理解RNN和LSTM
理解RNN和LSTM
-
- 1. RNN
-
- 1.1 RNN结构
- 1.2 模块 A A A 的内部结构
- 1.3 标准RNN的前向传播过程
- 1.4 RNN的训练方法——BPTT
-
- 1.4.1 chain rule 回顾
- 1.4.2 BPTT
- 2. LSTM
-
- 2.1 Why LSTM
- 2.2 LSTM结构
-
- forget gate
- input gate
- output gate
- 3. pytorch中的RNN 和 LSTM module
-
- 3.1 torch.nn.RNN()
- 3.2 torch.nn.LSTM()
- 4. Reference
本文是台大李宏毅教授ML2020课程笔记。同时参考了其他博客。
网上关于RNN和LSTM的blogs太多了,本文只是摘抄+笔记。
1. RNN
RNN(Recurrent Neural Network)是一类用于处理序列数据的神经网络。所谓序列,通常除了数据维度以外,还存在广义的时间维度,即序列是有顺序的,反应了数据随着时间的变化状态,例如,一串语音信号、一段文本或者一段视频都是序列。
1.1 RNN结构
传统的前馈神经网络包含输入层、输出层和隐藏层,通过激活函数控制输出,层与层之间通过权值相连。神经网络训练的过程即是学习这些权重向量。
与基础的NN不同,RNN不仅有多层,且也有激活函数和权值向量,其最大的区别在于,RNN在同一层的神经元之间也存在权值连接,如下图:
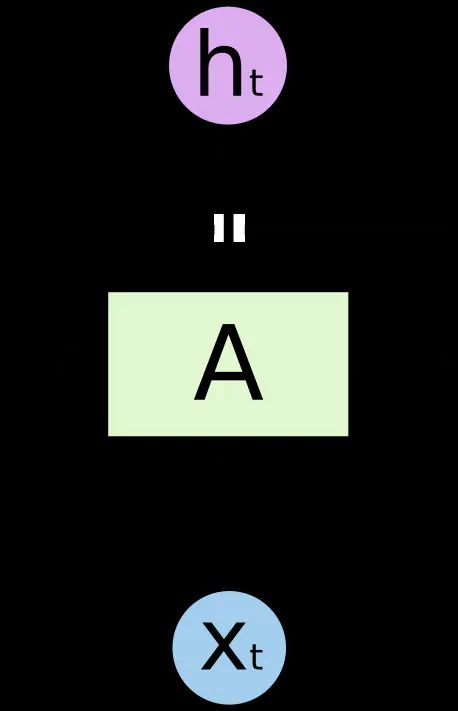
在上面的图中,神经网络的模块, A A A,正在读取某个输入 x i x_i xi,并输出一个值 h i h_i hi 。循环可以使得数据可以从当前步传递到下一步。
在时间维度上将上图展开:
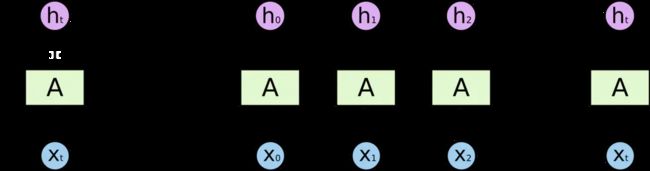
RNN 可以被看做是同一神经网络的多次复制,每个神经网络模块会把消息传递给下一个。特别注意上述并不是传统NN的多个神经元,而是同一个神经元在时间维度上的展开,其本质还是一个神经元。
RNN的基本结构便是这样,我们可以通过堆叠多个模块 A A A (其实就是权值矩阵)来实现多层RNN网络。
为了说明方便,我们设定一个slot filling问题,要求给定一句话,如
I would like to arrive Taipei on November 2nd.
机器能够分别出句子中的信息:
Destination:Taipei
time of arrival:November 2nd
据此构建的RNN网络如下:
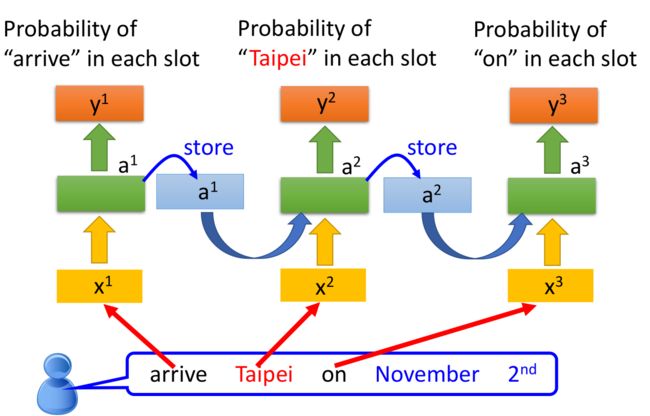
图中,当 x 1 x^1 x1 arrive 输入后,模块 A A A 返回 a 1 a^1 a1 并存储在 A A A 中,当序列的下一个数据 x 2 x^2 x2 Taipei到达时,模块 A A A 根据上一次的结果 a 1 a^1 a1 和当前的输入 x 2 x^2 x2 来决定当前的输出 a 2 a^2 a2 和 y 2 y^2 y2( y 2 y^2 y2 是根据 a 2 a^2 a2 得到的)。
1.2 模块 A A A 的内部结构
为了更深入理解RNN的具体工作原理以及后面back-propagation 的推导,有必要从数学上知道整个RNN的工作过程。我们将上图RNN的结构更详细的表示成:
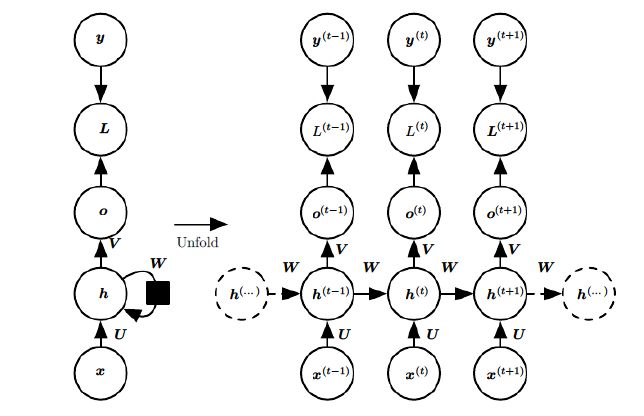
这是一个标准的RNN结构图,图中每个箭头代表做一次变换,和之前一样,左侧是折叠起来的样子,右侧是展开的样子。我们可以很清楚的知道模块 A A A 包含了哪些结构。图中, x x x 代表输入向量, U 、 V 、 W U、V、W U、V、W代表将要学习的权值矩阵, o o o 代表输出, y y y 代表样本给出的确定值(即标签),元素右上角带的 t t t 代表 t t t 时刻的状态(或者说,序列中的第 t t t 个元素), L L L 代表损失函数,我们可以看到,损失也是随着序列的推进而不断积累的。
1.3 标准RNN的前向传播过程
有了以上结构,RNN的 feed-forward过程如下。对于 t t t 时刻,有:
h ( t ) = ϕ ( U x ( t ) + W h ( t − 1 ) + b ) h^{(t)}=\phi\left(U x^{(t)}+W h^{(t-1)}+b\right) h(t)=ϕ(Ux(t)+Wh(t−1)+b)
这里的 h ( t ) h^{(t)} h(t) 和前文例子中的 a t a^t at 一样,只不过来自于不同的资料,数学符号表示不同。
其中 ϕ ( ) \phi() ϕ() 为激活函数,一般来说会选择 tanh 函数, b b b 为偏置。
显然, t t t 时刻的输出如下:
o ( t ) = V h ( t ) + c o^{(t)}=V h^{(t)}+c o(t)=Vh(t)+c
最终模型的预测输出为:
