图像的浅层特征与深度特征_图像LBP特征
LBP特征属于一种纹理特征,该算法在1996年由Ojala等提出,在2002年对算法进行了改进,提出了均衡模式LBP编码和旋转不变性LBP编码。该算法整体来说还是比较简单。但是,根据LBP编码之后的结果对图像进行分类的效果还是比较好。可以用于人脸分类,也可以用于其他对象的基于纹理特征的分类,通常采用LBP编码之后,需要对编码后的图像进行分块,计算每一块的直方图,然后将所有的直方图连接成一个大的直方图,其实就是一维向量。图像就用这个一维向量来表示。在进行分类的时候,可以采用SVM或者KNN等分类算法实现。
LBP的编码方式还是简单,图1是从原始论文中截图的编码示意图。具体的公式在这里就不详细介绍了,简单说一下方法。首先在图像上取一块邻域,比如3X3大小的区域,然后依次比较周围八个像素值与中间像素值的灰度值大小,如果大于等于中间像素值,则赋值为“1”,否则赋值为“0”。请见图1(a)和图1(b)。然后将得到的“1”和“0”连接起来,得到一个二进制串。至于这个二进制串从哪个位置开始,没有规定。对于同一幅图像,自己规定一个统一的起点就可以了。如图1(b),从右下角开始,按照顺时针方式得到的二进制串为“10111000”,然后将这个二进制串转换成十进制,为“169”,将这个值代替原来3X3邻域的中间位置的像素值。

