深度强化学习算法(朴素DQN,DDQN,PPO,A3C等)比较与实现
不同算法的理论比较部分参考CSDN博客 - 专业IT技术发表平台,代码实现在python完成。用的算例是OpenAI官网gym提供的算例环境"CartPole-v1"游戏,代码实现部分在谷歌全家桶(Colab,tensorflow2,wandb)中完成
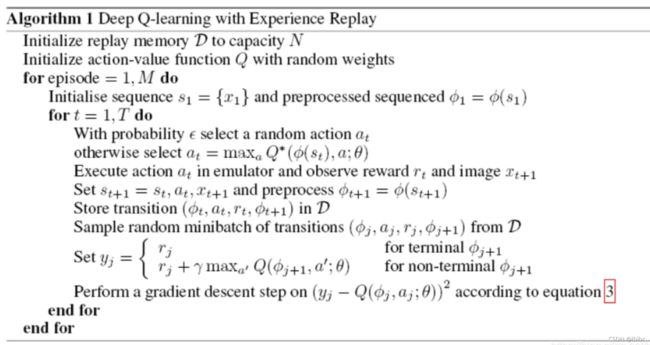
1.朴素DQN
原论文:
[DQN] Playing Atari with Deep Reinforcement Learning [1]
Off-policy,Discrete action space,model free,2015
算法:
python实现:
import wandb
import tensorflow as tf
from tensorflow.keras.layers import Input, Dense
from tensorflow.keras.optimizers import Adam
import gym
import argparse
import numpy as np
from collections import deque
import random
tf.keras.backend.set_floatx('float64')
wandb.init(name='DQN', project="deep-rl-tf2")
parser = argparse.ArgumentParser()
parser.add_argument('--gamma', type=float, default=0.95)
parser.add_argument('--lr', type=float, default=0.005)
parser.add_argument('--batch_size', type=int, default=32)
parser.add_argument('--eps', type=float, default=1.0)
parser.add_argument('--eps_decay', type=float, default=0.995)
parser.add_argument('--eps_min', type=float, default=0.01)
args = parser.parse_args()
# In[]
class ReplayBuffer:
def __init__(self, capacity=10000):
self.buffer = deque(maxlen=capacity)
def put(self, state, action, reward, next_state, done):
self.buffer.append([state, action, reward, next_state, done])
def sample(self):
sample = random.sample(self.buffer, args.batch_size)
states, actions, rewards, next_states, done = map(np.asarray, zip(*sample))
states = np.array(states).reshape(args.batch_size, -1)
next_states = np.array(next_states).reshape(args.batch_size, -1)
return states, actions, rewards, next_states, done
def size(self):
return len(self.buffer)
class ActionStateModel:
def __init__(self, state_dim, aciton_dim):
self.state_dim = state_dim
self.action_dim = aciton_dim
self.epsilon = args.eps
self.model = self.create_model()
def create_model(self):
model = tf.keras.Sequential([
Input((self.state_dim,)),
Dense(32, activation='relu'),
Dense(16, activation='relu'),
Dense(self.action_dim)
])
model.compile(loss='mse', optimizer=Adam(args.lr))
return model
def predict(self, state):
return self.model.predict(state)
def get_action(self, state):
state = np.reshape(state, [1, self.state_dim])
self.epsilon *= args.eps_decay
self.epsilon = max(self.epsilon, args.eps_min)
q_value = self.predict(state)[0]
if np.random.random() < self.epsilon:
return random.randint(0, self.action_dim-1)
return np.argmax(q_value)
def train(self, states, targets):
self.model.fit(states, targets, epochs=1, verbose=0)
class Agent:
def __init__(self, env):
self.env = env
self.state_dim = self.env.observation_space.shape[0]
self.action_dim = self.env.action_space.n
self.model = ActionStateModel(self.state_dim, self.action_dim)
self.target_model = ActionStateModel(self.state_dim, self.action_dim)
self.target_update()
self.buffer = ReplayBuffer()
def target_update(self):
weights = self.model.model.get_weights()
self.target_model.model.set_weights(weights)
def replay(self):
for _ in range(10):
states, actions, rewards, next_states, done = self.buffer.sample()
targets = self.target_model.predict(states)
next_q_values = self.target_model.predict(next_states).max(axis=1)
targets[range(args.batch_size), actions] = rewards + (1-done) * next_q_values * args.gamma
self.model.train(states, targets)
def train(self, max_episodes=10):
for ep in range(max_episodes):
done, total_reward = False, 0
state = self.env.reset()
while not done:
action = self.model.get_action(state)
next_state, reward, done, _ = self.env.step(action)
self.buffer.put(state, action, reward*0.01, next_state, done)
total_reward += reward
state = next_state
if self.buffer.size() >= args.batch_size:
self.replay()
self.target_update()
print('EP{} EpisodeReward={}'.format(ep, total_reward))
wandb.log({'Reward': total_reward})
# In[]
env = gym.make('CartPole-v1')
agent = Agent(env)
agent.train(max_episodes=100)
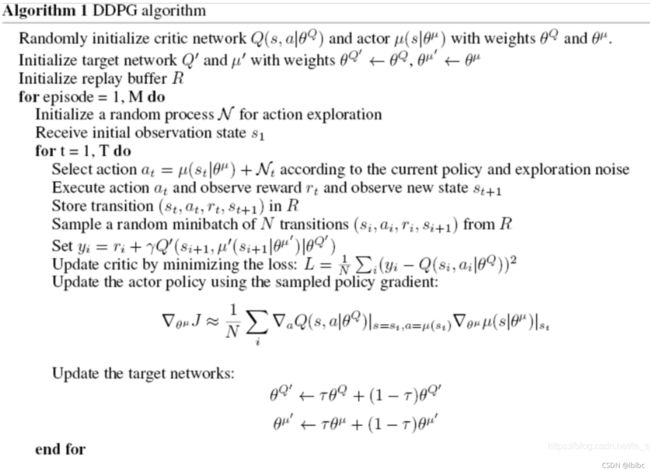
2.DDPG
原论文:
Continuous Control with Deep Reinforcement Learning[2]
