【深度学习】深度学习小结01
文章目录
- 1. 基本概念
-
- 1.1 机器学习与深度学习
- 1.2 概述
- 2. 神经网络
-
- 2.1 神经网络训练
- 2.2 神将网络的设计原则
-
- 2.2.1 过拟合与正则化
-
- 2.2.2.1 过拟合
- 2.2.2.2 正则化
- 2.3 简单的神经网络的模型(代码示例)
1. 基本概念
1.1 机器学习与深度学习
人工智能、机器学习、神经网络、深度学习四者关系

1.2 概述
人工智能
人工智能是类人思考、类人行为,理性的思考、理性的行动。人工智能的基础是哲学、数学、经济学、神经科学、心理学、计算机工程、控制论、语言学。人工智能的发展,经过了孕育、诞生、早期的热情、现实的困难等数个阶段;
人工智能是什么?
机器学习
根据有无标记(label)机器学习可分为:
- 监督学习:
- 就是通过已有的训练样本(即已知数据以及其对应的输出)去训练得到一个最优模型(这个模型属于某个函数的集合,最优则表示在某个评价准则下是最佳的),再利用这个模型将所有的输入映射为相应的输出,对输出进行简单的判断从而实现分类的目的,也就具有了对未知数据进行分类的能力。
- 简单来说就是通过对有标记的数据的学习,建立一个模型函数来预测新数据的标记。
- 典型的例子就是KNN、SVM。
- 无监督学习:
- 它与监督学习的不同之处,在于我们事先没有任何训练样本,而需要直接对数据进行建模。
- 简单来说就是通过对无标记的训练数据的学习,揭示数据的内在性质及规律。
- 无监督学习里典型的例子就是聚类了。
机器学习入门好文,强烈推荐
神经网络
神经网络是一门重要的机器学习技术,是机器学习中的一种模型,是一种模仿动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的。
神经网络按照层数多少可分为:
- 单层神经网络(感知机)
- 两层神经网络(多层感知机)
- 多层神经网络(深度学习)
感知机
感知机是最简单的人工神经网络——只有一个神经元的单层神经网络,可以完成简单的线性分类任务。

可以看到,一个感知器有如下组成部分:
通过6个问题进一步理解
(1) 感知机的定义是什么?
感知机(perceptron)是二类分类的线性分类模型,其输入为实例的特征向量,输出为实例的类别。
(2) 感知机的取值是什么?
取+1和-1二值。
(3) 感知机对应于输入空间(特征空间)中的什么?
感知机对应于输入空间中将实例划分为正负两类的分离超平面,属于判别模型。
(4) 感知机学习的目的是什么?
感知机学习旨在求出将训练数据进行线性划分的分离超平面,为此,导入基于误分类的损失函数,利用梯度下降法对损失函数进行极小化,求得感知机模型。
(5) 感知机学习算法有什么特点?
感知机学习算法具有简单,并且易于实现的特点,分为原始形式和对偶形式。
(6) 什么是感知机预测?
感知机预测是用学习得到的感知机模型对新的输入实例进行分类。它是神经网络与支持向量机的基础。
说明:
上述超平面是指在N维线性空间中维度为N-1的子空间。二维空间中的超平面是一条线,三位空间的超平面是一个二维平面,四维空间的超平面是一个三位体。
什么是感知机?
零基础入门深度学习(1) - 感知器
神经网络——最易懂最清晰的一篇文章
四种基本的神经网络
深度学习
深度学习是源于人工神经网络的研究,是基于人工神经网络的机器学习方法族的一部分。学习可以是有监督的、半监督的或无监督的,通常以发现数据的分布式特征表示。
一文看懂深度学习(白话解释+8个优缺点+4个典型算法)
2. 神经网络
2.1 神经网络训练
通过调整隐层和输出层的参数,使得神经网络的计算结果与真是结果尽量接近
训练过程:
- 正向传播
- 反向传播
【深度学习】正向传播、反向传播与优化函数
2.2 神将网络的设计原则
- 调整网络拓扑结构
- 选择合适的激活函数
- 选择合适的损失函数
激活函数和损失函数
2.2.1 过拟合与正则化
2.2.2.1 过拟合
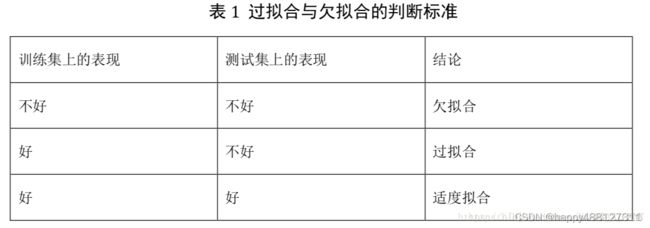
过拟合是指模型过度逼近训练数据,影响力模型的泛化能力。表现为:在训练集上误差很小,在验证数据集上误差很大。一般可以通过正则化来解决。
除了过拟合外,还有欠拟合,即训练特征过少,拟合函数无法有效逼近训练集,造成误差很大。欠拟合一般可以通过增加训练样本或者模型复杂的来解决。
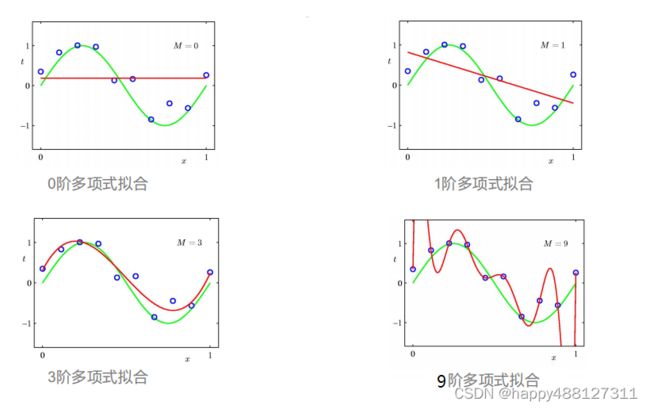
由上图可以看出:
- 0阶多项式和1阶多项式:模型过于简单不能 拟合出sin函数的形状 这种现象叫做欠拟合
- 3阶多项式:刚好拟合出sin函数的图像 这样的拟合效果是理想中的效果
- 9阶多项式:模型过于复杂,虽然把图中所有的数据点都记住了 ,但是模型自身波动很大,对于新的数据不能有好的预测效果,泛化能力差,这种现象叫过拟合。
2.2.2.2 正则化
假设上面过拟合图中的曲线方程如下

