【Datawhale深入浅出Pytorch】Task01 Pytorch安装和基础
今天正式开始期待已久的组队学习《深入浅出PyTorch》航海之旅咯~
【课程链接】
https://datawhalechina.github.io/thorough-pytorch/index.html
【B站视频】
https://www.bilibili.com/video/BV1L44y1472Z
目录
第一章 PyTorch的简介和安装
Anaconda的安装
Step 1:安装Anaconda/miniconda
Step 2:检验是否安装成功
Step 3:创建虚拟环境
Step 4:换源
安装PyTorch
PyTorch相关资源
第二章:PyTorch基础知识
张量
创建tensor
张量的操作
加法操作:
索引操作:(类似于numpy)
广播机制
自动求导
并行计算简介
为什么要做并行计算
为什么需要CUDA
常见的并行的方法:
网络结构分布到不同的设备中(Network partitioning)
同一层的任务分布到不同数据中(Layer-wise partitioning)
不同的数据分布到不同的设备中,执行相同的任务(Data parallelism)
第一章 PyTorch的简介和安装
之前有自己跟着网上教程手忙脚乱安装过Pytorch,第一章跟着步骤又捋了一遍,图为个人电脑截图。
Anaconda的安装
Step 1:安装Anaconda/miniconda
登陆Anaconda | Individual Edition,选择相应系统DownLoad
Step 2:检验是否安装成功
Step 3:创建虚拟环境
Linux在终端(Ctrl+Alt+T)进行,Windows在Anaconda Prompt进行
查看现存虚拟环境:
conda env list 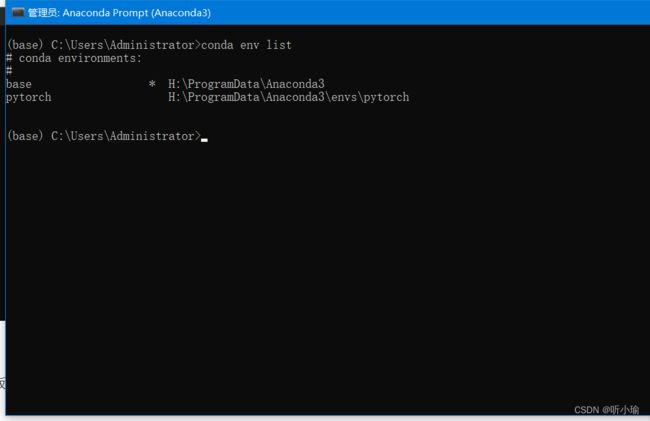 创建虚拟环境:
创建虚拟环境:
conda create -n env_name python==version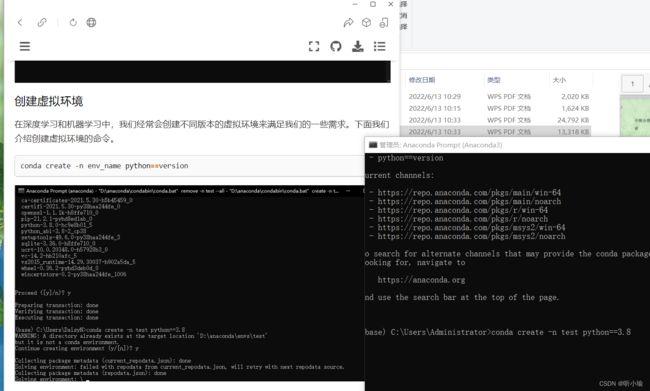
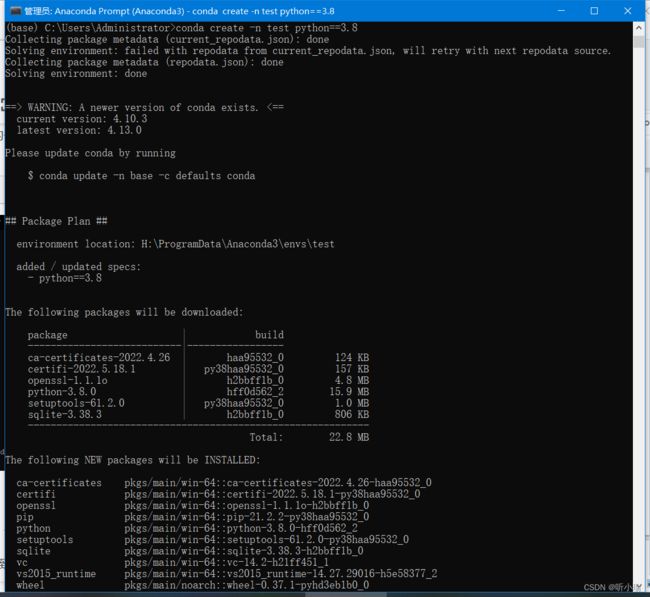
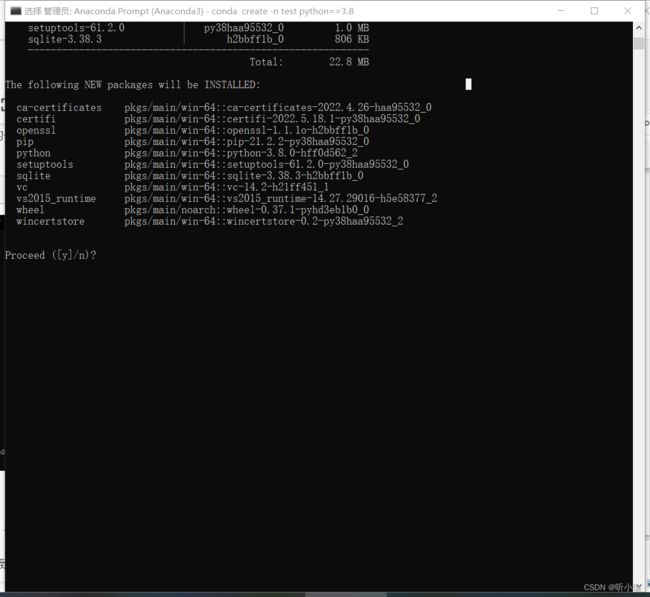

修改虚拟环境名字和版本号即可
注意:warning忽略。Python版本选择3.6-3.8,版本过高会导致相关库不适配。
删除虚拟环境命令
conda remove -n env_name --all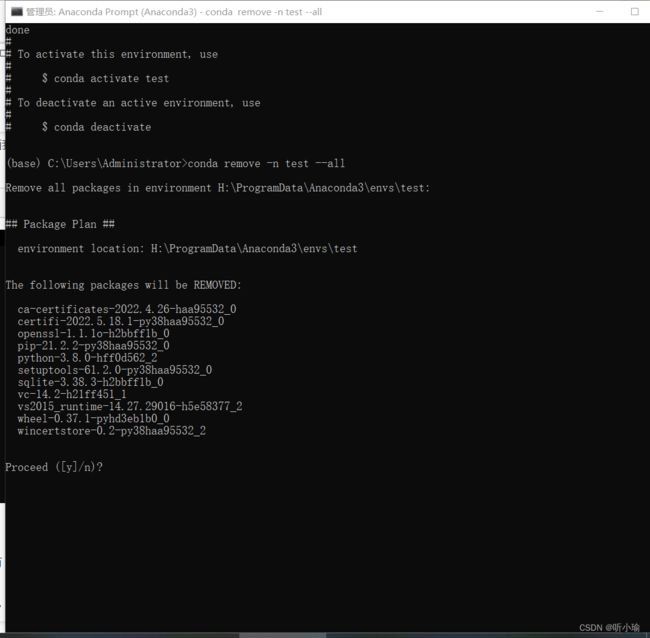