y ^ ( t ) = σ ( o ( t ) ) \widehat{y}^{(t)}=\sigma\left(o^{(t)}\right) y (t)=σ(o(t))
其中 σ ( ) \sigma() σ() 为激活函数,通常RNN用于分类,故这里一般用 softmax 函数。
1.4 RNN的训练方法——BPTT
BPTT(back-propagation through time)算法是常用的训练RNN的方法,其实本质还是BP算法,只不过RNN处理时间序列数据,所以要基于时间反向传播,故叫随时间反向传播。BPTT的中心思想和BP算法相同,沿着需要优化的参数的负梯度方向不断寻找更优的点直至收敛,因此仍需要求各个参数的梯度。
1.4.1 chain rule 回顾
考虑函数 z = f ( x , y ) z=f(x, y) z=f(x,y), 其中 x = g ( t ) , y = h ( t ) , g ( t ) x=g(t), y=h(t), g(t) x=g(t),y=h(t),g(t) 和 h ( t ) h(t) h(t) 是可微函数, 那么:
d z d t = ∂ z ∂ x d x d t + ∂ z ∂ y d y d t \frac{d z}{d t}=\frac{\partial z}{\partial x} \frac{d x}{d t}+\frac{\partial z}{\partial y} \frac{d y}{d t} dtdz=∂x∂zdtdx+∂y∂zdtdy
假设 z = f ( u , ν ) z=f(u, \nu) z=f(u,ν) 的每一个自变量都是二元函数, 也就是说, u = h ( x , y ) , V = g ( x , y ) u=h(x, y), \quad V=g(x, y) u=h(x,y),V=g(x,y), 且这些函数都是可微的。那么, z z z 的偏导数为:
∂ z ∂ x = ∂ z ∂ u ∂ u ∂ x + ∂ z ∂ v ∂ v ∂ x ∂ z ∂ y = ∂ z ∂ u ∂ u ∂ y + ∂ z ∂ v ∂ v ∂ y \begin{aligned} &\frac{\partial z}{\partial x}=\frac{\partial z}{\partial u} \frac{\partial u}{\partial x}+\frac{\partial z}{\partial v} \frac{\partial v}{\partial x} \\ &\frac{\partial z}{\partial y}=\frac{\partial z}{\partial u} \frac{\partial u}{\partial y}+\frac{\partial z}{\partial v} \frac{\partial v}{\partial y} \end{aligned} ∂x∂z=∂u∂z∂x∂u+∂v∂z∂x∂v∂y∂z=∂u∂z∂y∂u+∂v∂z∂y∂v
1.4.2 BPTT
观察 1.2 中的结构,需要寻优的参数有三个,分别是 U 、 V 、 W U、V、W U、V、W 。与BP算法不同的是,其中 W W W 和 U U U 两个参数的寻优过程需要追溯之前的历史数据,参数 V V V 相对简单只需关注目前,那么我们就来先求解参数 V V V 的偏导数:
∂ L ( t ) ∂ V = ∂ L ( t ) ∂ o ( t ) ⋅ ∂ o ( t ) ∂ V \frac{\partial L^{(t)}}{\partial V}=\frac{\partial L^{(t)}}{\partial o^{(t)}} \cdot \frac{\partial o^{(t)}}{\partial V} ∂V∂L(t)=∂o(t)∂L(t)⋅∂V∂o(t)
因为 V V V 是与时间无关的参数,所有没有角标 t t t。
其中, L t L^{t} Lt 代表了时刻 t t t 的损失函数,而总的损失函数是所有时刻的损失函数求和:
L = ∑ t = 1 n L ( t ) L=\sum_{t=1}^{n} L^{(t)} L=t=1∑nL(t)
因此,最终损失函数 L L L 对 V V V 的梯度如下:
∂ L ∂ V = ∑ t = 1 n ∂ L ( t ) ∂ o ( t ) ⋅ ∂ o ( t ) ∂ V \frac{\partial L}{\partial V}=\sum_{t=1}^{n} \frac{\partial L^{(t)}}{\partial o^{(t)}} \cdot \frac{\partial o^{(t)}}{\partial V} ∂V∂L=t=1∑n∂o(t)∂L(t)⋅∂V∂o(t)
其中, ∂ L ( t ) ∂ o ( t ) \frac{\partial L^{(t)}}{\partial o^{(t)}} ∂o(t)∂L(t) 取决于损失函数的定义, ∂ o ( t ) ∂ V = h ( t ) \frac{\partial o^{(t)}}{\partial V}=h^{(t)} ∂V∂o(t)=h(t)。 W W W 和 U U U 的偏导的求解由于需要涉及到历史数据,其偏导求起来相对复杂,我们先假设只有三个时刻,那么在第二个时刻 L L L 对 W W W 的偏导数为:
∂ L ( 2 ) ∂ W = ∂ L ( 2 ) ∂ o ( 2 ) ∂ o ( 2 ) ∂ h ( 2 ) ∂ h ( 2 ) ∂ W + ∂ L ( 2 ) ∂ o ( 2 ) ∂ o ( 2 ) ∂ h ( 2 ) ∂ h ( 2 ) ∂ h ( 1 ) ∂ h ( 1 ) ∂ W \frac{\partial L^{(2)}}{\partial W}=\frac{\partial L^{(2)}}{\partial o^{(2)}} \frac{\partial o^{(2)}}{\partial h^{(2)}} \frac{\partial h^{(2)}}{\partial W}+\frac{\partial L^{(2)}}{\partial o^{(2)}} \frac{\partial o^{(2)}}{\partial h^{(2)}} \frac{\partial h^{(2)}}{\partial h^{(1)}} \frac{\partial h^{(1)}}{\partial W} ∂W∂L(2)=∂o(2)∂L(2)∂h(2)∂o(2)∂W∂h(2)+∂o(2)∂L(2)∂h(2)∂o(2)∂h(1)∂h(2)∂W∂h(1)
同理,该时刻 L L L 对 U U U 的偏导数为:
∂ L ( 2 ) ∂ U = ∂ L ( 2 ) ∂ o ( 2 ) ∂ o ( 2 ) ∂ h ( 2 ) ∂ h ( 2 ) ∂ U + ∂ L ( 2 ) ∂ o ( 2 ) ∂ o ( 2 ) ∂ h ( 2 ) ∂ h ( 2 ) ∂ h ( 1 ) ∂ h ( 1 ) ∂ U \frac{\partial L^{(2)}}{\partial U}=\frac{\partial L^{(2)}}{\partial o^{(2)}} \frac{\partial o^{(2)}}{\partial h^{(2)}} \frac{\partial h^{(2)}}{\partial U}+\frac{\partial L^{(2)}}{\partial o^{(2)}} \frac{\partial o^{(2)}}{\partial h^{(2)}} \frac{\partial h^{(2)}}{\partial h^{(1)}} \frac{\partial h^{(1)}}{\partial U} ∂U∂L(2)=∂o(2)∂L(2)∂h(2)∂o(2)∂U∂h(2)+∂o(2)∂L(2)∂h(2)∂o(2)∂h(1)∂h(2)∂U∂h(1)
在第三个时刻,有:
∂ L ( 3 ) ∂ W = ∂ L ( 3 ) ∂ o ( 3 ) ∂ o ( 3 ) ∂ h ( 3 ) ∂ h ( 3 ) ∂ W + ∂ L ( 3 ) ∂ o ( 3 ) ∂ o ( 3 ) ∂ h ( 3 ) ∂ h ( 3 ) ∂ h ( 2 ) ∂ h ( 2 ) ∂ W + ∂ L ( 3 ) ∂ o ( 3 ) ∂ o ( 3 ) ∂ h ( 3 ) ∂ h ( 3 ) ∂ h ( 2 ) ∂ h ( 2 ) ∂ h ( 1 ) ∂ h ( 1 ) ∂ W \frac{\partial L^{(3)}}{\partial W}=\frac{\partial L^{(3)}}{\partial o^{(3)}} \frac{\partial o^{(3)}}{\partial h^{(3)}} \frac{\partial h^{(3)}}{\partial W}+\frac{\partial L^{(3)}}{\partial o^{(3)}} \frac{\partial o^{(3)}}{\partial h^{(3)}} \frac{\partial h^{(3)}}{\partial h^{(2)}} \frac{\partial h^{(2)}}{\partial W}+\frac{\partial L^{(3)}}{\partial o^{(3)}} \frac{\partial o^{(3)}}{\partial h^{(3)}} \frac{\partial h^{(3)}}{\partial h^{(2)}} \frac{\partial h^{(2)}}{\partial h^{(1)}} \frac{\partial h^{(1)}}{\partial W} ∂W∂L(3)=∂o(3)∂L(3)∂h(3)∂o(3)∂W∂h(3)+∂o(3)∂L(3)∂h(3)∂o(3)∂h(2)∂h(3)∂W∂h(2)+∂o(3)∂L(3)∂h(3)∂o(3)∂h(2)∂h(3)∂h(1)∂h(2)∂W∂h(1)
