(nn.Module):
def __init__(self, levels, block, in_channels, out_channels, stride=1,
level_root=False, root_dim=0, root_kernel_size=1,
dilation=1, root_residual=False):
super(Tree, self).__init__()
if root_dim == 0:
root_dim = 2 * out_channels
if level_root:
root_dim += in_channels
if levels == 1:
self.tree1 = block(in_channels, out_channels, stride,
dilation=dilation)
self.tree2 = block(out_channels, out_channels, 1,
dilation=dilation)
else:
# 堆叠的 BasicBlock 树结构
self.tree1 = Tree(levels - 1, block, in_channels, out_channels,stride, root_dim=0,root_kernel_size=root_kernel_size,
dilation=dilation, root_residual=root_residual)
self.tree2 = Tree(levels - 1, block, out_channels, out_channels,
root_dim=root_dim + out_channels,
root_kernel_size=root_kernel_size,
dilation=dilation, root_residual=root_residual)
if levels == 1:
self.root = Root(root_dim, out_channels, root_kernel_size,
root_residual)
self.level_root = level_root
self.root_dim = root_dim
self.downsample = None
self.project = None
self.levels = levels
if stride > 1:
self.downsample = nn.MaxPool2d(stride, stride=stride)
if in_channels != out_channels:
self.project = nn.Sequential(
nn.Conv2d(in_channels, out_channels,
kernel_size=1, stride=1, bias=False),
nn.BatchNorm2d(out_channels, momentum=BN_MOMENTUM)
)
def forward(self, x, residual=None, children=None):
children = [] if children is None else children
#下采样为True则进行下采样,不然就是 x 本身
bottom = self.downsample(x) if self.downsample else x
# 是否使用1*1卷积进行维度改变(Cin!=Cout)
residual = self.project(bottom) if self.project else bottom
if self.level_root:
children.append(bottom)
x1 = self.tree1(x, residual)# 通过一个残差块
if self.levels == 1:
x2 = self.tree2(x1)#通过第二个残差块
#进行组合x2和x1,进行1*1卷积
x = self.root(x2, x1, *children)
else:
children.append(x1)
x = self.tree2(x1, children=children)
return x
#DLA network backbone
class DLA(nn.Module):
def __init__(self, levels, channels, num_classes=1000,
block=BasicBlock, residual_root=False, linear_root=False):
super(DLA, self).__init__()
self.channels = channels#[16,32,64,128,256,512]
self.num_classes = num_classes#94
# pre-precess 7*7 conv
self.base_layer = nn.Sequential(
nn.Conv2d(3, channels[0], kernel_size=7, stride=1,
padding=3, bias=False),
nn.BatchNorm2d(channels[0], momentum=BN_MOMENTUM),
nn.ReLU(inplace=True))
self.level0 = self._make_conv_level(
channels[0], channels[0], levels[0])
self.level1 = self._make_conv_level(channels[0], channels[1], levels[1], stride=2)
self.level2 = Tree(levels[2], block, channels[1], channels[2], 2,level_root=False,root_residual=residual_root)
self.level3 = Tree(levels[3], block, channels[2], channels[3], 2,level_root=True, root_residual=residual_root)
self.level4 = Tree(levels[4], block, channels[3], channels[4], 2,level_root=True, root_residual=residual_root)
self.level5 = Tree(levels[5], block, channels[4], channels[5], 2,level_root=True, root_residual=residual_root)
# for m in self.modules():
# if isinstance(m, nn.Conv2d):
# n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
# m.weight.data.normal_(0, math.sqrt(2. / n))
# elif isinstance(m, nn.BatchNorm2d):
# m.weight.data.fill_(1)
# m.bias.data.zero_()
# 构建每阶段的卷积
def _make_level(self, block, inplanes, planes, blocks, stride=1):
downsample = None
if stride != 1 or inplanes != planes:
downsample = nn.Sequential(
nn.MaxPool2d(stride, stride=stride),
nn.Conv2d(inplanes, planes,