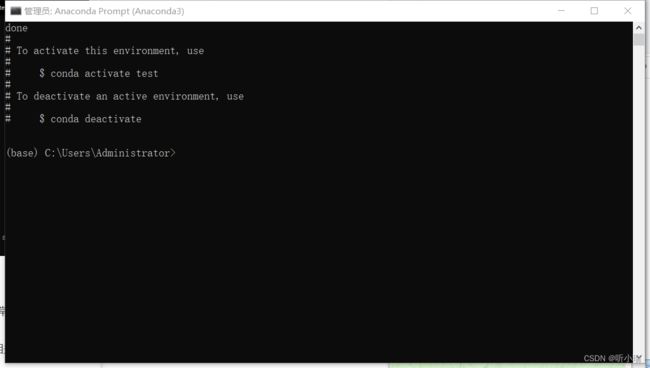
激活环境命令
conda activate env_name退出当前环境
conda deactivateStep 4:换源
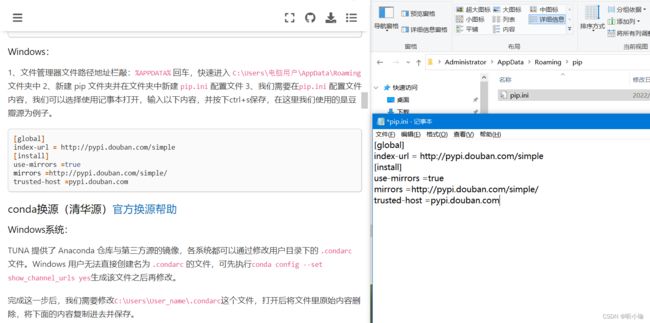
pip换源
查看显卡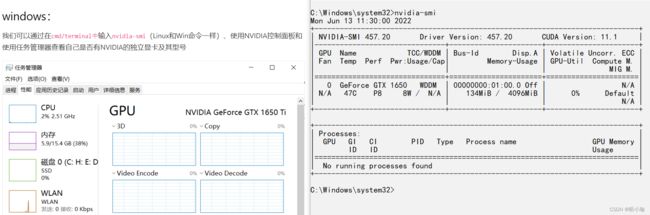
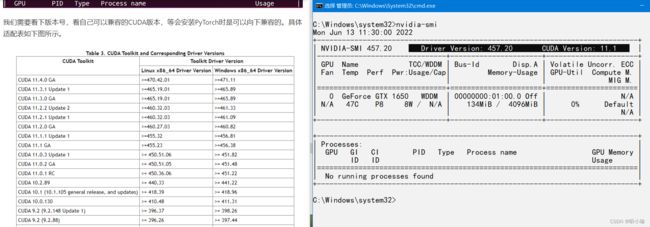
查看对应版本的CUDA
onda换源(清华源)官方换源帮助
Windows系统:
TUNA 提供了 Anaconda 仓库与第三方源的镜像,各系统都可以通过修改用户目录下的 .condarc 文件。Windows 用户无法直接创建名为 .condarc 的文件,可先执行conda config --set show_channel_urls yes生成该文件之后再修改。
完成这一步后,我们需要修改C:\Users\User_name\.condarc这个文件,打开后将文件里原始内容删除,将下面的内容复制进去并保存。
channels: - defaults show_channel_urls: true default_channels: - https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main - https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/r - https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/msys2 custom_channels: conda-forge: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud msys2: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud bioconda: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud menpo: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud pytorch: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud simpleitk: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
