unityC# 调用python深度学习实现图片分类
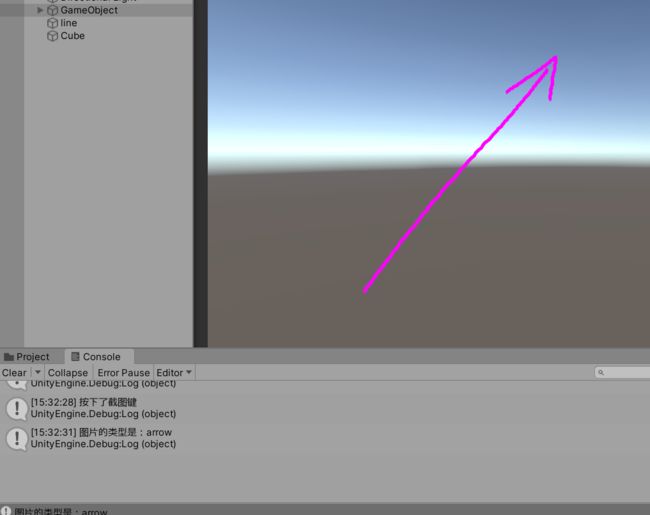
最近面临一个问题,需要在unity3D中将手绘的指令识别出来,目前就很简单的三个指令,顺时针旋转,逆时针旋转,和箭头。
我就想到了使用深度学习来给这三个指令分类,这其中要用到python的pytorch。
在两个程序如何通信的问题上,有个朋友告诉我可以用socket使两个程序通信,好就用socket
最后的效果就是这样的

unity C#脚本代码如下(写的很粗糙,主要是实现功能(~ ̄(OO) ̄)ブ
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using System.Net;
using System.Net.Sockets;
using System;
using System.Threading;
using System.Text;
using System.IO;
public class drawline : MonoBehaviour
{
public Camera ShootCamera; //拍照相机
public GameObject linePrefab;
// 线条渲染器
private LineRenderer line;
// 顶点下标
private int i;
public GameObject obj_Parent;
private bool iscon = false;
//创建套接字对象
private Socket m_socket;
private byte[] m_sendBuff;
private byte[] m_recvBuff;
private AsyncCallback m_recvCb;
//private string sendstr = "歪歪歪,收得到吗";
private void Start()
{
m_recvBuff = new byte[1024];
m_sendBuff = new byte[1024];
m_recvCb = new AsyncCallback(RecvCallBack);
//*******************************************************************
//服务器
Socket lfd = new Socket(AddressFamily.InterNetwork, SocketType.Stream, ProtocolType.Tcp);
//创建IP地址和端口号对象
IPAddress ip = IPAddress.Any; //IPAddress.Parse("127.0.0.1");
//端口号
IPEndPoint point = new IPEndPoint(ip, 6666);
//让负责监听的socket绑定IP地址跟端口号
lfd.Bind(point);
Debug.Log("服务器监听启动");
lfd.Listen(5);
Thread th = new Thread(Listen);
th.IsBackground = true;
th.Start(lfd);
}
void Listen(object o)
{
Socket lfd = o as Socket;
while (true)
{
Socket rfd = lfd.Accept();
Debug.Log(rfd.RemoteEndPoint.ToString() + "已连接了");
m_socket = rfd;
iscon = true;
}
}
void Update()
{
// 鼠标左键按下瞬间
if (Input.GetMouseButtonDown(0))
{
GameObject go = Instantiate(linePrefab, linePrefab.transform.position, transform.rotation);
line = go.GetComponent<LineRenderer>();
line.transform.parent = GameObject.Find(obj_Parent.name).transform;
// 设置材质
// line.material = new Material(Shader.Find("Particles/Additive"));
// 设置颜色
line.startColor = Color.red;
line.endColor = Color.red;
// 设置宽度
//line.startWidth = 0.1f;
//line.endWidth = 0.1f;
i = 0;
}
// 鼠标左键按下期间
if (Input.GetMouseButton(0))
{
i++;
// 设置顶点数
line.positionCount = i;
// 设置顶点位置
line.SetPosition(i - 1, Camera.main.ScreenToWorldPoint(
new Vector3(Input.mousePosition.x, Input.mousePosition.y, 10)));
}
//按下s键,保存图片并将图片名字发送给深度学习模型
if(Input.GetKeyDown("s"))
{
screenShoot();
}
//按下d键,清空当前的轨迹
if (Input.GetKeyDown("d"))
{
Btn_Close();
}
}
private void screenShoot()
{
Camera camera = ShootCamera;
Rect rect = new Rect(0, 0, Screen.width, Screen.height);
// 创建一个RenderTexture对象
RenderTexture rt = new RenderTexture((int)rect.width, (int)rect.height, 0);
// 临时设置相关相机的targetTexture为rt, 并手动渲染相关相机
camera.targetTexture = rt;
camera.Render();
// 激活这个rt, 并从中中读取像素。
RenderTexture.active = rt;
Texture2D t2D = new Texture2D((int)rect.width, (int)rect.height, TextureFormat.RGB24, false);
