矩阵基础概念之行列式与秩
矩阵基础概念及运算
1. 矩阵的线性运算
性质 1.1 设矩阵 A , B , C , D A,B,C,D A,B,C,D为同型矩阵, O O O为零矩阵, k , l k,l k,l为任意常数,则有
- A + B = B + A A+B = B+A A+B=B+A (交换律)
- ( A + B ) + C = A + ( B + C ) (A+B)+C = A+(B+C) (A+B)+C=A+(B+C) (结合律)
- A + O = O + A = A A+O = O+A = A A+O=O+A=A
- k ( A + B ) = k A + k B k(A+B) = kA+ kB k(A+B)=kA+kB
- ( k + l ) A = k A + l A (k+l)A = kA + lA (k+l)A=kA+lA
- ( k l ) A = k ( l A ) (kl)A = k(lA) (kl)A=k(lA)
- ( − 1 ) A = − A , 0 A = O (-1)A = -A, 0A = O (−1)A=−A,0A=O
2. 矩阵的乘法运算
性质 2.1 设矩阵 A , B , C A,B,C A,B,C能满足相乘维度要求, k k k为常数, E E E为单位矩阵,则有
- ( A B ) C = A ( B C ) (AB)C=A(BC) (AB)C=A(BC)
- A ( B + C ) = A B + A C A(B+C) = AB + AC A(B+C)=AB+AC
- ( B + C ) A = B A + C A (B+C)A = BA + CA (B+C)A=BA+CA
- k ( A B ) = ( k A ) B = A ( k B ) k(AB)=(kA)B=A(kB) k(AB)=(kA)B=A(kB)
- E m A m × n = A m × n E n = A m × n E_mA_{m \times n} = A_{m \times n} E_n = A_{m \times n} EmAm×n=Am×nEn=Am×n
需要注意的是,矩阵乘法与算数乘法有以下几点不同:
- 一般的说 A B ≠ B A AB \neq BA AB̸=BA,即矩阵乘法不满足交换律
- 由 A B = O AB = O AB=O不能推出 A = O A=O A=O或 B = O B=O B=O,即两个非零矩阵的乘积可以是零矩阵
- 由 A B = A C AB=AC AB=AC且 A ≠ O A \neq O A̸=O,不能推出 B = C B=C B=C,即矩阵乘法不满足消去律
3. 矩阵的转置
性质 3.1 k k k为常数
- ( A T ) T = A (A^T)^T =A (AT)T=A
- ( A + B ) T = A T + B T (A+B)^T =A^T + B^T (A+B)T=AT+BT
- ( k A ) T = k A T (kA)^T = kA^T (kA)T=kAT
- ( A B ) T = B T A T (AB)^T = B^TA^T (AB)T=BTAT
定义 3.1 设 A A A为 n n n阶方阵,若 A T = A A^T = A AT=A,则称 A A A为对称阵;若 A T = − A A^T = -A AT=−A,则称 A A A为反对称阵。
4. 方阵的行列式
4.1 行列式计算方法
方法1 对角线规则(沙流氏规则)

三阶矩阵的行列式为每条红线上的元素的乘积之和,减去蓝线上元素乘积之和。
d e t ( A ) = ∣ a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 ∣ = a 11 a 22 a 33 + a 12 a 23 a 31 + a 13 a 21 a 32 − a 13 a 22 a 31 − a 11 a 23 a 32 − a 12 a 21 a 33 det(A) = \left | \begin{matrix} a_{11} & a_{12} & a_{13}\\ a_{21} & a_{22} & a_{23}\\ a_{31} & a_{32} & a_{33} \end{matrix} \right | =a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{13}a_{21}a_{32}-a_{13}a_{22}a_{31}-a_{11}a_{23}a_{32}-a_{12}a_{21}a_{33} det(A)=∣∣∣∣∣∣a11a21a31a12a22a32a13a23a33∣∣∣∣∣∣=a11a22a33+a12a23a31+a13a21a32−a13a22a31−a11a23a32−a12a21a33
方法2 分解降阶法(某一行(或列)每个元素和其代数余子式的乘积再乘以系数的和)