这一步完成后,我们需要打开Anaconda Prompt 运行 conda clean -i 清除索引缓存,保证用的是镜像站提供的索引。
安装PyTorch
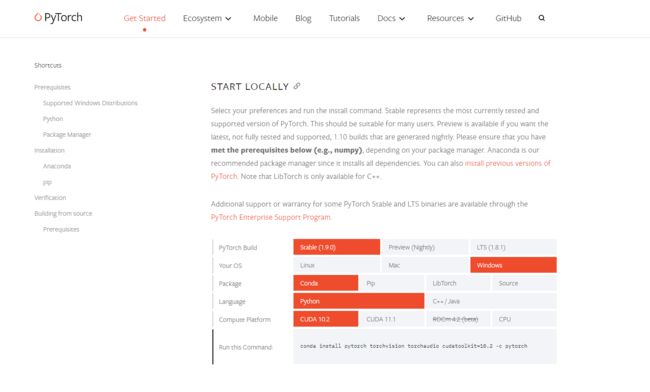
登录PyTorch官网
我们需要结合自己情况选择命令并复制下来,然后使用conda下载或者pip下载(建议conda安装)
打开Terminal,输入conda activate env_name,激活环境并切换到环境下面,我们就可以进行PyTorch的安装了。
如果我们使用的Anaconda Prompt进行下载的话,我们需要先通过conda activate env_name,激活我们的虚拟环境中去,再输入命令。
PyTorch相关资源
PyTorch之所以被越来越多的人使用,不仅在于其完备的教程,还受益于许多相关的资源,在这里,Datawhale列举了相关的优质资源希望能帮助到各位同学。
-
Awesome-pytorch-list:目前已获12K Star,包含了NLP,CV,常见库,论文实现以及Pytorch的其他项目。
-
PyTorch官方文档:官方发布的文档,十分丰富。
-
Pytorch-handbook:GitHub上已经收获14.8K,pytorch手中书。
-
PyTorch官方社区:在这里你可以和开发pytorch的人们进行交流。
第二章:PyTorch基础知识
张量
核心是一个数据容器,用多维数组来理解
在PyTorch中, torch.Tensor 是存储和变换数据的主要工具。 Tensor 和NumPy的多维数组非常类似(补充NumPy知识)。
创建tensor
-
通过
torch.rand()的方法,构造一个随机初始化的矩阵:
import torch
x = torch.rand(4, 3)
print(x)
tensor([[0.7569, 0.4281, 0.4722],
[0.9513, 0.5168, 0.1659],
[0.4493, 0.2846, 0.4363],
[0.5043, 0.9637, 0.1469]])-
通过
torch.zeros()构造一个矩阵全为 0,并且通过dtype设置数据类型为 long。
import torch
x = torch.zeros(4, 3, dtype=torch.long)
print(x)
tensor([[0, 0, 0],
[0, 0, 0],
[0, 0, 0],
[0, 0, 0]])-
我们可以通过
torch.tensor()直接使用数据,构造一个张量:
import torch
x = torch.tensor([5.5, 3])
print(x)
tensor([5.5000, 3.0000])-
基于已经存在的 tensor,创建一个 tensor :
import torch
x = x.new_ones(4, 3, dtype=torch.double) # 创建一个新的tensor,返回的tensor默认具有相同的 torch.dtype和torch.device
# 也可以像之前的写法 x = torch.ones(4, 3, dtype=torch.double)
print(x)
x = torch.randn_like(x, dtype=torch.float)
# 重置数据类型
print(x)
# 结果会有一样的size
# 获取它的维度信息
print(x.size())
print(x.shape)
tensor([[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.]], dtype=torch.float64)
tensor([[ 2.7311, -0.0720, 0.2497],
[-2.3141, 0.0666, -0.5934],
[ 1.5253, 1.0336, 1.3859],
[ 1.3806, -0.6965, -1.2255]])
torch.Size([4, 3])
torch.Size([4, 3])返回的torch.Size其实是一个tuple,⽀持所有tuple的操作。
| 函数 |
功能 |
|---|---|
| Tensor(sizes) |
基础构造函数 |
| tensor(data) |
类似于np.array |
| ones(sizes) |
全1 |
| zeros(sizes) |
全0 |
| eye(sizes) |
对角为1,其余为0 |
| arange(s,e,step) |
从s到e,步长为step |
| linspace(s,e,steps) |
从s到e,均匀分成step份 |
| rand/randn(sizes) |
rand是[0,1)均匀分布;randn是服从N(0,1)的正态分布 |
| normal(mean,std) |
正态分布(均值为mean,标准差是std) |
| randperm(m) |
随机排列 |
张量的操作
-
加法操作:
import torch
# 方式1
y = torch.rand(4, 3)
print(x + y)
# 方式2
print(torch.add(x, y))
