一个案例展示opencv在医学图像病灶分割任务的常用操作
任务
根据语义分割网络的输出,去求以下任务的结果。(神经网络的后处理操作)
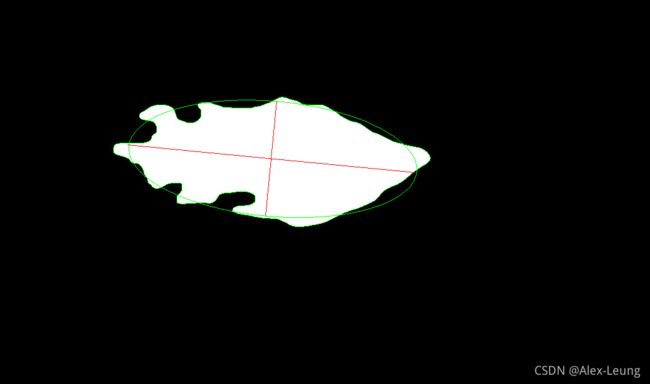
(1)画出病灶边界
(2)画出贴近的椭圆
(3)过滤病灶内的噪声
(4)计算病灶的不规则周长
(5)计算病灶面积
(6)画出径线
原图
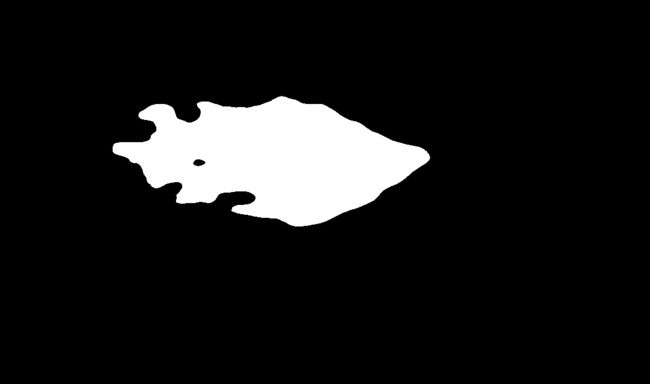
预处理
假设网络为一个二分类语义分割网络,网络的输出是一个二维的tensor,每个像素的值为0~1的置信度。先预处理操作,通过设置阈值把每个像素转换为0或者255,分别代表背景和目标,生成mask图像。储存为cv::Mat 8UC1的模式,图片格式为8位单通道,2^8 = 256, 对应每个像素的取值范围为0 ~ 255。下图已被预处理过,高斯高维滤波后再进行cv::threshold()。
CODE
cv::Mat.rows 是行数 , 即图像的高度(height)
cv::Mat.cols 是列数 , 即图像的宽度(width)
Size(width, height)
cv::Mat.at< type >(height, width)
#include 效果