【R329开发板评测】R329开发板上手体验
首发极术社区
如对Arm相关技术感兴趣,欢迎私信aijishu20加入技术微信群。
R329的板子到手后折腾了几天,将前期学习的步骤简单记录一下。
0.硬件
板子的设计十分精巧,尤其是相机模组的Type-C连接方式,比起以前习惯的相机拽着排线前后翻动好用得多。

翻开显示屏下面是卡槽和两侧Type-C数据接口,左侧连相机,右侧连主机。显示屏是磁吸式的(指两块柔性吸铁石)。卡槽插卡时金手指向下。

最后再来个正面照~

调试板子至少需要:
- 开发板
- USB转Type-C数据线
- 大于512MB的SD卡及读卡器
- 一个Ubuntu主机
- WIFI
1.刷系统制卡
1.1编译系统
参考R329 SDK 上手编译与烧录!以及【R329测评】全志 R329 Tina 系统镜像编译,遗憾的是本地编译u-boot的时候就失败了,遂采用R329开发板系列教程之二|实机运行aipu程序中网盘提供的镜像。
1.2制卡
使用网盘中PhoenixCard工具将img刷入sd卡,因为后面要用到OpenCV,所以先烧写tina_r329-evb5_uart0_0723.img。如下图步骤:
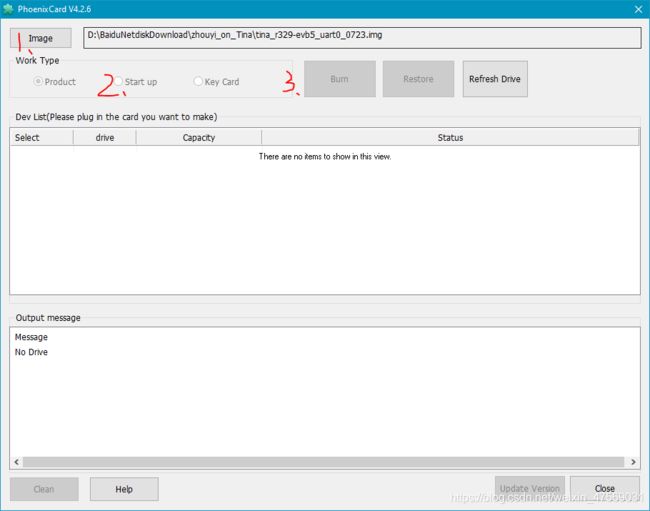
制卡完成显示一个绿色的进度条,如果不行尝试换卡。
注:如果制卡后可以启动,则继续,要是和我一样在启动是找不到根目录,可以在上位机Ubuntu中将根目录删除,并将网盘中rootfs.tar.gz解压拷贝到根目录,拷贝完成后不要急着拔卡,sync一下,要优雅~
1.3扩展分区
系统根目录没有使用所有的存储,可以使用df -h命令查看。在ubuntu运行:
df -h #查看卡挂载的位置,比如/dev/sdb
sudo fdisk /dev/sdb
p #查看分区
d #删除分区8
8
d #删除分区7
7
n #创建分区7
7
xxxx #输入起始位置(原7的起始地址)
w #保存
sudo umount /dev/sdb7
sudo e2fsck -f /dev/sdb7
sudo resize2fs /dev/sdb7
df -h
此时应该将分区扩大了,此处感谢李洋。
1.4开机
数据线连接电脑后,主机打开串口,波特率115200,Ubuntu可以使用
sudo minicom -D /dev/ttyUSB0
开机进入系统:

连接wifi:
wifi_connect_ap_test [wifiname] [wifipasswd]
传递文件用scp,密码是sipeed。
2.验证模型
cd /root/maix_sense
insmod aipu.ko
./run.sh -c mbnetv2
./zhouyi models/mbnetv2/aipu.bin test.bmp 0
将自己模型放到maxi_sense的models下,并且aipu.bin(来自于模型交叉编译),input0.bin(来自量化模型时的输入input.bin)以及output.bin(来自仿真时的输出)文件需要准备好,再回到maix_sense下运行脚本,-c后面跟着的是模型目录名。注意系统给模型预留了约100MB的内存,我的VGG模型过大,所以验证失败。解决办法要么编译系统时扩大预留空间,要么换成更轻量的模型。
可执行文件zhouyi来自于网盘zhouyi_bmp目录,使用交叉编译工具编译,运行时依赖相关的库文件,注意检查系统根目录是否配置。test.bmp的测试图片需要注意输入的尺寸与模型一致,这里是224x224x3。获得一个224x224x3通道的bmp位图可以借助PS软件,打开图片,裁剪为正方形,再点击菜单->图像大小:

然后另存为,选择BMP格式,在弹出的窗口选择高级模式,选择24位R8 G8 B8格式:

保存为test.bmp后发送到板子上运行即可,结果如下,分的类都是猫的类型。

3.跑通OpenCV
3.1编译
参考R329开发板教程之三|视觉模型实时运行。
在上位机准备源码、toolchain和rootfs(内涵opencv的动态库和头文件),目录如下:
.
├── zhouyi_cam
├── rootfs
└── toolchain
在zhouyi_cam路径下CMakLists.txt中需要将编译链和ROOTFS_root配置一下再编译:
mkdir build && cd build
cmake .. && make -j32
下载到板子上,如果目标板系统缺少OpenCV的依赖,参考步骤1.2制卡,将zhouyi_cam拷贝到root下,运行:
cd /root
insmod maix_sense/aipu.ko
./zhouyi_cam maix_sense/models/resnet50/aipu.bin 1
rmmod maix_sense/aipu.ko
运行结果:

测试中发现:
- 帧率和模型有关,resnet50只有78帧,而mbnetv2可以达到2021帧
- 注意参数使用int8还是uint8
- 多跑几次内存不足,所以需要卸载驱动模块。
4.待续
挖坑。
相关阅读:
- 【R329开发板评测】如何优雅地给开发板刷入TinaLinux
- 【R329开发板评测】R329 MaixSense OpenCV图像采集