Model free, off policy, continuous action, 2015
算法:
python实现:
import wandb
import tensorflow as tf
from tensorflow.keras.layers import Input, Dense, Flatten, Lambda
from tensorflow.keras.optimizers import Adam
import gym
import argparse
import numpy as np
from collections import deque
import random
tf.keras.backend.set_floatx('float64')
wandb.init(name='DoubleDQN', project="deep-rl-tf2")
parser = argparse.ArgumentParser()
parser.add_argument('--gamma', type=float, default=0.95)
parser.add_argument('--lr', type=float, default=0.005)
parser.add_argument('--batch_size', type=int, default=32)
parser.add_argument('--eps', type=float, default=1.0)
parser.add_argument('--eps_decay', type=float, default=0.995)
parser.add_argument('--eps_min', type=float, default=0.01)
args = parser.parse_args()
class ReplayBuffer:
def __init__(self, capacity=10000):
self.buffer = deque(maxlen=capacity)
def put(self, state, action, reward, next_state, done):
self.buffer.append([state, action, reward, next_state, done])
def sample(self):
sample = random.sample(self.buffer, args.batch_size)
states, actions, rewards, next_states, done = map(np.asarray, zip(*sample))
states = np.array(states).reshape(args.batch_size, -1)
next_states = np.array(next_states).reshape(args.batch_size, -1)
return states, actions, rewards, next_states, done
def size(self):
return len(self.buffer)
class ActionStateModel:
def __init__(self, state_dim, aciton_dim):
self.state_dim = state_dim
self.action_dim = aciton_dim
self.epsilon = args.eps
self.model = self.create_model()
def create_model(self):
model = tf.keras.Sequential([
Input((self.state_dim,)),
Dense(32, activation='relu'),
Dense(16, activation='relu'),
Dense(self.action_dim)
])
model.compile(loss='mse', optimizer=Adam(args.lr))
return model
def predict(self, state):
return self.model.predict(state)
def get_action(self, state):
state = np.reshape(state, [1, self.state_dim])
self.epsilon *= args.eps_decay
self.epsilon = max(self.epsilon, args.eps_min)
q_value = self.predict(state)[0]
if np.random.random() < self.epsilon:
return random.randint(0, self.action_dim-1)
return np.argmax(q_value)
def train(self, states, targets):
self.model.fit(states, targets, epochs=1, verbose=0)
class Agent:
def __init__(self, env):
self.env = env
self.state_dim = self.env.observation_space.shape[0]
self.action_dim = self.env.action_space.n
self.model = ActionStateModel(self.state_dim, self.action_dim)
self.target_model = ActionStateModel(self.state_dim, self.action_dim)
self.target_update()
self.buffer = ReplayBuffer()
def target_update(self):
weights = self.model.model.get_weights()
self.target_model.model.set_weights(weights)
def replay(self):
for _ in range(10):
states, actions, rewards, next_states, done = self.buffer.sample()
targets = self.target_model.predict(states)
next_q_values = self.target_model.predict(next_states)[range(args.batch_size),np.argmax(self.model.predict(next_states), axis=1)]
targets[range(args.batch_size), actions] = rewards + (1-done) * next_q_values * args.gamma
self.model.train(states, targets)
def train(self, max_episodes=1000):
for ep in range(max_episodes):
done, total_reward = False, 0
state = self.env.reset()
while not done:
action = self.model.get_action(state)
next_state, reward, done, _ = self.env.step(action)
self.buffer.put(state, action, reward*0.01, next_state, done)
total_reward += reward
state = next_state
if self.buffer.size() >= args.batch_size:
self.replay()
self.target_update()
print('EP{} EpisodeReward={}'.format(ep, total_reward))
wandb.log({'Reward': total_reward})
def main():
env = gym.make('CartPole-v1')
agent = Agent(env)
agent.train(max_episodes=1000)
if __name__ == "__main__":
main()
3.A3C
原论文:
Asynchronous Methods for Deep Reinforcement Learning[4]
算法:

python实现:
import wandb
import tensorflow as tf
from tensorflow.keras.layers import Input, Dense
import gym
import argparse
import numpy as np