图1 LBP算法编码示意
原始的LBP编码不具有旋转不变性,而且,容易受到噪声干扰。所以,研究者对该算法进行了很多改进。作者在2002年提出了改进的方法,首先将原来的3X3区域改成圆形区域,利用圆形边界上的点与中心点进行大小比较,圆形边界上的点采用插值得到。其次,作者分析了二进制串从“1”到“0”或从“0”到“1”的变化次数,发现图像上的特征对于每一个二进制串的变化次数一般不操作2次,因此得到均衡模式LBP编码,该编码方式只有58种编码结果。其他变化次数操作2次的都归为第59种。此外,还提出一种旋转不变编码方式,就是将得到的二进制串进行依次移位操作,只取得到的最大值最为编码结果,由此得到旋转不变性编码。图2是圆形LBP编码示意图,图3是旋转不变编码结果,这种方式只有36种编码值。
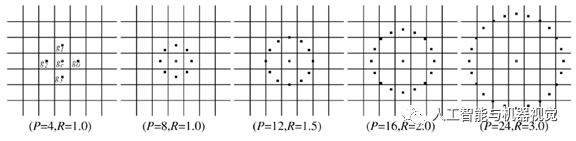
图2 圆形LBP邻域编码
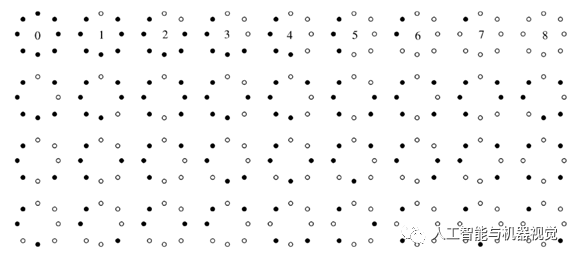
图3 旋转不变性36种编码结果
LBP算法体现的是图像局部纹理特征,该算法自从提出来以后,在google学术上可以看得到引用次数已经上万次了,证明该算法确实有一定的效果。对其进行改进的算法也很多。Spring出版了两本关于LBP方面的书《Computer Vision Using Local Binary Patterns》和《Local Binary Patterns: New Variants and Applications》也足以说明该算法的影响力。
LBP算法为什么有效?从LBP编码的方式来看,其实该算法利用的也是图像的梯度关系。对于图像而言,梯度反映了图像的变化,而且,梯度一般不受光照变化的影响,梯度对于同一类型图像而言,其变化是很小的。所以,利用图像像素值之间的梯度关系可以实现图像分类。其实,很多与图像处理有关的算法,都离不开图像的梯度。LBP算法类似于计算了邻域像素与中心像素的梯度大小联合分布。因此,基于梯度的描述算子的判别性比较高,利用梯度关系进行图像分类一般效果都比较好。
LBP算法很简单,但是,如果在LBP上进行算法改进,还是有很多改进空间。如果想要在这方面发表几篇文章,还是很有机会的。LBP的原理很简单,下面以具体的代码来实现LBP编码,有需要的可以借鉴下,在opencv里面也有LBP的编码代码。
#include#include #include#include#include#includeusing namespace std;using namespace cv;///原始LBP编码void originLBP(Mat src,Mat dst){ for(int i=1;i-1;i++) { for(int j=1;j-1;j++) { unsigned char center = src.at(i,j); unsigned char lbpCode = 0; lbpCode |= (src.at(i-1,j-1) > center) << 7; lbpCode |= (src.at(i-1,j ) > center) << 6; lbpCode |= (src.at(i-1,j+1) > center) << 5; lbpCode |= (src.at(i ,j+1) > center) << 4; lbpCode |= (src.at(i+1,j+1) > center) << 3; lbpCode |= (src.at(i+1,j ) > center) << 2; lbpCode |= (src.at(i+1,j-1) > center) << 1; lbpCode |= (src.at(i ,j-1) > center) << 0; dst.at(i-1,j-1) = lbpCode; } }}template staticinline void elbp_(InputArray _src, OutputArray _dst, int radius, int neighbors) { //get matrices Mat src = _src.getMat(); // allocate memory for result _dst.create(src.rows-2*radius, src.cols-2*radius, CV_32SC1); Mat dst = _dst.getMat(); // zero dst.setTo(0); for(int n=0; n { // sample points float x = static_cast(radius * cos(2.0*CV_PI*n/static_cast(neighbors))); float y = static_cast(-radius * sin(2.0*CV_PI*n/static_cast(neighbors))); // relative indices int fx = static_cast(floor(x)); int fy = static_cast(floor(y)); int cx = static_cast(ceil(x)); int cy = static_cast(ceil(y)); // fractional part float ty = y - fy; float tx = x - fx; // set interpolation weights float w1 = (1 - tx) * (1 - ty); float w2 = tx * (1 - ty); float w3 = (1 - tx) * ty; float w4 = tx * ty; // iterate through your data for(int i=radius; i < src.rows-radius;i++) { for(int j=radius;j < src.cols-radius;j++) { // calculate interpolated value float t = static_cast(w1*src.at<_tp>(i+fy,j+fx) + w2*src.at<_tp>(i+fy,j+cx) + w3*src.at<_tp>(i+cy,j+fx) + w4*src.at<_tp>(i+cy,j+cx)); // floating point precision, so check some machine-dependent epsilon dst.at(i-radius,j-radius) += ((t > src.at<_tp>(i,j)) || (std::abs(t-src.at<_tp>(i,j)) < std::numeric_limits::epsilon())) << n; } } }}static void elbp(InputArray src, OutputArray dst, int radius, int neighbors){ int type = src.type(); switch (type) { case CV_8SC1: elbp_(src,dst, radius, neighbors); break; case CV_8UC1: elbp_(src, dst, radius, neighbors); break; case CV_16SC1: elbp_(src,dst, radius, neighbors); break; case CV_16UC1: elbp_(src,dst, radius, neighbors); break; case CV_32SC1: elbp_(src,dst, radius, neighbors); break; case CV_32FC1: elbp_(src,dst, radius, neighbors); break; case CV_64FC1: elbp_(src,dst, radius, neighbors); break; default: string error_msg = format("Using Original Local Binary