d e t ( A ) = ∣ a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 ∣ = a 11 a 22 a 33 + a 12 a 23 a 31 + a 13 a 21 a 32 − a 13 a 22 a 31 − a 11 a 23 a 32 − a 12 a 21 a 33 = ( − 1 ) 1 + 1 a 11 ∣ a 22 a 23 a 32 a 33 ∣ + ( − 1 ) 1 + 2 a 12 ∣ a 21 a 23 a 31 a 33 ∣ + ( − 1 ) 1 + 3 a 13 ∣ a 21 a 22 a 31 a 32 ∣ \begin{aligned} det(A) &= \left | \begin{matrix} a_{11} & a_{12} & a_{13}\\ a_{21} & a_{22} & a_{23}\\ a_{31} & a_{32} & a_{33} \end{matrix} \right | \\ &=a_{11}a_{22}a_{33}+a_{12}a_{23}a_{31}+a_{13}a_{21}a_{32}-a_{13}a_{22}a_{31}-a_{11}a_{23}a_{32}-a_{12}a_{21}a_{33}\\ &=(-1)^{1+1}a_{11}\left|\begin{matrix}a_{22}&a_{23}\\a_{32}&a_{33}\end{matrix}\right| + (-1)^{1+2}a_{12}\left|\begin{matrix}a_{21}&a_{23}\\a_{31}&a_{33}\end{matrix}\right| + (-1)^{1+3}a_{13}\left|\begin{matrix}a_{21}&a_{22}\\a_{31}&a_{32}\end{matrix}\right| \end{aligned} det(A)=∣∣∣∣∣∣a11a21a31a12a22a32a13a23a33∣∣∣∣∣∣=a11a22a33+a12a23a31+a13a21a32−a13a22a31−a11a23a32−a12a21a33=(−1)1+1a11∣∣∣∣a22a32a23a33∣∣∣∣+(−1)1+2a12∣∣∣∣a21a31a23a33∣∣∣∣+(−1)1+3a13∣∣∣∣a21a31a22a32∣∣∣∣
则该方法总结为:
∣ A ∣ = a i 1 A i 1 + a i 2 A i 2 + a i 3 A i 3 + ⋯ + a i n A i n , i = 1 , 2 , 3 , … , n |A| = a_{i1}A_{i1} + a_{i2}A_{i2}+ a_{i3}A_{i3} + \dots + a_{in}A_{in}, i = 1,2,3, \dots , n ∣A∣=ai1Ai1+ai2Ai2+ai3Ai3+⋯+ainAin,i=1,2,3,…,n
∣ A ∣ = a 1 j A 1 j + a 2 j A 2 j + a 3 j A 3 j + ⋯ + a j n A j n , i = 1 , 2 , 3 , … , n |A| = a_{1j}A_{1j} + a_{2j}A_{2j}+ a_{3j}A_{3j} + \dots + a_{jn}A_{jn}, i = 1,2,3, \dots , n ∣A∣=a1jA1j+a2jA2j+a3jA3j+⋯+ajnAjn,i=1,2,3,…,n
其中 A i n A_{in} Ain为元素 a i n a_{in} ain的代数余子式
方法3 三角形行列式
根据行列式的性质,将原矩阵转换为三角矩阵,然后计算对角线上元素的乘积,即为该矩阵行列式的值
4.2 行列式的性质
- ∣ A ∣ = ∣ A T ∣ |A| = |A^T| ∣A∣=∣AT∣
- ∣ k A ∣ = k n ∣ A ∣ |kA| = k^n|A| ∣kA∣=kn∣A∣
- ∣ A B ∣ = ∣ A ∣ ∣ B ∣ |AB| = |A||B| ∣AB∣=∣A∣∣B∣
推论: ∣ A k ∣ = ∣ A ∣ k |A^k| = |A|^k ∣Ak∣=∣A∣k - 互换行列式的两行(列),行列式变号
推论:若行列式中某两行(列)的对应元素相等,则该行列式的值为零 - 用数 k k k去乘以行列式中某一行(列)的所有元素,等于乘以该行列式
推论:若行列式中有两行(列)对应元素成比例,则此行列式为零
推论:行列式中某一行(列)元素与另一行(列)对应元素的代数余子式的乘积之和为零 - 若行列式中某一行(列)的所有元素都是两个数的和,则此行列式可以写成两个行列式的和。
推论:在行列式某一行(列)元素上加上另一行(列)对元素的 k k k倍,行列式的值不变
4.3 什么是奇异矩阵?
定义 4.1 若方阵 A A A的行列式 ∣ A ∣ ≠ 0 |A| \neq 0 ∣A∤=0,称 A A A为非奇异矩阵;若方阵 A A A的行列式 ∣ A ∣ = 0 |A| = 0 ∣A∣=0,称 A A A为奇异矩阵。
4.4 什么是伴随矩阵?
定义 4.2 设方阵 A = ( a i j ) n × n A = (a_{ij})_{n \times n} A=(aij)n×n,行列式 ∣ A ∣ |A| ∣A∣的各个元素的代数余子式 A i j A_{ij} Aij(代数余子式不是一个矩阵,而是相应的行列式)所构成的矩阵称为矩阵 A A A的伴随矩阵,记作 A ∗ A^* A∗。
A ∗ = [ A 11 A 12 ⋯ A 1 n A 21 A 22 ⋯ A 2 n ⋮ ⋮ ⋱ A 11 A 12 ⋯ A 1 n ] A^*= \left [ \begin{matrix} A_{11}&A_{12} &\cdots& A_{1n}\\ A_{21}&A_{22} &\cdots& A_{2n}\\ \vdots&\vdots &\ddots& \\ A_{11}&A_{12} &\cdots& A_{1n}\\ \end{matrix} \right ] A∗=⎣⎢⎢⎢⎡A11A21⋮A11A12A22⋮A12⋯⋯⋱⋯A1nA2nA1n⎦⎥⎥⎥⎤
对于伴随矩阵,有 A A ∗ = A ∗ A = ∣ A ∣ E AA^* = A^*A = |A|E AA∗=A∗A=∣A∣E,其中 E E E为单位矩阵。
4.5 行列式的应用(克莱姆法则)
使用行列式,我们可以求解 n n n元一次方程组。
对于下列 n n n元一次方程组:
{ a 11 x 1 + a 12 x 2 + ⋯ + a 1 n x n = b 1 , a 21 x 1 + a 22 x 2 + ⋯ + a 2 n x n = b 2 , ⋯ a n 1 x 1 + a n 2 x 2 + ⋯ + a n n x n = b n , \begin{cases} a_{11}x_{1}+ a_{12}x_{2}+ \cdots +a_{1n}x_{n} = b_1,\\ a_{21}x_{1}+ a_{22}x_{2}+ \cdots +a_{2n}x_{n} = b_2,\\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \cdots \\ a_{n1}x_{1}+ a_{n2}x_{2}+ \cdots +a_{nn}x_{n} = b_n, \end{cases} ⎩⎪⎪⎪⎨⎪⎪⎪⎧a11x1+a12x2+⋯+a1nxn=b1,a21x1+a22x2+⋯+a2nxn=b2, ⋯an1x1+an2x2+⋯+annxn=bn,
其中 b 1 , b 2 , ⋯ , b n b_1,b_2,\cdots,b_n b1,b2,⋯,bn我们称之为线性方程组的常数项。
方程组的系数行列式为:
D = ∣ a 11 a 12 ⋯ a 1 n a 21 a 22 ⋯ a 2 n ⋮ ⋮ ⋱ ⋮ a 31 a 32 ⋯ a 3 n ∣ D= \left | \begin{matrix} a_{11} & a_{12} &\cdots& a_{1n}\\ a_{21} & a_{22} & \cdots& a_{2n}\\ \vdots&\vdots&\ddots&\vdots\\ a_{31} & a_{32} & \cdots& a_{3n} \end{matrix} \right | D=∣∣∣∣∣∣∣∣∣a11a21⋮a31a12a22⋮a32⋯⋯⋱⋯a1na2n⋮a3n∣∣∣∣∣∣∣∣∣
克莱姆法则为若 n n n元一次方程组的系数行列式 D ≠ 0 D \neq 0 D̸=0(非奇异矩阵),则方程组一定有解,而且解是唯一的:
x j = D j D , j = 1 , 2 , ⋯ , n x_j = \frac{D_j}{D}, j = 1,2,\cdots,n xj=DDj,j=1,2,⋯,n
其中, D j D_j Dj是将 D D D中的第 j j j列换成方程组的常数项而得到的行列式。
D j = ∣ a 11 ⋯ a 1 , j − 1 b 1 a 1 , j + 1 ⋯ a 1 n a 21 ⋯ a 2 , j − 1 b 2 a 2 , j + 1 ⋯ a 2 n ⋮ ⋮ ⋮ ⋮ ⋮ ⋱ ⋮ a n 1 ⋯ a n , j − 1 b n a n , j + 1 ⋯ a n n ∣ D_j= \left | \begin{matrix} a_{11} &\cdots &a_{1,j-1} &b_1&a_{1,j+1}&\cdots& a_{1n}\\ a_{21} &\cdots &a_{2,j-1} &b_2&a_{2,j+1}&\cdots& a_{2n}\\ \vdots&\vdots&\vdots&\vdots&\vdots&\ddots&\vdots\\ a_{n1} &\cdots &a_{n,j-1} &b_n&a_{n,j+1}&\cdots& a_{nn}\\ \end{matrix} \right | Dj=∣∣∣∣∣∣∣∣∣a11a21⋮an1⋯⋯⋮⋯a1,j−1a2,j−1⋮an,j−1b1b2⋮bna1,j+1a2,j+1⋮an,j+1⋯⋯⋱⋯a1na2n⋮ann∣∣∣∣∣∣∣∣∣
克莱姆法则适用的方程组有:1)方程的个数等于未知量个数(系数矩阵为方阵)2)系数行列式不等于零(等于零时方程组有多个解,不满足克莱姆法则)
4.6 什么是 n n n元齐次线性方程组?
若 n n n元一次方程组的常数项均为0,那么方程组为n元齐次线性方程组
{ a 11 x 1 + a 12 x 2 + ⋯ + a 1 n x n = 0 , a 21 x 1 + a 22 x 2 + ⋯ + a 2 n x n = 0 , ⋯ a n 1 x 1 + a n 2 x 2 + ⋯ + a n n x n = 0 , \begin{cases} a_{11}x_{1}+ a_{12}x_{2}+ \cdots +a_{1n}x_{n} = 0,\\ a_{21}x_{1}+ a_{22}x_{2}+ \cdots +a_{2n}x_{n} = 0,\\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \cdots \\ a_{n1}x_{1}+ a_{n2}x_{2}+ \cdots +a_{nn}x_{n} = 0, \end{cases} ⎩⎪⎪⎪⎨⎪⎪⎪⎧a11x1+a12x2+⋯+a1nxn=0,a21x1+a22x2+⋯+a2nxn=0, ⋯an1x1+an2x2+⋯+annxn=0,
根据方程组我们能看到, x 1 = x 2 = x 3 = ⋯ = x n = 0 x_1=x_2=x_3=\cdots = x_n=0 x1=x2=x3=⋯=xn=0是方程组的一个解。那么,当与克莱姆法则相结合时,我们能得到一下结论:
- 若齐次线性方程组的系数行列式 D ≠ 0 D\neq 0 D̸=0时,则它仅有零解
- 若齐次线性方程组有非零解,则它的系数行列式 D = 0 D=0 D=0
4.7 行列式的几何意义
二维向量组的行列式为两个向量 X , X ′ X,X' X,X′形成的平行四边形的面积。
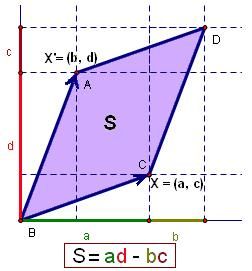
X = ( a , c ) , X ′ = ( b , d ) X=(a,c),X'=(b,d) X=(a,c),X′=(b,d)
S = ( a + b ) ( c + d ) − 2 b c − a c − b d = a d − b c = ∣ a b c d ∣ S = (a+b)(c+d)-2bc-ac-bd=ad-bc=\left |\begin{matrix}a&b\\c&d\end{matrix}\right| S=(a+b)(c+d)−2bc−ac−bd=ad−bc=∣∣∣∣acbd∣∣∣∣
同样的,三维向量组的行列式为三向量形成的平行六面体的体积。
行列式意义的清晰解释
矩阵的行列式是用该矩阵进行线性变换的伸缩因子。
先来看什么是线性变换

扩展到多维的情况下,我们有一个矩阵 A m × n A_{m\times n} Am×n,代表着在 m m m维空间中的 n n n个点的集合。我们要对该矩阵进行线性变换,也就是对该矩阵中的各个点进行线性变化,则我们有变换矩阵 T m × m T_{m\times m} Tm×m。
为了示例,我们假设:
A m × n = [ a d b e c f ] = [ a [ 1 0 0 ] + b [ 0 1 0 ] + c [ 0 0 1 ] d [ 1 0 0 ] + e [ 0 1 0 ] + f [ 0 0 1 ] ] A_{m\times n}= \left [\begin{matrix} a&d\\ b&e\\ c&f \end{matrix}\right]= \left[\begin{matrix} a\left[\begin{matrix} 1\\0\\0 \end{matrix}\right]+ b\left[\begin{matrix} 0\\1\\0 \end{matrix}\right]+ c\left[\begin{matrix} 0\\0\\1 \end{matrix}\right] \ \ \ d\left[\begin{matrix} 1\\0\\0 \end{matrix}\right]+ e\left[\begin{matrix} 0\\1\\0 \end{matrix}\right]+ f\left[\begin{matrix} 0\\0\\1 \end{matrix}\right] \end{matrix}\right] Am×n=⎣⎡abcdef⎦⎤=⎣⎡a⎣⎡100⎦⎤+b⎣⎡010⎦⎤+c⎣⎡001⎦⎤ d⎣⎡100⎦⎤+e⎣⎡010⎦⎤+f⎣⎡001⎦⎤⎦⎤
其中 i ⃗ = [ 1 0 0 ] , j ⃗ = [ 0 1 0 ] , z ⃗ = [ 0 0 1 ] \vec{i}=\left[\begin{matrix} 1\\0\\0 \end{matrix}\right], \vec{j}=\left[\begin{matrix} 0\\1\\0 \end{matrix}\right], \vec{z}=\left[\begin{matrix} 0\\0\\1 \end{matrix}\right] i=⎣⎡100⎦⎤,j=⎣⎡010⎦⎤,z=⎣⎡001⎦⎤是初始的基向量(对应三维坐标系中的三个轴上的单位向量),
[ a b c ] , [ d e f ] \left[\begin{matrix} a\\b\\c \end{matrix}\right],\left[\begin{matrix} d\\e\\f \end{matrix}\right] ⎣⎡abc⎦⎤,⎣⎡def⎦⎤是在三维坐标系中的两个点。
T m × m = [ 1 2 3 4 5 6 7 8 9 ] T_{m\times m}= \left [\begin{matrix} 1&2&3\\ 4&5&6\\ 7&8&9 \end{matrix}\right] Tm×m=⎣⎡147258369⎦⎤
则
T m × m A m × n = [ 1 a + 2 b + 3 c 1 d + 2 e + 3 f 4 a + 5 b + 6 c 4 d + 5 e + 6 f 7 a + 8 b + 9 c 7 d + 8 e + 9 f ] = [ a [ 1 4 7 ] + b [ 2 5 8 ] + c [ 3 6 9 ] d [ 1 4 7 ] + e [ 2 5 8 ] + f [ 3 6 9 ] ] T_{m\times m}A_{m\times n}= \left [\begin{matrix} 1a+2b+3c&1d+2e+3f\\ 4a+5b+6c&4d+5e+6f\\ 7a+8b+9c&7d+8e+9f \end{matrix}\right]= \left[\begin{matrix} a\left[\begin{matrix} 1\\4\\7 \end{matrix}\right]+ b\left[\begin{matrix} 2\\5\\8 \end{matrix}\right]+ c\left[\begin{matrix} 3\\6\\9 \end{matrix}\right] \ \ \ d\left[\begin{matrix} 1\\4\\7 \end{matrix}\right]+ e\left[\begin{matrix} 2\\5\\8 \end{matrix}\right]+ f\left[\begin{matrix} 3\\6\\9 \end{matrix}\right] \end{matrix}\right] Tm×mAm×n=⎣⎡1a+2b+3c4a+5b+6c7a+8b+9c1d+2e+3f4d+5e+6f7d+8e+9f⎦⎤=⎣⎡a⎣⎡147⎦⎤+b⎣⎡258⎦⎤+c⎣⎡369⎦⎤ d⎣⎡147⎦⎤+e⎣⎡258⎦⎤+f⎣⎡369⎦⎤⎦⎤
则对于线性变换后的矩阵,我们有:
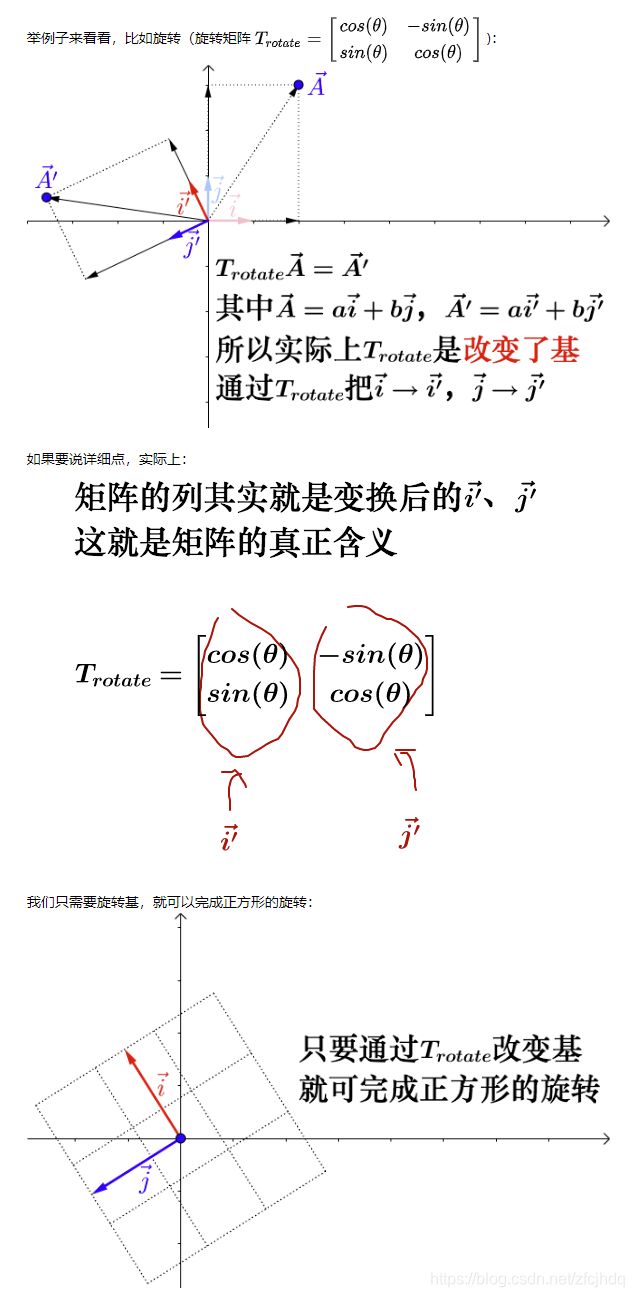
i ′ ⃗ = [ 1 4 7 ] , j ′ ⃗ = [ 2 5 8 ] , z ′ ⃗ = [ 3 6 9 ] \vec{i'}=\left[\begin{matrix} 1\\4\\7 \end{matrix}\right], \vec{j'}=\left[\begin{matrix} 2\\5\\8 \end{matrix}\right], \vec{z'}=\left[\begin{matrix} 3\\6\\9 \end{matrix}\right] i′=⎣⎡147⎦⎤,j′=⎣⎡258⎦⎤,z′=⎣⎡369⎦⎤为新的基向量。所以说线性变换改变了原始矩阵的基向量,而变换矩阵中的每一列,其实就是变换后的新的基向量。
在了解了矩阵的线性变换后,再看矩阵的行列式。对于变换矩阵,其行列式的含义就是如上所述的矩阵的行列式是用该矩阵进行线性变换的伸缩因子。
- 当行列式大于1,对图形体积有放大作用
- 当行列式等于1,图形体积不放大和缩小
- 当行列式大于0小于1,对图形体积有缩小作用
- 当行列式等于0,将使得图形在其所在的 n n n维空间的体积降为0。但是该变换后的图形在低于 n n n为的空间里体积不一定为0。(我靠,三体里面的超强的二向箔,降维打击有木有?)。由于通过该变换矩阵使得原矩阵体积降为0,因此没有另一个变换矩阵能使得降维后的矩阵恢复成原矩阵,因此该变换矩阵没有逆矩阵。
- 当行列式小于0,改变基向量的方向
4. 矩阵的秩
4.1 矩阵秩的定义
定义 4.1 在一个 m × n m \times n m×n的矩阵 A A A中,任取 k k k行 k k k列 ( k ≤ m i n { m , n } ) (k \leq min\{m,n\}) (k≤min{m,n}),位于这些行列相交处的元素按原来的次序所构成的 k k k阶行列式,称为矩阵 A A A的 k k k阶子式。
定义 4.2 矩阵 A m × n A_{m\times n} Am×n中所有不等于零的子式的最高阶数称为矩阵 A A A的秩,记为 r ( A ) r(A) r(A)。
性质 4.1
- r ( A m × n ) ≤ m i n { m , n } r(A_{m\times n}) \leq min\{m,n\} r(Am×n)≤min{m,n}
- r ( A T ) = r ( A ) r(A^T)=r(A) r(AT)=r(A)
- 若有一个 r r r阶子式不为0,则 r ( A ) ≥ r r(A) \geq r r(A)≥r;若有一个 r r r阶子式为0,则 r ( A ) ≤ r r(A) \leq r r(A)≤r
4.2 矩阵秩的计算
利用初等变换,将矩阵 A A A转换为行阶梯形矩阵,则矩阵中非0行的个数为该矩阵的秩。
(矩阵 A A A通过有限次初等变换,得到矩阵 B B B,则称 A A A与 B B B是等价的。每个矩阵,都能通过初等变换,转换为其对应的标准形)