from threading import Thread, Lock
from multiprocessing import cpu_count
tf.keras.backend.set_floatx('float64')
wandb.init(name='A3C', project="deep-rl-tf2")
parser = argparse.ArgumentParser()
parser.add_argument('--gamma', type=float, default=0.99)
parser.add_argument('--update_interval', type=int, default=5)
parser.add_argument('--actor_lr', type=float, default=0.0005)
parser.add_argument('--critic_lr', type=float, default=0.001)
args = parser.parse_args()
CUR_EPISODE = 0
class Actor:
def __init__(self, state_dim, action_dim):
self.state_dim = state_dim
self.action_dim = action_dim
self.model = self.create_model()
self.opt = tf.keras.optimizers.Adam(args.actor_lr)
self.entropy_beta = 0.01
def create_model(self):
return tf.keras.Sequential([
Input((self.state_dim,)),
Dense(32, activation='relu'),
Dense(16, activation='relu'),
Dense(self.action_dim, activation='softmax')
])
def compute_loss(self, actions, logits, advantages):
ce_loss = tf.keras.losses.SparseCategoricalCrossentropy(
from_logits=True)
entropy_loss = tf.keras.losses.CategoricalCrossentropy(
from_logits=True)
actions = tf.cast(actions, tf.int32)
policy_loss = ce_loss(
actions, logits, sample_weight=tf.stop_gradient(advantages))
entropy = entropy_loss(logits, logits)
return policy_loss - self.entropy_beta * entropy
def train(self, states, actions, advantages):
with tf.GradientTape() as tape:
logits = self.model(states, training=True)
loss = self.compute_loss(
actions, logits, advantages)
grads = tape.gradient(loss, self.model.trainable_variables)
self.opt.apply_gradients(zip(grads, self.model.trainable_variables))
return loss
class Critic:
def __init__(self, state_dim):
self.state_dim = state_dim
self.model = self.create_model()
self.opt = tf.keras.optimizers.Adam(args.critic_lr)
def create_model(self):
return tf.keras.Sequential([
Input((self.state_dim,)),
Dense(32, activation='relu'),
Dense(16, activation='relu'),
Dense(16, activation='relu'),
Dense(1, activation='linear')
])
def compute_loss(self, v_pred, td_targets):
mse = tf.keras.losses.MeanSquaredError()
return mse(td_targets, v_pred)
def train(self, states, td_targets):
with tf.GradientTape() as tape:
v_pred = self.model(states, training=True)
assert v_pred.shape == td_targets.shape
loss = self.compute_loss(v_pred, tf.stop_gradient(td_targets))
grads = tape.gradient(loss, self.model.trainable_variables)
self.opt.apply_gradients(zip(grads, self.model.trainable_variables))
return loss
class Agent:
def __init__(self, env_name):
env = gym.make(env_name)
self.env_name = env_name
self.state_dim = env.observation_space.shape[0]
self.action_dim = env.action_space.n
self.global_actor = Actor(self.state_dim, self.action_dim)
self.global_critic = Critic(self.state_dim)
self.num_workers = cpu_count()
def train(self, max_episodes=1000):
workers = []
for i in range(self.num_workers):
env = gym.make(self.env_name)
workers.append(WorkerAgent(
env, self.global_actor, self.global_critic, max_episodes))
for worker in workers:
worker.start()
for worker in workers:
worker.join()
class WorkerAgent(Thread):
def __init__(self, env, global_actor, global_critic, max_episodes):
Thread.__init__(self)
self.lock = Lock()
self.env = env
self.state_dim = self.env.observation_space.shape[0]
self.action_dim = self.env.action_space.n
self.max_episodes = max_episodes
self.global_actor = global_actor
self.global_critic = global_critic
self.actor = Actor(self.state_dim, self.action_dim)
self.critic = Critic(self.state_dim)
self.actor.model.set_weights(self.global_actor.model.get_weights())
self.critic.model.set_weights(self.global_critic.model.get_weights())
def n_step_td_target(self, rewards, next_v_value, done):
td_targets = np.zeros_like(rewards)
cumulative = 0
if not done:
cumulative = next_v_value
for k in reversed(range(0, len(rewards))):
cumulative = args.gamma * cumulative + rewards[k]
td_targets[k] = cumulative
return td_targets
def advatnage(self, td_targets, baselines):