# 方式3 提供一个输出 tensor 作为参数
# 这里的 out 不需要和真实的运算结果保持维数一致,但是会有警告提示!
result = torch.empty(5, 3)
torch.add(x, y, out=result)
print(result)
# 方式4 in-place
y.add_(x)
print(y)
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
tensor([[ 2.8977, 0.6581, 0.5856],
[-1.3604, 0.1656, -0.0823],
[ 2.1387, 1.7959, 1.5275],
[ 2.2427, -0.3100, -0.4826]])
-
索引操作:(类似于numpy)
需要注意的是:索引出来的结果与原数据共享内存,修改一个,另一个会跟着修改。如果不想修改,可以考虑使用copy()等方法
# 取第二列
print(x[:, 1])
tensor([-0.0720, 0.0666, 1.0336, -0.6965])
y = x[0,:]
y += 1
print(y)
print(x[0, :]) # 源tensor也被改了了
tensor([3.7311, 0.9280, 1.2497])
tensor([3.7311, 0.9280, 1.2497])改变大小:如果你想改变一个 tensor 的大小或者形状,你可以使用 torch.view:
x = torch.randn(4, 4)
y = x.view(16)
z = x.view(-1, 8) # -1是指这一维的维数由其他维度决定
print(x.size(), y.size(), z.size())
torch.Size([4, 4]) torch.Size([16]) torch.Size([2, 8])注意 view() 返回的新tensor与源tensor共享内存(其实是同一个tensor),也即更改其中的一个,另 外一个也会跟着改变。(顾名思义,view仅仅是改变了对这个张量的观察⻆度)
x += 1
print(x)
print(y) # 也加了了1
tensor([[ 1.3019, 0.3762, 1.2397, 1.3998],
[ 0.6891, 1.3651, 1.1891, -0.6744],
[ 0.3490, 1.8377, 1.6456, 0.8403],
[-0.8259, 2.5454, 1.2474, 0.7884]])
tensor([ 1.3019, 0.3762, 1.2397, 1.3998, 0.6891, 1.3651, 1.1891, -0.6744,
0.3490, 1.8377, 1.6456, 0.8403, -0.8259, 2.5454, 1.2474, 0.7884])所以如果我们想返回一个真正新的副本(即不共享内存)该怎么办呢?Pytorch还提供了一 个 reshape() 可以改变形状,但是此函数并不能保证返回的是其拷贝,所以不推荐使用。推荐先用 clone 创造一个副本然后再使用 view 。
注意:使用 clone 还有一个好处是会被记录在计算图中,即梯度回传到副本时也会传到源 Tensor
如果你有一个元素 tensor ,使用 .item() 来获得这个 value:
import torch
x = torch.randn(1)
print(type(x))
print(type(x.item()))
PyTorch中的 Tensor 支持超过一百种操作,包括转置、索引、切片、数学运算、线性代数、随机数等等,可参考官方文档。
广播机制
当对两个形状不同的 Tensor 按元素运算时,可能会触发广播(broadcasting)机制:先适当复制元素使这两个 Tensor 形状相同后再按元素运算。
x = torch.arange(1, 3).view(1, 2)
print(x)
y = torch.arange(1, 4).view(3, 1)
print(y)
print(x + y)
tensor([[1, 2]])
tensor([[1],
[2],
[3]])
tensor([[2, 3],
[3, 4],
[4, 5]])由于 x 和 y 分别是1行2列和3行1列的矩阵,如果要计算 x + y ,那么 x 中第一行的2个元素被广播 (复制)到了第二行和第三行,⽽ y 中第⼀列的3个元素被广播(复制)到了第二列。如此,就可以对2 个3行2列的矩阵按元素相加。
自动求导
PyTorch 中,所有神经网络的核心是 autograd 包。autograd包为张量上的所有操作提供了自动求导机制。它是一个在运行时定义 ( define-by-run )的框架,这意味着反向传播是根据代码如何运行来决定的,并且每次迭代可以是不同的。
torch.Tensor 是这个包的核心类。如果设置它的属性 .requires_grad 为 True,那么它将会追踪对于该张量的所有操作。当完成计算后可以通过调用 .backward(),来自动计算所有的梯度。这个张量的所有梯度将会自动累加到.grad属性。
注意:在 y.backward() 时,如果 y 是标量,则不需要为 backward() 传入任何参数;否则,需要传入一个与 y 同形的Tensor。
要阻止一个张量被跟踪历史,可以调用.detach()方法将其与计算历史分离,并阻止它未来的计算记录被跟踪。为了防止跟踪历史记录(和使用内存),可以将代码块包装在 with torch.no_grad(): 中。在评估模型时特别有用,因为模型可能具有 requires_grad = True 的可训练的参数,但是我们不需要在此过程中对他们进行梯度计算。
还有一个类对于autograd的实现非常重要:Function。Tensor 和 Function 互相连接生成了一个无环图 (acyclic graph),它编码了完整的计算历史。每个张量都有一个.grad_fn属性,该属性引用了创建 Tensor 自身的Function(除非这个张量是用户手动创建的,即这个张量的grad_fn是 None )。下面给出的例子中,张量由用户手动创建,因此grad_fn返回结果是None。
from __future__ import print_function
import torch
x = torch.randn(3,3,requires_grad=True)
print(x.grad_fn)None
如果需要计算导数,可以在 Tensor 上调用 .backward()。如果 Tensor 是一个标量(即它包含一个元素的数据),则不需要为 backward() 指定任何参数,但是如果它有更多的元素,则需要指定一个gradient参数,该参数是形状匹配的张量。
创建一个张量并设置requires_grad=True用来追踪其计算历史
x = torch.ones(2, 2, requires_grad=True)
print(x)
tensor([[1., 1.],
[1., 1.]], requires_grad=True)对这个张量做一次运算:
y = x**2
print(y)
tensor([[1., 1.],
[1., 1.]], grad_fn=) y是计算的结果,所以它有grad_fn属性。
print(y.grad_fn)对 y 进行更多操作
z = y * y * 3
out = z.mean()
print(z, out)
tensor([[3., 3.],
[3., 3.]], grad_fn=) tensor(3., grad_fn=) .requires_grad_(...) 原地改变了现有张量的requires_grad标志。如果没有指定的话,默认输入的这个标志是 False。
a = torch.randn(2, 2) # 缺失情况下默认 requires_grad = False
a = ((a * 3) / (a - 1))
print(a.requires_grad)
a.requires_grad_(True)
print(a.requires_grad)
b = (a * a).sum()
print(b.grad_fn)False True
梯度
现在开始进行反向传播,因为 out 是一个标量,因此out.backward()和 out.backward(torch.tensor(1.)) 等价。
out.backward()输出导数 d(out)/dx
print(x.grad)
tensor([[3., 3.],
[3., 3.]])
注意:grad在反向传播过程中是累加的(accumulated),这意味着每一次运行反向传播,梯度都会累加之前的梯度,所以一般在反向传播之前需把梯度清零。
# 再来反向传播⼀一次,注意grad是累加的
out2 = x.sum()
out2.backward()
print(x.grad)
out3 = x.sum()
x.grad.data.zero_()
out3.backward()
print(x.grad)
tensor([[4., 4.],
[4., 4.]])
tensor([[1., 1.],
[1., 1.]])现在我们来看一个雅可比向量积的例子:
x = torch.randn(3, requires_grad=True)
print(x)
y = x * 2
i = 0
while y.data.norm() < 1000:
y = y * 2
i = i + 1
print(y)
print(i)
tensor([-0.9332, 1.9616, 0.1739], requires_grad=True)
tensor([-477.7843, 1004.3264, 89.0424], grad_fn=)
8 在这种情况下,y 不再是标量。torch.autograd 不能直接计算完整的雅可比矩阵,但是如果我们只想要雅可比向量积,只需将这个向量作为参数传给 backward:
v = torch.tensor([0.1, 1.0, 0.0001], dtype=torch.float)
y.backward(v)
print(x.grad)
tensor([5.1200e+01, 5.1200e+02, 5.1200e-02])
也可以通过将代码块包装在 with torch.no_grad(): 中,来阻止 autograd 跟踪设置了.requires_grad=True的张量的历史记录。
print(x.requires_grad)
print((x ** 2).requires_grad)
with torch.no_grad():
print((x ** 2).requires_grad)True
True
False如果我们想要修改 tensor 的数值,但是又不希望被 autograd 记录(即不会影响反向传播), 那么我们可以对 tensor.data 进行操作。
x = torch.ones(1,requires_grad=True)
print(x.data) # 还是一个tensor
print(x.data.requires_grad) # 但是已经是独立于计算图之外
y = 2 * x
x.data *= 100 # 只改变了值,不会记录在计算图,所以不会影响梯度传播
y.backward()
print(x) # 更改data的值也会影响tensor的值
print(x.grad)tensor([1.])