kernel_size=1, stride=1, bias=False),
nn.BatchNorm2d(planes, momentum=BN_MOMENTUM),
)
layers = []
layers.append(block(inplanes, planes, stride, downsample=downsample))
for i in range(1, blocks):
layers.append(block(inplanes, planes))
return nn.Sequential(*layers)
# 3*3 conv
def _make_conv_level(self, inplanes, planes, convs, stride=1, dilation=1):
modules = []
for i in range(convs):
modules.extend([
nn.Conv2d(inplanes, planes, kernel_size=3,
stride=stride if i == 0 else 1,
padding=dilation, bias=False, dilation=dilation),
nn.BatchNorm2d(planes, momentum=BN_MOMENTUM),
nn.ReLU(inplace=True)])
inplanes = planes
return nn.Sequential(*modules)
def forward(self, x):
y = []
x = self.base_layer(x)
for i in range(6):
x = getattr(self, 'level{}'.format(i))(x)
y.append(x)
return y#levl0-5 out put
# 加载预训练模型
def load_pretrained_model(self, data='imagenet', name='dla34', hash='ba72cf86'):
# fc = self.fc
if name.endswith('.pth'):
model_weights = torch.load(data + name)
else:
model_url = get_model_url(data, name, hash)
model_weights = model_zoo.load_url(model_url)
num_classes = len(model_weights[list(model_weights.keys())[-1]])
self.fc = nn.Conv2d(
self.channels[-1], num_classes,
kernel_size=1, stride=1, padding=0, bias=True)
self.load_state_dict(model_weights)
# self.fc = fc
# 定义dla的一些模块配置
def dla34(pretrained=True, **kwargs): # DLA-34
model = DLA([1, 1, 1, 2, 2, 1],
[16, 32, 64, 128, 256, 512],
block=BasicBlock, **kwargs)
if pretrained:
model.load_pretrained_model(data='imagenet', name='dla34', hash='ba72cf86')
return model
# 返回自身数据
class Identity(nn.Module):
def __init__(self):
super(Identity, self).__init__()
def forward(self, x):
return x
# 初始化权重
def fill_fc_weights(layers):
for m in layers.modules():
if isinstance(m, nn.Conv2d):
if m.bias is not None:
nn.init.constant_(m.bias, 0)
# 初始化权重
def fill_up_weights(up):
w = up.weight.data
f = math.ceil(w.size(2) / 2)
c = (2 * f - 1 - f % 2) / (2. * f)
for i in range(w.size(2)):
for j in range(w.size(3)):
w[0, 0, i, j] = \
(1 - math.fabs(i / f - c)) * (1 - math.fabs(j / f - c))
for c in range(1, w.size(0)):
w[c, 0, :, :] = w[0, 0, :, :]
# 可变形卷积
class DeformConv(nn.Module):
def __init__(self, chi, cho):
super(DeformConv, self).__init__()
self.actf = nn.Sequential(
nn.BatchNorm2d(cho, momentum=BN_MOMENTUM),
nn.ReLU(inplace=True)
)
self.conv = DCN(chi, cho, kernel_size=(3,3), stride=1, padding=1, dilation=1, deformable_groups=1)
def forward(self, x):
x = self.conv(x)
x = self.actf(x)
return x
#上采样
class IDAUp(nn.Module):
def __init__(self, o, channels, up_f):
super(IDAUp, self).__init__()
for i in range(1, len(channels)):
c = channels[i]
f = int(up_f[i])
proj = DeformConv(c, o)#利用可变形卷积进行降维
node = DeformConv(o, o)#利用可变形卷积进行调整特征
#nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride=1, padding=0,
# output_padding=0, groups=1, bias=True, dilation=1)
up = nn.ConvTranspose2d(o, o, f * 2, stride=f,
padding=f // 2, output_padding=0,
groups=o, bias=False)
fill_up_weights(up)
setattr(self, 'proj_' + str(i), proj)
setattr(self, 'up_' + str(i), up)
setattr(self, 'node_' + str(i), node)
def forward(self, layers, startp, endp):
for i in range(startp + 1, endp):
upsample = getattr(self, 'up_' + str(i - startp))
project = getattr(self, 'proj_' + str(i - startp))
layers[i] = upsample(project(layers[i]))
node = getattr(self, 'node_' + str(i - startp))
