视觉SLAM14讲笔记05:ch7三角测量,PnP,ICP
三角测量
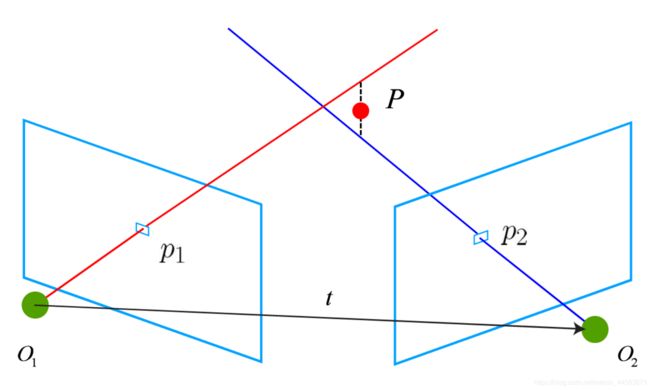
考虑图像 I 1 I_{1} I1 和 I 2 , I_{2}, I2, 以左图为参考,右图的变换矩阵为 T T T 。相机光心为 O 1 O_{1} O1 和 $O_{2} 。 在 。 在 。在I_{1}$ 中有特征点 p 1 , p_{1}, p1, 对应 I 2 I_{2} I2 中有特征点 p 2 p_{2} p2 。理论上直线 O 1 p 1 O_{1} p_{1} O1p1 与 O 2 p 2 O_{2} p_{2} O2p2 在 场景中会相交于一点 P,该点即是两个特征点所对应的地图点在三维场景中的位置。然而由于噪声的影响,这两条直线往往无法相交。因此,可以通过最二小乘去求解。
设 x 1 , x 2 x _{1}, x _{2} x1,x2 为两个特征点的归一化坐标,那么它们满足:
s 1 x 1 = s 2 R x 2 + t s_{1} x _{1}=s_{2} R x _{2}+ t s1x1=s2Rx2+t
比方说先来看 $s_{2} $。如果我要算 s 2 , s_{2}, s2, 那么先对上式两侧左乘一个 x 1 ∧ , x _{1}^{\wedge}, x1∧, 得:
0 = s 2 x 1 ∧ R x 2 + x 1 ∧ t 0=s_{2} x _{1}^{\wedge} R x _{2}+ x _{1}^{\wedge} t 0=s2x1∧Rx2+x1∧t
可看成 s 2 s_{2} s2 的一个方程,可以根据它直接求得 s 2 s_{2} s2。
3D-2D: PnP(Perspective-n-Point)
PnP是求解 3D 到 2D 点对运动的方法。它描述了当我们知道 n n n个3D空间点以及它们的投影位置时,如何估计相机所在的位姿。前面已经说了,2D-2D的对极几何方法需要8个或8个以上的点对(以八点法为例),且存在着初始化、纯旋转和尺度的问题。然而,如果两张图像中,其中一张特征点的3D位置已知,那么最少只需三个点对(需要至少一个额外点验证结果)就可以估计相机运动。
直接线性变
考虑某个空间点 P , P, P, 它的齐次坐标为 P = ( X , Y , Z , 1 ) T P =(X, Y, Z, 1)^{T} P=(X,Y,Z,1)T 。在图像 I 1 I_{1} I1 中,投影到特征 点 x 1 = ( u 1 , v 1 , 1 ) T x _{1}=\left(u_{1}, v_{1}, 1\right)^{T} x1=(u1,v1,1)T (以归一化平面齐次坐标表示)。此时相机的位姿 R , t R , t R,t 是未知的。与 单应矩阵的求解类似,我们定义增广矩阵 [ R ∣ t ] [R|t] [R∣t] 为一个 3 × 4 3 \times 4 3×4 的矩阵,包含了旋转与平移信息。我们把它的展开形式列写如下:
( u 1 v 1 1 ) = ( t 1 T t 2 T t 3 T ) ( X Y Z 1 ) \left(\begin{array}{c} u_{1} \\ v_{1} \\ 1 \end{array}\right) =\left(\begin{array}{c} \boldsymbol{t_1}^T \\ \boldsymbol{t_2}^T \\ \boldsymbol{t_3}^T \end{array}\right)\left(\begin{array}{c} X \\ Y \\ Z \\ 1 \end{array}\right) ⎝⎛u1v11⎠⎞=⎝⎛t1Tt2Tt3T⎠⎞⎝⎜⎜⎛XYZ1⎠⎟⎟⎞
t 1 , t 2 , t 3 \boldsymbol{t_1}, \boldsymbol{t_2}, \boldsymbol{t_3} t1,t2,t3为3个4维向量,则我们得到两个约束:
t 1 T P − t 3 T P u 1 = 0 t 2 T P − t 3 T P v 1 = 0 \begin{aligned} &t _{1}^{T} P - t _{3}^{T} P u_{1}=0\\ &t _{2}^{T} P - t _{3}^{T} P v_{1}=0 \end{aligned} t1TP−t3TPu1=0t2TP−t3TPv1=0
请注意 t t t 是待求的变量,可以看到每个特征点提供了两个关于 t t t 的线性约束。假设 共有 N 个特征点,可以列出线性方程组:
( P 1 T 0 − u 1 P 1 T 0 P 1 T − v 1 P 1 T ⋮ ⋮ ⋮ P N T 0 − u N P N T 0 P N T − v N P N T ) ( t 1 t 2 t 3 ) = 0 \left(\begin{array}{ccc} P _{1}^{T} & 0 & -u_{1} P _{1}^{T} \\ 0 & P _{1}^{T} & -v_{1} P _{1}^{T} \\ \vdots & \vdots & \vdots \\ P _{N}^{T} & 0 & -u_{N} P _{N}^{T} \\ 0 & P _{N}^{T} & -v_{N} P _{N}^{T} \end{array}\right)\left(\begin{array}{l} t _{1} \\ t _{2} \\ t _{3} \end{array}\right)=0 ⎝⎜⎜⎜⎜⎜⎛P1T0⋮PNT00P1T⋮0PNT−u1P1T−v1P1T⋮−uNPNT−vNPNT⎠⎟⎟⎟⎟⎟⎞⎝⎛t1t2t3⎠⎞=0
由于 t t t 一共有12维,因此最少通过六对匹配点,即可实现矩阵 T T T 的线性求解,这种方法称为直接线性变换(Direct Linear Transform, DLT)。
最小化重投影误差

除了使用线性方法之外,我们可以把PnP问题构建成一个定义于李代数上的非线性最小二乘问题。
假设某空间点坐标为 P i = [ X i , Y i , Z i ] T , P _{i}=\left[X_{i}, Y_{i}, Z_{i}\right]^{T}, Pi=[Xi,Yi,Zi]T, 其投影的像素坐标为 u i = [ u i , v i ] T u _{i}=\left[u_{i}, v_{i}\right]^{T} ui=[ui,vi]T。我们定义增广矩阵 T = [ R ∣ t ] T=[R|t] T=[R∣t] 为一个 3 × 4 3 \times 4 3×4 的矩阵,它的李代数表示为 ξ \xi ξ,包含了旋转与平移。
s i u i = K ( T P i ) [ 1 : 3 ] , T = [ R t 0 T 1 ] = exp ( ξ ∧ ) s_{i} u _{i}= K (T P _{i})_{[1:3]},\\ T=\left[\begin{array}{ll} R & t \\ 0^{T} & 1 \end{array}\right] =\exp \left( \xi ^{\wedge}\right) siui=K(TPi)[1:3],T=[R0Tt1]=exp(ξ∧)
隐含着的齐次坐标到非齐次的转换,否则按矩阵的乘法来说,维度是不对的。 T P i T P_{i} TPi 结果是 4 × 1 4 \times 1 4×1 的,而它左侧的 K K K 是 3 × 3 3 \times 3 3×3 的,所以必责把 T P i T P _{i} TPi 的前三维取出来,变成三维的非齐次坐标。或者:
s i [ u i v i 1 ] = K [ R ∣ t ] 3 × 4 [ X i Y i Z i 1 ] s_{i}\left[\begin{array}{c} u_{i} \\ v_{i} \\ 1 \end{array}\right]= K [R|t]_{3\times 4}\left[\begin{array}{c} X_{i} \\ Y_{i} \\ Z_{i} \\ 1 \end{array}\right] si⎣⎡uivi1⎦⎤=K[R∣t]3×4⎣⎢⎢⎡XiYiZi1⎦⎥⎥⎤
该问题的误差项,是将像素坐标(观测到的投影位置)与 3D点按照当前估计的位姿进行投影得到的位置相比较得到的误差,所以称之为重投影误差。构建最小二乘问题,然后寻找最好的相机位姿,使它最小化。
T ∗ = arg min ξ 1 2 ∑ i = 1 n ∥ u i − 1 s i K ( T P i ) [ 1 : 3 ] ∥ 2 2 T ^{*}=\arg \min _{ \xi } \frac{1}{2} \sum_{i=1}^{n}\left\| u _{i}-\frac{1}{s_{i}} K (T P _{i})_{[1:3]}\right\|_{2}^{2} T∗=argξmin21i=1∑n∥∥∥∥ui−si1K(TPi)[1:3]∥∥∥∥22
3D-3D: ICP(Iterative Closest Point)
假设我们有一组配对好的3D点:
P = { p 1 , … , p n } , P ′ = { p 1 ′ , … , p n ′ } P =\left\{ p _{1}, \ldots, p _{n}\right\}, \quad P ^{\prime}=\left\{ p _{1}^{\prime}, \ldots, p _{n}^{\prime}\right\} P={p1,…,pn},P′={p1′,…,pn′}
现在,想要找一个欧氏变换 R , t , R , t , R,t, 使得:
∀ i , p i = R p i ′ + t \forall i, p _{i}= R p _{i}^{\prime}+ t ∀i,pi=Rpi′+t
SVD 方法
根据前面描述的ICP问题,我们先定义第 i i i 对点的误差项:
e i = p i − ( R p i ′ + t ) e _{i}= p _{i}-\left( R p _{i}^{\prime}+ t \right) ei=pi−(Rpi′+t)
然后,构建最小二乘问题,求使误差平方和达到极小的 R , t : R, t: R,t:
min R , t J = 1 2 ∑ i = 1 n ∥ ( p i − ( R p i ′ + t ) ) ∥ 2 2 \min _{ R , t } J=\frac{1}{2} \sum_{i=1}^{n}\left\|\left( p _{i}-\left( R p _{i}^{\prime}+ t \right)\right)\right\|_{2}^{2} R,tminJ=21i=1∑n∥(pi−(Rpi′+t))∥22
非线性优化方法
求解ICP的另一种方式是使用非线性优化,以迭代的方式去找最优值。该方法和我们前面讲述的PnP非常相似。以李代数表达位姿时,目标函数可以写成:
min ξ = 1 2 ∑ i = 1 n ∥ ( p i − exp ( ξ ∧ ) p i ′ ) ∥ 2 2 \min _{\xi}=\frac{1}{2} \sum_{i=1}^{n}\left\|\left( p _{i}-\exp \left( \xi ^{\wedge}\right) p _{i}^{\prime}\right)\right\|_{2}^{2} ξmin=21i=1∑n∥(pi−exp(ξ∧)pi′)∥22
单个误差项关于位姿导数已经在前面推导过了,使用李代数扰动模型即可:
∂ e ∂ δ ξ = − ( exp ( ξ ∧ ) p i ′ ) ⊙ \frac{\partial e}{\partial \delta \xi}=-\left(\exp \left(\xi^{\wedge}\right) p_{i}^{\prime}\right)^{\odot} ∂δξ∂e=−(exp(ξ∧)pi′)⊙