图4就是一个9次多项式,为了防止过拟合,将其转化为三次多项式,即设法将高次项系数变为0。此时需要给损失函数中增加对高次项的惩罚,即在原损失函数上添加 C4w42 + C5w52 + … + C9w92 ,C为常数。此时用损失函数训练出来的结果w4 - w9都约等于0,即可以认为是一个三次多项式。
正则化就是在损失函数中对不想要的部分加入惩罚项,常见的正则化有L1 和 L2
过拟合
过拟合(定义、出现的原因4种、解决方案7种)
【深度学习】正则化(超详解)
2.3 简单的神经网络的模型(代码示例)
一个简单的神经网络模型

import time
import torch
import torchvision.datasets
from torch import nn
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from torch.nn import Sequential, Conv2d, MaxPool2d, Flatten, Linear
# 自定义网络
class MyNN(nn.Module):
def __init__(self) -> None:
super().__init__()
self.model = Sequential(
Conv2d(3, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 32, 5, padding=2),
MaxPool2d(2),
Conv2d(32, 64, 5, padding=2),
MaxPool2d(2),
Flatten(),
Linear(1024, 64),
Linear(64, 10)
)
def forward(self, x):
x = self.model(x)
return x
# 搭建网络进行训练
# 1. 准备数据集
train_data = torchvision.datasets.CIFAR10("dataset", train=True, transform=torchvision.transforms.ToTensor(),
download=True)
test_data = torchvision.datasets.CIFAR10("dataset", train=False, transform=torchvision.transforms.ToTensor(),
download=True)
# 查看数据长度
print("训练数据集长度为:{}".format(len(train_data)))
print("测试数据集长度为:{}".format(len(test_data)))
# 2. 加载数据集
train_dataLoader = DataLoader(train_data, batch_size=64)
test_dataLoader = DataLoader(test_data, batch_size=64)
# 3. 创建网络模型
demo_nn = MyNN()
# 4. 损失函数
loss_fn = nn.CrossEntropyLoss()
# 5. 优化器
learning_rate = 0.01
# 随机梯度下降
optimal = torch.optim.SGD(demo_nn.parameters(), lr=learning_rate)
# 记录训练次数
count_train = 0
# 记录测试次数
total_test = 0
# 训练轮数
epoch = 50
# 使用tensorboard
writer = SummaryWriter("loss-train")
start_time = time.time()
for i in range(epoch):
print("---------开始第{}轮训练---------".format(i + 1))
# 训练步骤开始
demo_nn.train() # 将网络设置为训练模式,当网络包含 Dropout, BatchNorm时必须设置,其他时候无所谓
for data in train_dataLoader:
imgs, targets = data
output = demo_nn(imgs)
# 优化模型
loss = loss_fn(output, targets)
# 梯度清零
optimal.zero_grad()
# 反向传播
loss.backward()
# 训练
optimal.step()
# 纪录训练次数
count_train += 1
# item()函数会直接输出值,比如tensor(5),会输出5
if count_train % 100 == 0:
# 记录时间
end_time = time.time()
print(end_time - start_time)
print("训练次数为{}时,loss值为{}".format(count_train, loss.item()))
# 记录训练loss值
writer.add_scalar("train_loss", loss.item(), count_train)
total_test = 0
total_accuracy = 0
# 将网络设置为测试模式,当网络包含 Dropout, BatchNorm时必须设置,其他时候无所谓
demo_nn.eval()
with torch.no_grad():
for data in test_dataLoader:
imgs, targets = data
output = demo_nn(imgs)
loss = loss_fn(output, targets)
# 记录测试数据集loss和
total_test += loss.item()
# 求预测结果精确度之和
# argmax:求最大值的下标,1按行求,0按列求
accuracy = (output.argmax(1) == targets).sum()
total_accuracy += accuracy
print("测试集的整体loss为{}".format(total_test))
print("测试集的整体准确度为{}".format(total_accuracy / len(test_data)))
writer.add_scalar("accuracy", total_accuracy / len(test_data), i)
# 记录测试loss,
writer.add_scalar("test_loss", total_test, i)
# 保存每一步训练的模型
torch.save(demo_nn, "train-model/train_model_{}.pth".format(i))
print("第{}次训练模型已保存".format(i + 1))
writer.close()
注:本博客内容来教材和自网络整理,仅作为学习笔记记录,不用做其他用途。