t2D.ReadPixels(rect, 0, 0);// 注:这个时候,它是从RenderTexture.active中读取像素
t2D.Apply();
// 重置相关参数,以使用camera继续在屏幕上显示
camera.targetTexture = null;
RenderTexture.active = null;
Destroy(rt);
// 最后将这些纹理数据,成一个png图片文件
byte[] bytes = t2D.EncodeToPNG();
string nowtime = DateTime.Now.Year.ToString() + DateTime.Now.Month.ToString() + DateTime.Now.Hour.ToString() + DateTime.Now.Minute.ToString() + DateTime.Now.Second.ToString();
File.WriteAllBytes("Assets/gesture/" + nowtime + ".png", bytes);
Debug.Log("按下了截图键" );
//socket发送信息
m_sendBuff = Encoding.UTF8.GetBytes(nowtime);
NetworkStream netstream = new NetworkStream(m_socket);
netstream.Write(m_sendBuff, 0, m_sendBuff.Length);
}
private void FixedUpdate()
{
if (iscon == true)
{
m_socket.BeginReceive(m_recvBuff, 0, m_recvBuff.Length, SocketFlags.None, m_recvCb, this);
}
}
//接收到信息回调
void RecvCallBack(IAsyncResult ar)
{
var len = m_socket.EndReceive(ar);
byte[] msg = new byte[len];
Array.Copy(m_recvBuff, msg, len);
string msgStr = System.Text.Encoding.UTF8.GetString(msg);
Debug.Log("图片的类型是:"+ msgStr);
for (int i = 0; i < m_recvBuff.Length; ++i)
{
m_recvBuff[i] = 0;
}
}
//删除obj_Parent下面的全部子物体,清空图画内容
public void Btn_Close()
{
for (int i = 0; i < obj_Parent.transform.childCount; i++)
{
Destroy(obj_Parent.transform.GetChild(i).gameObject);
}
}
}
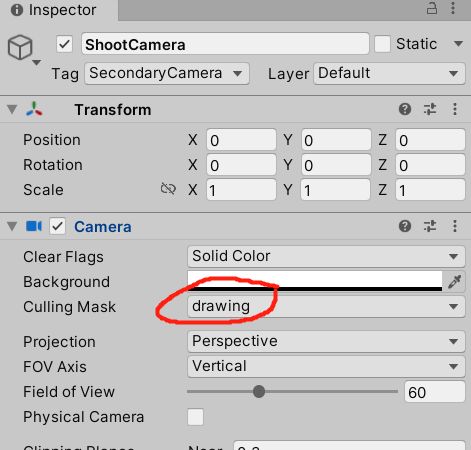
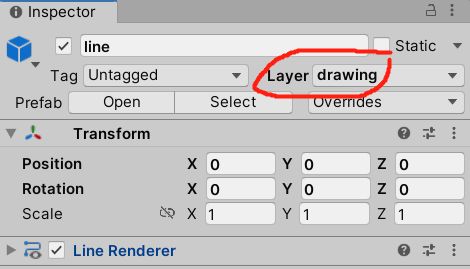
负责截图的相机放在主相机的子对象下,可以设置一下层级,让截图相机只能看到线条,可以不被其他游戏对象干扰,截出来的图片干净一点

下面是python的代码(深度学习模型就不放出来了,而且我刚学python(°ー°〃)
classes = ['Cclockwise', 'arrow', 'clockwise']
# 读取权重
checkpoint = torch.load('E:/pyCode/weightsave.t7')
net.load_state_dict(checkpoint['state'], strict=False) # 从字典中依次读取
net.eval()
issendtime = False
piclass = ''
# 分类单张图片
def classfypic(name):
global piclass, issendtime
img = cv2.imread('E:/unitylearn/draw/Assets/gesture/'+name+'.png')
# cv2.imshow('img', img)
# cv2.waitKey()
img = img[:, :, (2, 1, 0)]/255.
img = torch.FloatTensor(img).unsqueeze(0).permute(0, 3, 1, 2)
out = net(img)
out = nn.Softmax()(out)
cls = torch.argmax(out, dim=1)
piclass = classes[cls]
print('类别:', classes[cls])
issendtime = True
# ****************************************************************************************************
# 网络通信
instring = ''
def client_sent(sock):
global piclass,issendtime
while True:
if issendtime:
sock.send(piclass.encode('UTF-8'))
issendtime = False
def client_recv(sock):
while True:
global instring
instring = sock.recv(1024) # 接收数据
if instring != '':
print('图片名字为'+instring.decode('UTF-8'))
classfypic(instring.decode('UTF-8'))
instring = ''
clf = socket.socket()
clf.connect(('127.0.0.1', 6666))
print('创建连接')
th_send = threading.Thread(target=client_sent, args=(clf,)) # 发送消息的线程
th_send.start()
th_recv = threading.Thread(target=client_recv, args=(clf,)) # 接受消息线程
th_recv.start()
th_send.join()
th_recv.join()
可以实现通信,只是效率有点低,不知道是不是我的电脑太垃圾的缘故,没有好的显卡不能使用cuda来训练,一训练就是半天时间┗( T﹏T )┛
仅仅实现功能,仅供参考