Patterns for feature extraction only works on single-channel images (given %d). Please pass the image data as a grayscale image!", type); CV_Error(Error::StsNotImplemented, error_msg); break; }}//圆形LBPMat circularLBP(InputArray src, int radius, int neighbors) { Mat dst; elbp(src, dst, radius, neighbors); return dst;}//计算跳变次数int getHopTimes(int n){ int count = 0; bitset<8> binaryCode = n; for(int i=0;i<8;i++) { if(binaryCode[i] != binaryCode[(i+1)%8]) { count++; } } return count;}///均衡模式LBP编码Mat uniformPatternLBP(Mat src,int radius,int neighbors){ Mat dst; //建立映射表 uchar temp = 1; uchar table[256] = {0}; for(int i=0;i<256;i++) { if(getHopTimes(i)<3) { table[i] = temp; temp++; } } //调用圆形LBP编码 Mat CircularDst = circularLBP(src, radius, neighbors); //根据映射表重新确定dst的值 Mat dst_abs; convertScaleAbs(CircularDst,dst_abs);//使用线性变换转换输入数组元素成8位无符号整型 //根据映射表重新确定dst的值 int rows = dst_abs.rows; int cols = dst_abs.cols; for(int i = 0;i { uchar* data = dst_abs.ptr(i); for(int j = 0;j < cols;j++) { data[j] = table[data[j]]; } } convertScaleAbs(dst_abs,dst);//使用线性变换转换输入数组元素成8位无符号整型 return dst;}int* rotation_invariant_mapping(int range,int num_sp)//range=256,num_sp=8{ int newMax,rm,r; int tmpMap[256]; int Mapping[256]; newMax = 0; for (int i = 0 ; i < range ; i++) { rm = i; r = i; for (int j = 0 ; j < num_sp -1 ;j++) { //将r向左循环移动一位,当r超过num_sp位时,舍弃 r = r << 1; if (r > range -1) { r = r - (range -1); } //printf("%d,%d\n",r,rm); if (r < rm) { rm = r; } } if (tmpMap[rm] < 0) { tmpMap[rm] = newMax; newMax++; } Mapping[i] = tmpMap[rm]; } return Mapping;}Mat rotationInvariantOfMapLBP(Mat img,int radius,int neighbors){ uchar RITable[256]; int* test; test = rotation_invariant_mapping(256,8); for(int i = 0;i < 256;i++) { RITable[i] = test[i]; } Mat result; result.create(img.rows - 2*radius, img.cols -2*radius , img.type()); result.setTo(0); for(int i = radius; i { for(int j = radius;j { uchar center = img.at(i, j); uchar code = 0; code |= (img.at(i-radius, j-radius) >= center)<<7; code |= (img.at(i-radius, j) >= center)<<6; code |= (img.at(i-radius, j+radius) >= center)<<5; code |= (img.at(i, j+radius) >= center)<<4; code |= (img.at(i+radius, j+radius) >= center)<<3; code |= (img.at(i+radius, j) >= center)<<2; code |= (img.at(i+radius, j-radius) >= center)<<1; code |= (img.at(i, j-radius) >= center)<<0; result.at(i -radius, j -radius) = RITable[code]; } } return result;}int main(int argc,char **argv){ Mat src,temp; src = imread("E:\\lena.bmp",0); namedWindow("原图",0); imshow("原图",src); Mat oriDst = Mat(Size(src.size()), CV_8UC1); originLBP(src, oriDst); Mat circularDst = Mat(Size(src.size()),CV_8UC1); circularDst = circularLBP(src,3,8); Mat origin_dst_abs; convertScaleAbs(circularDst,origin_dst_abs); Mat UniformDst = Mat(Size(src.size()),CV_8UC1); UniformDst = uniformPatternLBP(src,3,8); Mat uniform_dst_abs; convertScaleAbs(UniformDst,uniform_dst_abs); Mat rotationInvariantDst = Mat(Size(src.size()),CV_8UC1); rotationInvariantDst = rotationInvariantOfMapLBP(src,3,8); Mat rotationInvariant_dst_abs; convertScaleAbs(rotationInvariantDst,rotationInvariant_dst_abs); namedWindow("oriDst", 0); imshow("oriDst", oriDst); namedWindow("circularDst",0); imshow("circularDst",origin_dst_abs); namedWindow("UniformDst",0); imshow("UniformDst",uniform_dst_abs); namedWindow("rotationInvariantDst",0); imshow("rotationInvariantDst",rotationInvariant_dst_abs); waitKey(0);} 下面是运行结果图。

图4 原图

图5 原始LBP编码
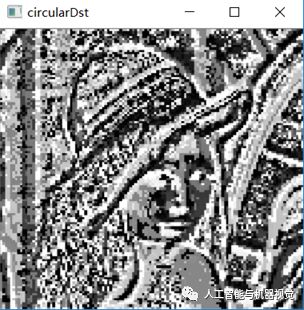
图6 圆形LBP编码

图7 均衡模式LBP编码

图8 旋转不变LBP编码