∂ L ( 3 ) ∂ W = ∂ L ( 3 ) ∂ o ( 3 ) ∂ o ( 3 ) ∂ h ( 3 ) ∂ h ( 3 ) ∂ W + ∂ L ( 3 ) ∂ o ( 3 ) ∂ o ( 3 ) ∂ h ( 3 ) ∂ h ( 3 ) ∂ h ( 2 ) ∂ h ( 2 ) ∂ W + ∂ L ( 3 ) ∂ o ( 3 ) ∂ o ( 3 ) ∂ h ( 3 ) ∂ h ( 3 ) ∂ h ( 2 ) ∂ h ( 2 ) ∂ h ( 1 ) ∂ h ( 1 ) ∂ W \frac{\partial L^{(3)}}{\partial W}=\frac{\partial L^{(3)}}{\partial o^{(3)}} \frac{\partial o^{(3)}}{\partial h^{(3)}} \frac{\partial h^{(3)}}{\partial W}+\frac{\partial L^{(3)}}{\partial o^{(3)}} \frac{\partial o^{(3)}}{\partial h^{(3)}} \frac{\partial h^{(3)}}{\partial h^{(2)}} \frac{\partial h^{(2)}}{\partial W}+\frac{\partial L^{(3)}}{\partial o^{(3)}} \frac{\partial o^{(3)}}{\partial h^{(3)}} \frac{\partial h^{(3)}}{\partial h^{(2)}} \frac{\partial h^{(2)}}{\partial h^{(1)}} \frac{\partial h^{(1)}}{\partial W} ∂W∂L(3)=∂o(3)∂L(3)∂h(3)∂o(3)∂W∂h(3)+∂o(3)∂L(3)∂h(3)∂o(3)∂h(2)∂h(3)∂W∂h(2)+∂o(3)∂L(3)∂h(3)∂o(3)∂h(2)∂h(3)∂h(1)∂h(2)∂W∂h(1)
而为了求出整个损失函数 L L L 对 W 、 U W、U W、U 的偏导数,我们需要对损失函数求和。观察上式,我们可以发现规律如下:
∂ L ( t ) ∂ W = ∑ k = 1 t ∂ L ( t ) ∂ o ( t ) ∂ o ( t ) ∂ h ( t ) ( ∏ j = k + 1 t ∂ h ( j ) ∂ h ( j − 1 ) ) ∂ h ( k ) ∂ W ∂ L ( t ) ∂ U = ∑ k = 1 t ∂ L ( t ) ∂ o ( t ) ∂ o ( t ) ∂ h ( t ) ( ∏ j = k + 1 t ∂ h ( j ) ∂ h ( j − 1 ) ) ∂ h ( k ) ∂ U \begin{aligned} &\frac{\partial L^{(t)}}{\partial W}=\sum_{k=1}^{t} \frac{\partial L^{(t)}}{\partial o^{(t)}} \frac{\partial o^{(t)}}{\partial h^{(t)}}\left(\prod_{j=k+1}^{t} \frac{\partial h^{(j)}}{\partial h^{(j-1)}}\right) \frac{\partial h^{(k)}}{\partial W} \\ &\frac{\partial L^{(t)}}{\partial U}=\sum_{k=1}^{t} \frac{\partial L^{(t)}}{\partial o^{(t)}} \frac{\partial o^{(t)}}{\partial h^{(t)}}\left(\prod_{j=k+1}^{t} \frac{\partial h^{(j)}}{\partial h^{(j-1)}}\right) \frac{\partial h^{(k)}}{\partial U} \end{aligned} ∂W∂L(t)=k=1∑t∂o(t)∂L(t)∂h(t)∂o(t)⎝⎛j=k+1∏t∂h(j−1)∂h(j)⎠⎞∂W∂h(k)∂U∂L(t)=k=1∑t∂o(t)∂L(t)∂h(t)∂o(t)⎝⎛j=k+1∏t∂h(j−1)∂h(j)⎠⎞∂U∂h(k)
其中, ∏ j = k + 1 t \prod_{j=k+1}^{t} ∏j=k+1t 当 j = k + 1 > t j=k+1>t j=k+1>t 时值为1。
整体的偏导公式就是将其按时刻再一一加起来。可以看出,中间的累乘部分:
∏ j = k + 1 t ∂ h ( j ) ∂ h ( j − 1 ) = ∏ j = k + 1 t f ′ ⋅ W s \prod_{j=k+1}^{t} \frac{\partial h^{(j)}}{\partial h^{(j-1)}} = \prod_{j=k+1}^{t} f ^{\prime} \cdot W_{s} j=k+1∏t∂h(j−1)∂h(j)=j=k+1∏tf′⋅Ws
f ( ) f() f() 代表激活函数,可选 tanh \tanh tanh 或者 s i g m o i d sigmoid sigmoid ,而由于这两个函数的导数都非常小(且小于 1 1 1),累乘之后将接近于 0 0 0,从而导致整个梯度接近于零,这种现象被称为梯度消失。
解决梯度消失是非常重要的,否则网络将收敛地很慢,常用的改善方法为:
- 选取更好的激活函数,例如 ReLU,该函数在大于零时的导数为 1 1 1,这就避免了小数的连乘,一定程度上改善了梯度消失。
- 改变传播结构。
2. LSTM
2.1 Why LSTM
RNN 的关键之一就是他们可以用来连接先前的信息到当前的任务上。例如,我们有一个语言模型用来基于先前的词来预测下一个词。如果我们试着预测 “the clouds are in the ____” 最后的词,我们并不需要任何其他的上下文 —— 因为下一个词很显然就应该是 sky。在这样的场景中,相关的信息和预测的词位置之间的间隔是非常小的,RNN 可以学会使用先前的信息。但是同样会有一些更加复杂的场景。假设我们试着去预测“I grew up in France… I speak fluent ____”最后的词(…表示中间还有一些其他的句子)。当前的信息建议下一个词可能是一种语言的名字,但是如果我们需要弄清楚是什么语言,我们是需要先前提到的离当前位置很远的 France 的上下文的。不幸的是,正如前文所言,在这个间隔不断增大时,RNN对远处信息的学习能力大幅下降。
因此,Hochreiter & Schmidhuber (1997) 等人于1997年就提出了LSTM 网络,并且在接下来的工作中被许多人改进和推广。LSTM 在各种各样的问题上表现非常出色,现在被广泛使用。它被明确设计用来避免长期依赖性问题。长时间记住信息实际上是 LSTM 的默认行为,而不是需要努力学习的东西。
2.2 LSTM结构
首先回顾一下在RNN的前向传播结构中,模块 A A A 中的内容可以用数学公式表示为:
h ( t ) = ϕ ( U x ( t ) + W h ( t − 1 ) + b ) h^{(t)}=\phi\left(U x^{(t)}+W h^{(t-1)}+b\right) h(t)=ϕ(Ux(t)+Wh(t−1)+b)
即通过一个 tanh 层实现重复的模块:

LSTM 同样是这样的结构,但是重复的模块拥有一个不同的结构。不同于 单一神经网络层,这里是有四个,以一种非常特殊的方式进行交互:
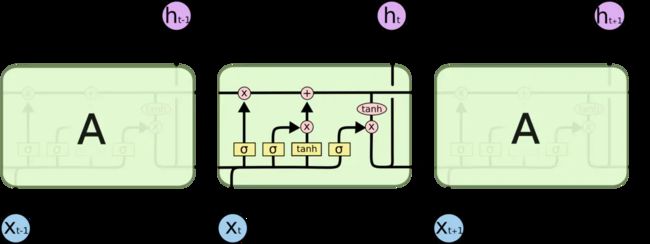
先来熟悉一下图中使用的各种元素的图标:

在上面的图例中,每一条黑线传输着一整个向量,从一个节点的输出到其他节点的输入。粉色的圈代表 pointwise (对应元素)的操作,而黄色的矩阵就是学习到的神经网络层。合在一起的线表示向量的连接,分开的线表示内容被复制,然后分发到不同的位置。
LSTM 内部的本质还是矩阵向量乘法和激活函数计算,为了方便理解,将 LSTM 的内部结构分成三个门(gate),分别是 input gate、forget gate 和 output gate。图中的 σ ( ) \sigma() σ() 都是指 sigmoid 函数,取值显然是 0 0 0 到 1 1 1,用来表示该gate对数据的控制作用,0 代表“不许任何量通过”,1 就指“允许任意量通过”。
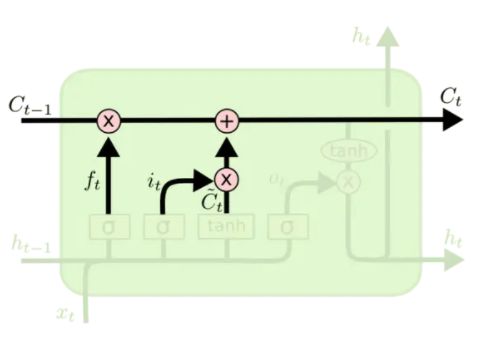
forget gate
LSTM 中,模块上方的水平线就代表了这个模块的 memory,即下图的 C t − 1 、 C t C_{t-1}、C_t Ct−1、Ct :
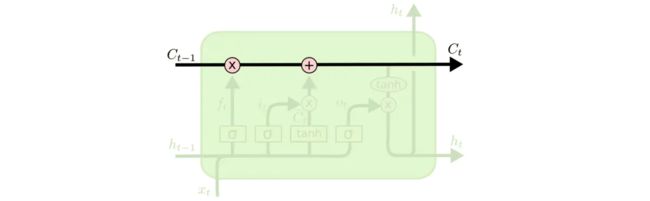
forget gate用来决定上一时刻模块中的 memory 的保留程度
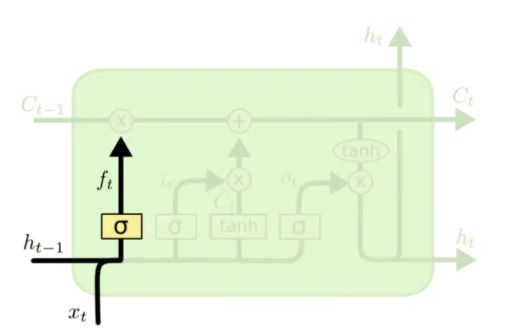
首先 sigmoid 函数的输出为:
f t = σ ( W f ⋅ [ h t − 1 , x t ] + b f ) f_{t}=\sigma\left(W_{f} \cdot\left[h_{t-1}, x_{t}\right]+b_{f}\right) ft=σ(Wf⋅[ht−1,xt]+bf)
其中, W f 、 b f W_f、b_f Wf、bf 为forget gate 的权值矩阵和向量, h t − 1 h_{t-1} ht−1 为上一时刻该模块(神经元)的输出, x t x_t xt 为 t t t 时刻输入。通过 sigmoid 函数的结果 f t f_t ft 和 上一时刻模块的 memory C t − 1 C_{t-1} Ct−1 相乘,决定我们会从模块中丢弃什么信息。例如,当我们看到一个长句子新的主语,我们希望忘记旧的主语。
input gate
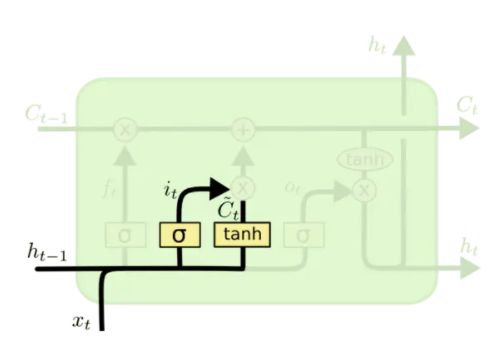
下一步是确定什么样的新信息被存放在模块中。这里包含两个部分。第一,sigmoid 层决定什么值将要更新。然后,一个 tanh 层创建一个新的向量(memory), C ~ t \tilde{C}_t C~t,会被加入到该模块中。下一步,将这两个信息来产生对状态的更新:
i t = σ ( W i ⋅ [ h t − 1 , x t ] + b i ) C ~ t = tanh ( W C ⋅ [ h t − 1 , x t ] + b C ) \begin{aligned} i_{t} &=\sigma\left(W_{i} \cdot\left[h_{t-1}, x_{t}\right]+b_{i}\right) \\ \tilde{C}_{t} &=\tanh \left(W_{C} \cdot\left[h_{t-1}, x_{t}\right]+b_{C}\right) \end{aligned} itC~t=σ(Wi⋅[ht−1,xt]+bi)=tanh(WC⋅[ht−1,xt]+bC)
此时输入数据以及处理完毕。这里的 W 、 b W、b W、b 同样代表要被学习的权值矩阵和向量。
output gate
最后在 output gate 中,首先更新模块的 memory,并输出该模块该时刻最终的处理结果 h t h_t ht,:
C t ′ = i t ⋅ C ~ t C t = C t ′ + f t ⋅ C t − 1 = i t ⋅ C ~ t + f t ⋅ C t − 1 o t = σ ( W o [ h t − 1 , x t ] + b o ) h t = o t ∗ tanh ( C t ) \begin{aligned} C_{t}^{\prime} &= i_{t} \cdot \tilde{C}_{t} \\ C_{t} &= C_{t}^{\prime} + f_t \cdot C_{t-1} = i_{t} \cdot \tilde{C}_{t} + f_t \cdot C_{t-1}\\ o_{t} &=\sigma\left(W_{o}\left[h_{t-1}, x_{t}\right]+b_{o}\right) \\ h_{t} &=o_{t} * \tanh \left(C_{t}\right) \end{aligned} Ct′Ctotht=it⋅C~t=Ct′+ft⋅Ct−1=it⋅C~t+ft⋅Ct−1=σ(Wo[ht−1,xt]+bo)=ot∗tanh(Ct)
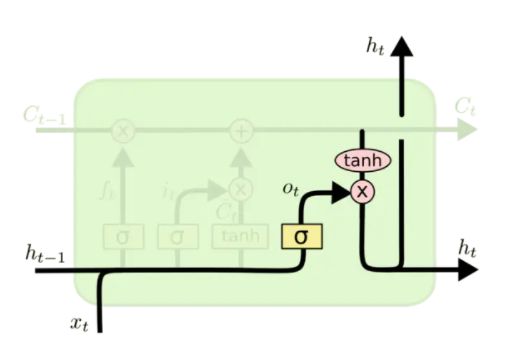
通过一个 sigmoid 函数来决定该层的输入 x t x_t xt 和上一层的输出 h t − 1 h_{t-1} ht−1 对该层的输出的影响。而通过一个 tanh 函数对更新后的 memory 进行处理,得到一个在 − 1 -1 −1 到 1 1 1 之间的值,两者相乘得到最终的输出部分。
以上便完成了LSTM的cell的计算过程。
3. pytorch中的RNN 和 LSTM module
3.1 torch.nn.RNN()
pytorch中的RNN模块实现了一个多层的RNN结构,其数学表示如下:
h t = f ( W i h x t + b i h + W h h h ( t − 1 ) + b h h ) h_{t}=f \left(W_{i h} x_{t}+b_{i h}+W_{h h} h_{(t-1)}+b_{h h}\right) ht=f(Wihxt+bih+Whhh(t−1)+bhh)
其中, h t h_t ht 为 t t t 时刻隐藏层的状态, x t x_t xt 为 t t t 时刻的输入, f f f 只能是 tanh \tanh tanh 或者 sigmoid 函数。其参数如下:
- input_size - 输入 x x x 中特征的数量,即向量 x x x 的维度,并不是指序列的长度。必须给定
- hidden_size - 隐藏状态 h h h 的特征数,即隐藏层中节点的个数。必须给定
- num_layers - 循环层数,即前文所述的模块 A A A 向上堆叠的层数,必须给定
- nonlinearity - 输出激活函数,可选’tanh’ 或 ‘relu’。 默认: ‘tanh’
- bias - 如果False,则该层不使用偏差权重 b i h b_{ih} bih 和 b h h b_{hh} bhh 。默认:True
- batch_first – 如果True,则输入和输出张量作为(batch, seq, feature)而不是(seq, batch, feature) 提供。默认:False
- dropout - 如果非零,则在除最后一层之外的每个 RNN层的输出上引入一个Dropout层。默认值:0
- bidirectional - 如果True,则是双向 RNN。默认:False
网络的输入数据解释如下:
- input - 形如 ( L , N , H i n ) \left(L, N, H_{i n}\right) (L,N,Hin) 的 Tensor 当 batch_first=False,或者 ( N , L , H i n ) \left(N,L, H_{i n}\right) (N,L,Hin) 的 Tensor 当 batch_first=True.