False
tensor([100.], requires_grad=True)
tensor([2.])并行计算简介
在利用PyTorch做深度学习的过程中,可能会遇到数据量较大无法在单块GPU上完成,或者需要提升计算速度的场景,这时就需要用到并行计算。本节让我们来简单地了解一下并行计算的基本概念和主要实现方式,具体的内容会在课程的第二部分详细介绍。
为什么要做并行计算
我们学习PyTorch的目的就是可以编写我们自己的框架,来完成特定的任务。可以说,在深度学习时代,GPU的出现让我们可以训练的更快,更好。所以,如何充分利用GPU的性能来提高我们模型学习的效果,这一技能是我们必须要学习的。这一节,我们主要讲的就是PyTorch的并行计算。PyTorch可以在编写完模型之后,让多个GPU来参与训练。
为什么需要CUDA
CUDA是我们使用GPU的提供商——NVIDIA提供的GPU并行计算框架。对于GPU本身的编程,使用的是CUDA语言来实现的。但是,在我们使用PyTorch编写深度学习代码时,使用的CUDA又是另一个意思。在PyTorch使用 CUDA表示要开始要求我们的模型或者数据开始使用GPU了。
在编写程序中,当我们使用了 .cuda 时,其功能是让我们的模型或者数据迁移到GPU当中,通过GPU开始计算。
注:
-
我们使用GPU时使用的是.cuda而不是使用.gpu。这是因为当前GPU的编程接口采用CUDA,但是市面上的GPU并不是都支持CUDA,只有部分NVIDIA的GPU才支持,AMD的GPU编程接口采用的是OpenGL,在现阶段PyTorch并不支持。
-
数据在GPU和CPU之间进行传递时会比较耗时,应当尽量避免。
-
GPU运算很快,但是在使用简单的操作时,我们应该尽量使用CPU去完成。
-
当我们的服务器上有多个GPU,我们应该指明我们使用的GPU是哪一块,如果我们不设置的话,tensor.cuda()方法会默认将tensor保存到第一块GPU上,等价于tensor.cuda(0),这将会导致爆出
out of memory的错误。我们可以通过以下两种方式继续设置:#设置在文件最开始部分 import os os.environ["CUDA_VISIBLE_DEVICE"] = "2" # 设置默认的显卡CUDA_VISBLE_DEVICE=0,1 python train.py # 使用0,1两块GPU
常见的并行的方法:
网络结构分布到不同的设备中(Network partitioning)
在刚开始做模型并行的时候,这个方案使用的比较多。其中主要的思路是,将一个模型的各个部分拆分,然后将不同的部分放入到GPU来做不同任务的计算。其架构如下:

这里遇到的问题就是,不同模型组件在不同的GPU上时,GPU之间的传输就很重要,对于GPU之间的通信是一个考验。但是GPU的通信在这种密集任务中很难办到,所以这个方式慢慢淡出了视野。
同一层的任务分布到不同数据中(Layer-wise partitioning)
第二种方式就是,同一层的模型做一个拆分,让不同的GPU去训练同一层模型的部分任务。其架构如下:
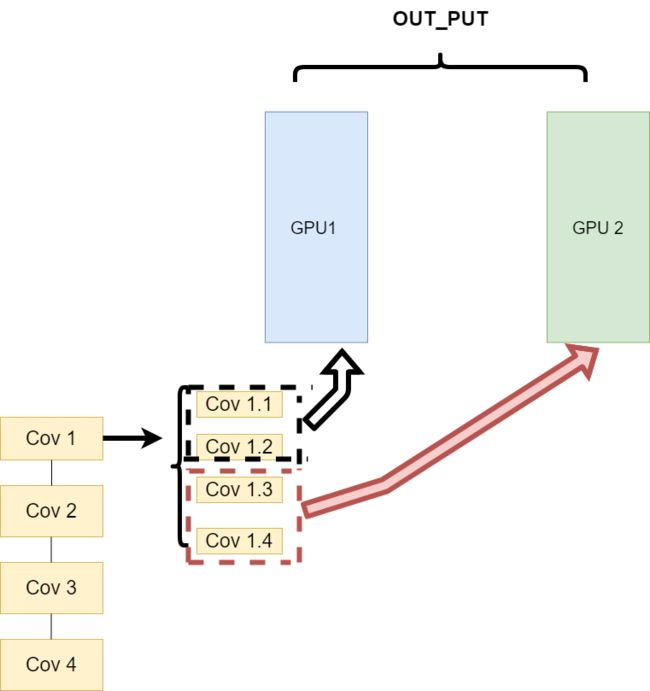
这样可以保证在不同组件之间传输的问题,但是在我们需要大量的训练,同步任务加重的情况下,会出现和第一种方式一样的问题。
不同的数据分布到不同的设备中,执行相同的任务(Data parallelism)
第三种方式有点不一样,它的逻辑是,我不再拆分模型,我训练的时候模型都是一整个模型。但是我将输入的数据拆分。所谓的拆分数据就是,同一个模型在不同GPU中训练一部分数据,然后再分别计算一部分数据之后,只需要将输出的数据做一个汇总,然后再反传。其架构如下:

这种方式可以解决之前模式遇到的通讯问题。
现在的主流方式是数据并行的方式(Data parallelism)
要学习的还有很多,不懂的继续搞懂,争取跟上大部队,加油!