layers[i] = node(layers[i] + layers[i - 1])
#upsampling
class DLAUp(nn.Module):
def __init__(self, startp, channels, scales, in_channels=None):
super(DLAUp, self).__init__()
self.startp = startp# 2
if in_channels is None:
in_channels = channels
self.channels = channels#[64, 128, 256, 512]
channels = list(channels)#[64, 128, 256, 512]
scales = np.array(scales, dtype=int)#[1,2,4,8]
for i in range(len(channels) - 1):#[0,1,2]
j = -i - 2#[-2,-3,-4] IDAUp:
setattr(self, 'ida_{}'.format(i),
IDAUp(channels[j], in_channels[j:],
scales[j:] // scales[j]))#set the ida_* 为IDAUp(channels[j], in_channels[j:],scales[j:] // scales[j])
scales[j + 1:] = scales[j]
in_channels[j + 1:] = [channels[j] for _ in channels[j + 1:]]
def forward(self, layers):
out = [layers[-1]] # start with 32
for i in range(len(layers) - self.startp - 1):
ida = getattr(self, 'ida_{}'.format(i))
ida(layers, len(layers) -i - 2, len(layers))
out.insert(0, layers[-1])
return out
#线性插值
class Interpolate(nn.Module):
def __init__(self, scale, mode):
super(Interpolate, self).__init__()
self.scale = scale
self.mode = mode
def forward(self, x):
x = F.interpolate(x, scale_factor=self.scale, mode=self.mode, align_corners=False)
return x
# 构架全部的 改进 DLA 结构
class DLASeg(nn.Module):
def __init__(self, base_name, heads, pretrained, down_ratio, final_kernel,
last_level, head_conv, out_channel=0):
super(DLASeg, self).__init__()
assert down_ratio in [2, 4, 8, 16]# down_ratio=4 default
self.first_level = int(np.log2(down_ratio)) # first_level=2
self.last_level = last_level # deafult 5
self.base = globals()[base_name](pretrained=pretrained)#base_name dla34
channels = self.base.channels#[16, 32, 64, 128, 256, 512]
scales = [2 ** i for i in range(len(channels[self.first_level:]))]#[1,2,4,8]
self.dla_up = DLAUp(self.first_level, channels[self.first_level:], scales)
if out_channel == 0:
out_channel = channels[self.first_level]
self.ida_up = IDAUp(out_channel, channels[self.first_level:self.last_level],
[2 ** i for i in range(self.last_level - self.first_level)])
self.heads = heads#{'hm':94,'reg':2,'wh':2}
for head in self.heads:
classes = self.heads[head]
if head_conv > 0:#head_conv 256
#channels[self.first_level]:64
# 3*3-->Relu-->1*1
fc = nn.Sequential(
nn.Conv2d(channels[self.first_level], head_conv,
kernel_size=3, padding=1, bias=True),
nn.ReLU(inplace=True),
nn.Conv2d(head_conv, classes,
kernel_size=final_kernel, stride=1,
padding=final_kernel // 2, bias=True))
if 'hm' in head:
fc[-1].bias.data.fill_(-2.19)
else:
fill_fc_weights(fc)
else:
fc = nn.Conv2d(channels[self.first_level], classes,
kernel_size=final_kernel, stride=1,
padding=final_kernel // 2, bias=True)
if 'hm' in head:
fc.bias.data.fill_(-2.19)
else:
fill_fc_weights(fc)
self.__setattr__(head, fc)
def forward(self, x):
x = self.base(x)#dla34 output
x = self.dla_up(x)# dla upsampling
y = []
for i in range(self.last_level - self.first_level):
y.append(x[i].clone())
self.ida_up(y, 0, len(y))# [64,128,256] stage2_4 upsample directly
z = {}
for head in self.heads:
z[head] = self.__getattr__(head)(y[-1])
return [z]
# 模型主函数
def get_pose_net(num_layers, heads, head_conv=256, down_ratio=4):
model = DLASeg('dla{}'.format(num_layers), heads,
pretrained=True,
down_ratio=down_ratio,
final_kernel=1,
last_level=5,
head_conv=head_conv)
return model
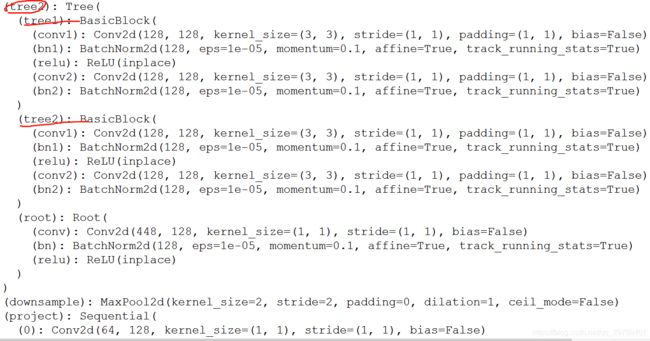
代码可能不容易搞懂,因为里面加了递归,网络结构打印信息为,这个为两个堆叠的块结构: