AStar(A*)算法核心思想( for unity)
AStar算法
- 算法思想
- 举例理解
- 核心代码
A* 算法,A* (A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。算法中的距离估算值与实际值越接近,最终搜索速度越快。
注意:AStar的类应该作为一种单例类只提供调用方法,对节点的初始化都应该在节点类中完成
算法思想
1.创建两个列表用于维护节点,openList和closeList
openList用于存储所有已保存但是还未考察的节点
closeList用于存储已经访问的节点
2.只要openList中还存在未考察节点,就从中取出一个代价最低的节点作为当前节点。
3.如果当前节点是目标节点则说明一条合适的路径已经找到。如果不是,则开始为何该节点。
4.对不在closeList列表中的节点重新维护代价,然后放入openList中。
5持续2->4的过程。
举例理解
首先我们需要知道估价函数:F(N)=G(N) + H(N) AStar算法会不断维护节点的代价,以得到代价最小的一段路径
其中:G为是在状态空间中从初始状态到状态n的最小代价
H为 是从状态n到目标状态的最小估计代价
以正方形节点为举例:
对于单位正方形,边长为1,对角线代价为√2 ≈1.1414
但是为了计算将代价都×10,我们规定在水平垂直方向上移动所需的代价为10,对角向方向上移动所需的代价为14.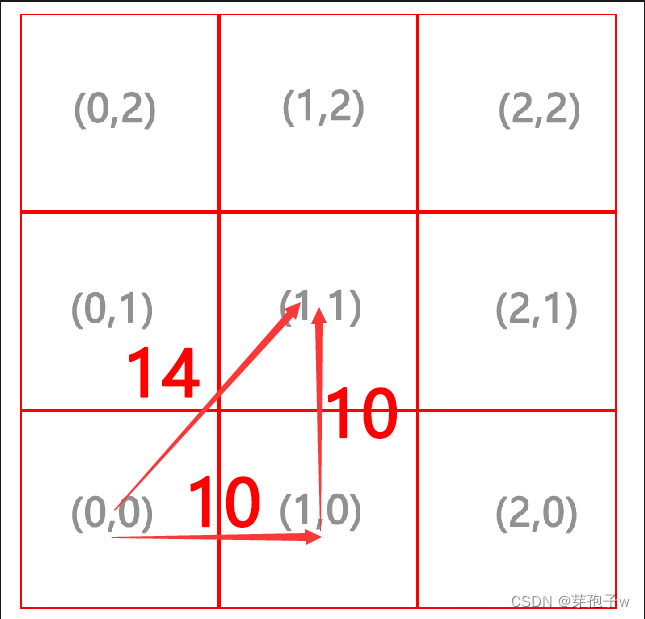
正方形节点的代价开销我会按如下格式标注

那么如果使用A*算法去寻找(0,0,)到(2,2)的路径,会发生什么呢?
第一次寻找:
开始时openList中只有(0,0)一个节点,所以直接找(0,0)的邻居,红色部分为(0,0)的邻居节点(一个正方形应该有8个邻居节点,但是也可以规定对角线方向上的节点不是邻居节点,但一般都不会这样做。)
这三个邻居节点一开始都不存在与closeList中,所以把这三个邻居节点都放入openList中(保存节点时,不会考虑存入的节点代价,任意此刻代价较大的节点都会可能在经历几次查找之后变为openList最小的节点,这样我们的算法就可以“反悔”自己走过的路径)
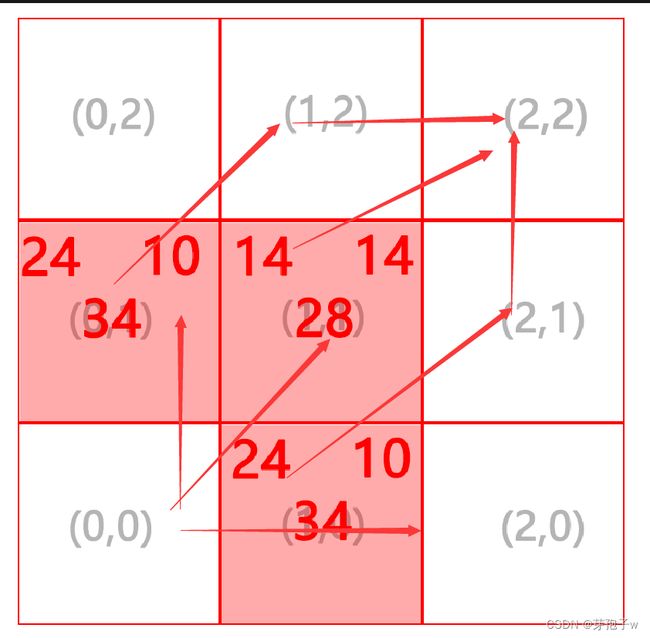
第二次寻找:
此时,openList中有三个节点,也可以看出(1,1)的代价花费最小,所以我们把(1,1)节点拿出来
(1,1)的邻居节点为: (0,0), (1,0), (2,0), (0,1), (2,1),(0,2), (1,2), (2,2)
(0,0)节点已经位于closeList中,(1,0)和(0,1)位于openList中,所以这三个节点都不再重新计算(不退步,也不故意绕路)
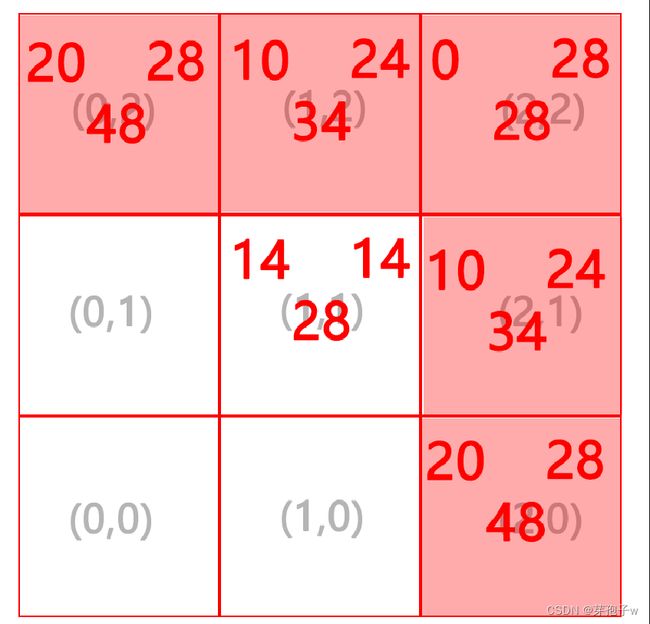
其实在进行这一步寻找时,在找到(2,2)节点时就会直接返回结果,我们也可以看到通过A*算法找到的节点代价是最小的,但是路径却不一定是唯一的(如果在上述正方形节点中,对角线方向上的节点不被视为邻居,那么可以有两条路径从(0,0)通向(2,2))
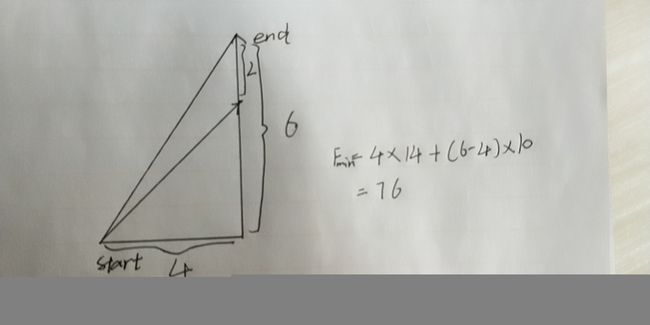
在正方形节点中计算F会用到曼哈顿方法花费花费
Vector2 dist =new Vector2Int(Mathf.Abs((int)pos.x - (int)other.pos.x), Mathf.Abs((int)pos.x- (int) other.pos.y));
int lowest =Mathf.Min(dist.x, dist.y);
int highest =Mathf.Max(dist.x, dist.y);
int horizontalMoveRequired =highest - lowest;
