Halcon亚像素边缘缺陷检测案例
一、下面的案例是总结的Halcon边缘缺陷检测的一种情况。本案例是利用阈值分割获取金属区域,并利用boundary和edges_sub_pix获取到亚像素边缘。然后综合利用fit_rectangle2_contour_xld拟合出金属对应的放射矩形,最后利用dist_rectangle2_contour_points_xld计算金属轮廓上面的点到最小外接矩轮廓上面的点距离判断有无缺陷。触类旁通,依据此案例的原理可以推理应用在别的区域。例如胶路轨迹检测,仍然可以利用边缘XLD轮廓和边缘点距离判断胶路有无,断胶,溢胶,等等。
二、由于金属顶点角落附近打光比较暗,容易误检,所以需要屏蔽角点附近区域。案例计算金属轮廓上的点到最小外接矩的四个顶点距离,并获取最小值。后面判断缺陷时会屏蔽距离小于7的点,其实就是屏蔽了矩形顶点附近七个像素以内的所有像素点。屏蔽代码如下:
2.1 计算轮廓上所有点到最小外接矩4个顶点距离。
D1 := sqrt((Rows - RowC[0]) * (Rows - RowC[0]) + (Cols - ColC[0]) * (Cols - ColC[0]))
D2 := sqrt((Rows - RowC[1]) * (Rows - RowC[1]) + (Cols - ColC[1]) * (Cols - ColC[1]))
D3 := sqrt((Rows - RowC[2]) * (Rows - RowC[2]) + (Cols - ColC[2]) * (Cols - ColC[2]))
D4 := sqrt((Rows - RowC[3]) * (Rows - RowC[3]) + (Cols - ColC[3]) * (Cols - ColC[3]))
2.2 通过min2比较所有的数组,并返回最小值数组。
DistCorner := min2(min2(D1,D2),min2(D3,D4))
2.3 计算金属轮廓上面的点到最小外接矩轮廓上面的点距离
dist_rectangle2_contour_points_xld (RectangleEdge, 0, Row[I], Column[I], Phi[I], Length1[I], Length2[I], Dist)
2.4 通过if (DistCorner[J] > 7.0 and Dist[J] > 1.0),屏蔽矩形顶点附近七个像素以内的所有像素点,并且金属轮廓上面的点到最小外接矩轮廓上面的点距离大于1的判定NG。
-
RectangleOK := true -
for J := 0 to |Dist| - 1 by 1 -
if (DistCorner[J] > 7.0 and Dist[J] > 1.0) -
RectangleOK := false -
break -
endif -
endfor
* This example program shows how fit_rectangle2_contour_xld can be used to
* detect manufacturing errors of punched holes in a metal part. The errors
* show up as small protrusions of the metal into the hole. They can be detected
* by fitting rectangles to the edges of the hole robustly (i.e., with outlier
* suppression) and the calculating the distances of the edges to the rectangle
* sides using dist_rectangle2_contour_points_xld. Since the corners of the
* holes are slightly rounded, some extra processing must be performed to
* disregard the corners in the check for errors.
dev_update_off ()
read_image (Image, 'punched_holes')
get_image_size (Image, Width, Height)
dev_close_window ()
dev_open_window (0, 0, Width, Height, 'black', WindowHandle)
set_display_font (WindowHandle, 16, 'mono', 'true', 'false')
dev_display (Image)
* Since the metal part is backlit, the processing speed can be increased
* significantly by constructing a ROI for the subpixel-precise edge extraction
* that is as small as possible. This can easily be achieved by thresholding and
* morphology.
fast_threshold (Image, Region, 128, 255, 10)
boundary (Region, Border, 'inner')
dilation_rectangle1 (Border, EdgeROI, 7, 7)
reduce_domain (Image, EdgeROI, ImageReduced)
* Perform the edge extraction.
edges_sub_pix (ImageReduced, Edges, 'canny', 1.7, 40, 120)
* Remove edge fragments that are too short.
select_shape_xld (Edges, RectangleEdges, 'contlength', 'and', 500, 100000)
* Fit rectangles to the holes' edges using the outlier suppression of Tukey.
fit_rectangle2_contour_xld (RectangleEdges, 'tukey', -1, 0, 0, 3, 2, Row, Column, Phi, Length1, Length2, PointOrder)
* Create rectangles with the fitted parameters for visualization purposes.
gen_rectangle2_contour_xld (Rectangles, Row, Column, Phi, Length1, Length2)
dev_set_color ('yellow')
dev_display (Rectangles)
* Check whether the holes are OK.
count_obj (RectangleEdges, Number)
for I := 0 to Number - 1 by 1
select_obj (RectangleEdges, RectangleEdge, I + 1)
* Get the contour's coordinates.
get_contour_xld (RectangleEdge, Rows, Cols)
* Create a rectangle with the appropriate rectangle parameters.
gen_rectangle2_contour_xld (Rect, Row[I], Column[I], Phi[I], Length1[I], Length2[I])
* Get the coordinates of the rectangle's corners.
get_contour_xld (Rect, RowC, ColC)
* Calculate the distances of all the contour points to the four corners of the
* rectangle.
D1 := sqrt((Rows - RowC[0]) * (Rows - RowC[0]) + (Cols - ColC[0]) * (Cols - ColC[0]))
D2 := sqrt((Rows - RowC[1]) * (Rows - RowC[1]) + (Cols - ColC[1]) * (Cols - ColC[1]))
D3 := sqrt((Rows - RowC[2]) * (Rows - RowC[2]) + (Cols - ColC[2]) * (Cols - ColC[2]))
D4 := sqrt((Rows - RowC[3]) * (Rows - RowC[3]) + (Cols - ColC[3]) * (Cols - ColC[3]))
* The distance of the contour points to the corners of the rectangle is given
* by the minimum of the four distances. This distance is used to exclude
* contour points that are too close to the corners from the check for errors.
DistCorner := min2(min2(D1,D2),min2(D3,D4))
* Calculate the distances of the contour points of the rectangle.
dist_rectangle2_contour_points_xld (RectangleEdge, 0, Row[I], Column[I], Phi[I], Length1[I], Length2[I], Dist)
* Check whether the hole is OK by examining the distances of the contour
* points to the rectangle. A hole is OK if all points that lie more than seven
* pixels from the corners have a distance of less than one pixel to the fitted
* rectangle. To do so, we could use the following code:
* RectangleOK := true
* for J := 0 to |Dist| - 1 by 1
* if (DistCorner[J] > 7.0 and Dist[J] > 1.0)
* RectangleOK := false
* break
* endif
* endfor
* A much faster way to do this in HDevelop is to generate a mask that
* contains 0 for all points that should not be taken into account and 1
* otherwise. To do so, we subtract the minimum distance of 7.0 from the
* distances to the corners and take the maximum of 0.0 and the resulting
* values. This sets all the distances that are too close to the corners to 0.
* To set all other values to 1, we can simply take the sign of the values.
Mask := sgn(max2(DistCorner - 7.0,0.0))
* We can now multiply the distances to the rectangle with the mask and
* check whether the maximum distance is smaller than the maximum allowed
* distance of 1.0.
RectangleOK := max(Dist * Mask) <= 1.0
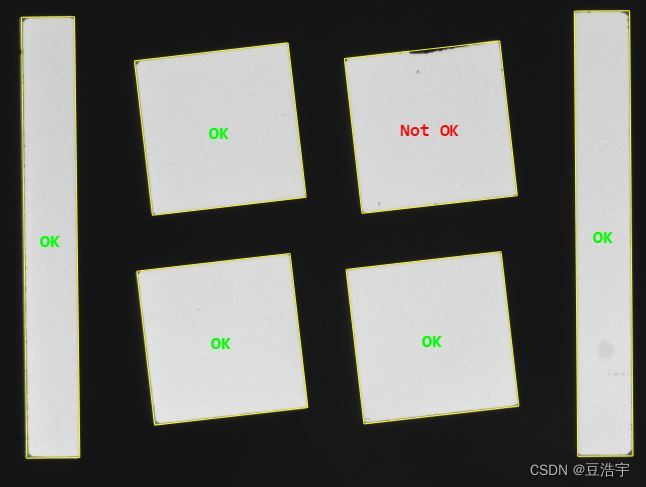
* Display whether the hole is OK.
if (RectangleOK)
dev_set_color ('green')
get_string_extents (WindowHandle, 'OK', Ascent, Descent, Width, Height)
set_tposition (WindowHandle, Row[I] - Height / 2, Column[I] - Width / 2)
write_string (WindowHandle, 'OK')
else
dev_set_color ('red')
get_string_extents (WindowHandle, 'Not OK', Ascent, Descent, Width, Height)
set_tposition (WindowHandle, Row[I] - Height / 2, Column[I] - Width / 2)
write_string (WindowHandle, 'Not OK')
endif
endfor
原图

结果图