4.3 满秩矩阵
- 对于矩阵 A m × n A_{m\times n} Am×n,其 r ( A ) = m r(A) = m r(A)=m,则称矩阵 A A A为行满秩矩阵。
- 对于矩阵 A m × n A_{m\times n} Am×n,其 r ( A ) = n r(A) = n r(A)=n,则称矩阵 A A A为列满秩矩阵。
- 对于矩阵 A n × n A_{n\times n} An×n,其 r ( A ) = n r(A) = n r(A)=n,则称矩阵 A A A为满秩矩阵(可逆矩阵、非奇异矩阵)。
- 对于矩阵 A n × n A_{n\times n} An×n,其 r ( A ) ≤ n r(A) \leq n r(A)≤n,则称矩阵 A A A为降秩矩阵(不可逆矩阵、奇异矩阵)。
对于 n n n阶方阵 A A A,下面的表述等价:
- A A A是 n n n阶满秩矩阵
- A A A等价于 E n E_n En(标准形为单位阵)
- ∣ A ∣ ≠ 0 |A| \neq 0 ∣A∤=0
- A A A是非奇异矩阵
5. 逆矩阵
5.1 什么是逆矩阵?
定义 5.1 设 A A A为 n n n阶方阵,若存在一个 n n n阶方阵 B B B,使得
A B = B A = E AB=BA=E AB=BA=E
则称 A A A是可逆矩阵, B B B称为 A A A的逆矩阵。
定理 5.1 n n n阶方阵 A A A可逆的充要条件为 A A A是非奇异矩阵,即 ( ∣ A ∣ ≠ 0 ) (|A|\neq0) (∣A∤=0)
则有
A − 1 = 1 ∣ A ∣ A ∗ A^{-1} = \frac{1}{|A|}A^* A−1=∣A∣1A∗
其中 A ∗ A^* A∗是方阵 A A A的伴随矩阵。
对于 n n n阶方阵 A A A,下面的表述等价:
- A A A是 n n n阶满秩矩阵
- A A A等价于 E n E_n En(标准形为单位阵)
- ∣ A ∣ ≠ 0 |A| \neq 0 ∣A∤=0
- A A A是非奇异矩阵
- A A A可逆
- A A A可以表示成一组初等矩阵的乘积
5.2 逆矩阵的性质
- 若 A A A可逆,则 ∣ A − 1 ∣ = ∣ A ∣ − 1 = 1 ∣ A ∣ |A^{-1}|=|A|^{-1}=\frac{1}{|A|} ∣A−1∣=∣A∣−1=∣A∣1
- 若 A A A可逆,则 A − 1 A^{-1} A−1也可逆且 ( A − 1 ) − 1 = A (A^{-1})^{-1}=A (A−1)−1=A
- ( A T ) − 1 = ( A − 1 ) T (A^T)^{-1}=(A^{-1})^T (AT)−1=(A−1)T
- 若 A , B A,B A,B为同阶可逆阵,则 A B AB AB也可逆且 ( A B ) − 1 = B − 1 A − 1 (AB)^{-1}=B^{-1}A^{-1} (AB)−1=B−1A−1;扩展到多维 ( A B C ) − 1 = C − 1 B − 1 A − 1 (ABC)^{-1}=C^{-1}B^{-1}A^{-1} (ABC)−1=C−1B−1A−1
- 若 A A A可逆且 k ≠ 0 k\neq 0 k̸=0,则 k A kA kA也可逆且 ( k A ) − 1 = 1 k A − 1 (kA)^{-1}=\frac{1}{k}A^{-1} (kA)−1=k1A−1