- h_0 - 形如 ( D ∗ num_layers , N , H out ) \left(D * \text{num\_layers}, N, H_{\text {out}}\right) (D∗num_layers,N,Hout) 的 Tensor,给出隐藏层的初始状态。
其中:
N = batch size L = sequence length D = 2 if bidirectional = True otherwise 1 H in = input_size H out = hidden_size \begin{aligned} N &=\text { batch size } \\ L &=\text { sequence length } \\ D &=2 \text { if bidirectional }=\text { True otherwise } 1 \\ H_{\text {in }} &=\text { input\_size } \\ H_{\text {out }} &=\text { hidden\_size } \end{aligned} NLDHin Hout = batch size = sequence length =2 if bidirectional = True otherwise 1= input_size = hidden_size
网络的输出数据解释如下:
- output - 形如 ( L , N , D ∗ H out ) \left(L, N, D * H_{\text {out }}\right) (L,N,D∗Hout ) 的 Tensor 当 batch_first=False,或者 ( N , L , D ∗ H out ) \left(N,L, D * H_{\text {out }}\right) (N,L,D∗Hout ) 的 Tensor 当 batch_first=True.
- h_n - 形如 ( D ∗ num_layers , N , H out ) \left(D * \text{num\_layers}, N, H_{\text {out}}\right) (D∗num_layers,N,Hout) 的 Tensor,给出隐藏层的最终状态。
用例:
rnn = nn.RNN(10, 20, 2) # input_size = 10; hidden_size = 20; num_layers = 2
input_ = torch.randn(5, 3, 10) # sequence length = 5; batch size = 3; input_size = 10;
h0 = torch.randn(2, 3, 20) # D = 1; D∗num_layers = 2; batch size = 3; hidden_size = 20;
output, hn = rnn(input_, h0)
最后,关于 input_size 、hidden_size 和 sequence length 这几个量,首先想象一个普通的神经网络如下图,
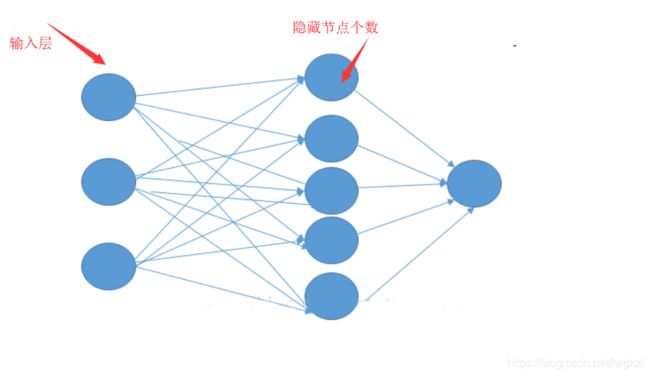
我们将这个图贴在xz平面,并且向y轴方向复制,那么复制的次数就是序列的长度 sequence length,此时相当于RNN沿着时间维度扩展(权值矩阵相同,因为是复制过去的),而 input_size 就是图中输入层节点的数量,或者说是输入向量 x i x_i xi 的维度,hidden_size 就是隐藏节点的个数,例如,在下图中:

图被复制了三次,那么sequence length = 3,而显然 input_size = 3,hidden_size = 5。
3.2 torch.nn.LSTM()
lstm里,层与层之间传递的是输出 h t h_t ht ,同一层内传递的细胞状态(即memory) C i C_i Ci,导致它和RNN有一些区别。
同理,我们写出LSTM的运算过程如下:
i t = σ ( W i i x t + b i i + W h i h t − 1 + b h i ) f t = σ ( W i f x t + b i f + W h f h t − 1 + b h f ) g t = tanh ( W i g x t + b i g + W h g h t − 1 + b h g ) o t = σ ( W i o x t + b i o + W h o h t − 1 + b h o ) c t = f t ⊙ c t − 1 + i t ⊙ g t h t = o t ⊙ tanh ( c t ) \begin{aligned} i_{t} &=\sigma\left(W_{i i} x_{t}+b_{i i}+W_{h i} h_{t-1}+b_{h i}\right) \\ f_{t} &=\sigma\left(W_{i f} x_{t}+b_{i f}+W_{h f} h_{t-1}+b_{h f}\right) \\ g_{t} &=\tanh \left(W_{i g} x_{t}+b_{i g}+W_{h g} h_{t-1}+b_{h g}\right) \\ o_{t} &=\sigma\left(W_{i o} x_{t}+b_{i o}+W_{h o} h_{t-1}+b_{h o}\right) \\ c_{t} &=f_{t} \odot c_{t-1}+i_{t} \odot g_{t} \\ h_{t} &=o_{t} \odot \tanh \left(c_{t}\right) \end{aligned} itftgtotctht=σ(Wiixt+bii+Whiht−1+bhi)=σ(Wifxt+bif+Whfht−1+bhf)=tanh(Wigxt+big+Whght−1+bhg)=σ(Wioxt+bio+Whoht−1+bho)=ft⊙ct−1+it⊙gt=ot⊙tanh(ct)
其中,各种变量和前文所述一样, ⊙ \odot ⊙ 代表 element-wise product。网络的参数如下:
- input_size - 输入 x x x 中特征的数量,即向量 x x x 的维度,并不是指序列的长度。必须给定
- hidden_size - 隐藏状态 h h h 的特征数,即隐藏层中节点的个数。必须给定
- num_layers - 循环层数,即前文所述的模块 A A A 向上堆叠的层数,必须给定
- nonlinearity - 输出激活函数,可选’tanh’ 或 ‘relu’。 默认: ‘tanh’
- bias - 如果False,则该层不使用偏差权重 b i h b_{ih} bih 和 b h h b_{hh} bhh 。默认:True
- batch_first – 如果True,则输入和输出张量作为(batch, seq, feature)而不是(seq, batch, feature) 提供。默认:False
- dropout - 如果非零,则在除最后一层之外的每个 RNN层的输出上引入一个Dropout层。默认值:0
- bidirectional - 如果True,则是双向 RNN。默认:False
- proj_size - 如果大于 0,将使用具有相应大小投影的LSTM。默认:0
网络的输入数据解释如下:
- input - 形如 ( L , N , H i n ) \left(L, N, H_{i n}\right) (L,N,Hin) 的 Tensor 当 batch_first=False,或者 ( N , L , H i n ) \left(N,L, H_{i n}\right) (N,L,Hin) 的 Tensor 当 batch_first=True.
- h_0 - 形如 ( D ∗ num_layers , N , H out ) \left(D * \text{num\_layers}, N, H_{\text {out}}\right) (D∗num_layers,N,Hout) 的 Tensor,给出隐藏层的初始状态。
- c_0 - 形如 ( D ∗ num_layers , N , H cell ) \left(D * \text{num\_layers}, N, H_{\text {cell}}\right) (D∗num_layers,N,Hcell) 的 Tensor,给出cell的初始状态(初始的memory)。
其中:
N = batch size L = sequence length D = 2 if bidirectional = True otherwise 1 H in = input_size H cell = hidden_size H out = proj_size if proj_size > 0 otherwise hidden_size \begin{aligned} N &=\text { batch size } \\ L &=\text { sequence length } \\ D &=2 \text { if bidirectional }=\text { True otherwise } 1 \\ H_{\text {in }} &=\text { input\_size } \\ H_{\text {cell}} &=\text { hidden\_size } \\ H_{\text {out}} &= \text{proj\_size if proj\_size} > 0 \text{ otherwise hidden\_size} \end{aligned} NLDHin HcellHout= batch size = sequence length =2 if bidirectional = True otherwise 1= input_size = hidden_size =proj_size if proj_size>0 otherwise hidden_size
网络的输出数据解释如下:
- output - 形如 ( L , N , D ∗ H out ) \left(L, N, D * H_{\text {out }}\right) (L,N,D∗Hout ) 的 Tensor 当 batch_first=False,或者 ( N , L , D ∗ H out ) \left(N,L, D * H_{\text {out }}\right) (N,L,D∗Hout ) 的 Tensor 当 batch_first=True.
- h_n - 形如 ( D ∗ num_layers , N , H out ) \left(D * \text{num\_layers}, N, H_{\text {out}}\right) (D∗num_layers,N,Hout) 的 Tensor,给出隐藏层的最终状态。
- c_n - 形如 ( D ∗ num_layers , N , H cell ) \left(D * \text{num\_layers}, N, H_{\text {cell}}\right) (D∗num_layers,N,Hcell) 的 Tensor,给出cell的最终状态(最终记忆的memory)。
用例:
rnn = nn.LSTM(10, 20, 2)
input_ = torch.randn(5, 3, 10)
h0 = torch.randn(2, 3, 20)
c0 = torch.randn(2, 3, 20)
output, (hn, cn) = rnn(input_, (h0, c0))
4. Reference
- 台大李宏毅ML2020课件-RNN (v2) Recurrent Neural Network
- https://blog.csdn.net/zhaojc1995/article/details/80572098
- 链式法则
- 理解 LSTM 网络
- http://deeplearning.net/tutorial/lstm.html
- pytorch api
- https://blog.csdn.net/lwgkzl/article/details/88717678