return lowest *14 + horizontalMoveRequired *10;
意思是对于一个直角三角形的路径,我们可以按照先走一个较短直角边的等腰直角三角形的对角线,然后在走一段两直角边之差的距离就可以了。
核心代码
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public static class AStar{
public static List<NodeBase> FindPath(NodeBase startNode,NodeBase endNode){
//打开列表和关闭列表
List<NodeBase> _openList = new List<NodeBase>(){ startNode}; //起始需要在打开列表中填入开始节点
List<NodeBase> _closeList =new List<NodeBase>();
//初始将所有节点的G代价调为最大,否侧起始节点到终点的花费将会因为是0而无法计算。
foreach(var node in GridManger.Instance.Tiles.Values) node.G = int.MaxValue;
startNode.G = 0;
startNode.H = startNode.GetDistance(endNode.coords);
while(_openList.Count > 0){
NodeBase currentNodeBase = GetLowestFCostNode(_openList);
if(currentNodeBase == endNode) return CalculatePath(endNode);
_openList.Remove(currentNodeBase);
_closeList.Add(currentNodeBase);
//遍历邻居
foreach(NodeBase n in currentNodeBase.Neighbours){
//如果这个节点已经存在于关闭列表或者打开列表中就直接跳过
if(_closeList.Contains(n) || _openList.Contains(n)) continue;
//暂时的G代价
var tantativeGCost = currentNodeBase.G + currentNodeBase.GetDistance(n.coords);
if(tantativeGCost < n.G){
n.father =currentNodeBase;
n.G= tantativeGCost;
n.H= n.GetDistance(endNode.coords);
_openList.Add(n);
}
}
}
return null; //没有路径
}
//得到Fcost最低的一个点
private static NodeBase GetLowestFCostNode(List<NodeBase> nodes){
NodeBase lowestFcostNode = nodes[0];
foreach(Node n in nodes){
if(n.F < lowestFcostNode.F) lowestFcostNode = n;
}
return lowestFcostNode;
}
//计算结果路径路径
private static List<NodeBase> CalculatePath(NodeBase node){
List<NodeBase> nodeBases = new List<NodeBase>();
while(node != null){
nodeBases.Add(node);
node=node.father;
}
nodeBases.Reverse();
return nodeBases;
}
}