return td_targets - baselines
def list_to_batch(self, list):
batch = list[0]
for elem in list[1:]:
batch = np.append(batch, elem, axis=0)
return batch
def train(self):
global CUR_EPISODE
while self.max_episodes >= CUR_EPISODE:
state_batch = []
action_batch = []
reward_batch = []
episode_reward, done = 0, False
state = self.env.reset()
while not done:
# self.env.render()
probs = self.actor.model.predict(
np.reshape(state, [1, self.state_dim]))
action = np.random.choice(self.action_dim, p=probs[0])
next_state, reward, done, _ = self.env.step(action)
state = np.reshape(state, [1, self.state_dim])
action = np.reshape(action, [1, 1])
next_state = np.reshape(next_state, [1, self.state_dim])
reward = np.reshape(reward, [1, 1])
state_batch.append(state)
action_batch.append(action)
reward_batch.append(reward)
if len(state_batch) >= args.update_interval or done:
states = self.list_to_batch(state_batch)
actions = self.list_to_batch(action_batch)
rewards = self.list_to_batch(reward_batch)
next_v_value = self.critic.model.predict(next_state)
td_targets = self.n_step_td_target(
rewards, next_v_value, done)
advantages = td_targets - self.critic.model.predict(states)
with self.lock:
actor_loss = self.global_actor.train(
states, actions, advantages)
critic_loss = self.global_critic.train(
states, td_targets)
self.actor.model.set_weights(
self.global_actor.model.get_weights())
self.critic.model.set_weights(
self.global_critic.model.get_weights())
state_batch = []
action_batch = []
reward_batch = []
td_target_batch = []
advatnage_batch = []
episode_reward += reward[0][0]
state = next_state[0]
print('EP{} EpisodeReward={}'.format(CUR_EPISODE, episode_reward))
wandb.log({'Reward': episode_reward})
CUR_EPISODE += 1
def run(self):
self.train()
def main():
env_name = 'CartPole-v1'
agent = Agent(env_name)
agent.train()
if __name__ == "__main__":
main()
4.PPO
Proximal Policy Optimization Algorithms
PPO, on policy, actor critic, Both discrete continuous action space, 2017
算法:

python实现:
import wandb
import tensorflow as tf
from tensorflow.keras.layers import Input, Dense
import gym
import argparse
import numpy as np
tf.keras.backend.set_floatx('float64')
wandb.init(name='PPO', project="deep-rl-tf2")
parser = argparse.ArgumentParser()
parser.add_argument('--gamma', type=float, default=0.99)
parser.add_argument('--update_interval', type=int, default=5)
parser.add_argument('--actor_lr', type=float, default=0.0005)
parser.add_argument('--critic_lr', type=float, default=0.001)
parser.add_argument('--clip_ratio', type=float, default=0.1)
parser.add_argument('--lmbda', type=float, default=0.95)
parser.add_argument('--epochs', type=int, default=3)
args = parser.parse_args()
class Actor:
def __init__(self, state_dim, action_dim):
self.state_dim = state_dim
self.action_dim = action_dim
self.model = self.create_model()
self.opt = tf.keras.optimizers.Adam(args.actor_lr)
def create_model(self):
return tf.keras.Sequential([
Input((self.state_dim,)),
Dense(32, activation='relu'),
Dense(16, activation='relu'),
Dense(self.action_dim, activation='softmax')
])
def compute_loss(self, old_policy, new_policy, actions, gaes):
gaes = tf.stop_gradient(gaes)
old_log_p = tf.math.log(
tf.reduce_sum(old_policy * actions))
old_log_p = tf.stop_gradient(old_log_p)
log_p = tf.math.log(tf.reduce_sum(
new_policy * actions))
ratio = tf.math.exp(log_p - old_log_p)
clipped_ratio = tf.clip_by_value(
ratio, 1 - args.clip_ratio, 1 + args.clip_ratio)
surrogate = -tf.minimum(ratio * gaes, clipped_ratio * gaes)
return tf.reduce_mean(surrogate)
def train(self, old_policy, states, actions, gaes):
actions = tf.one_hot(actions, self.action_dim)
actions = tf.reshape(actions, [-1, self.action_dim])
actions = tf.cast(actions, tf.float64)
with tf.GradientTape() as tape:
logits = self.model(states, training=True)
loss = self.compute_loss(old_policy, logits, actions, gaes)
grads = tape.gradient(loss, self.model.trainable_variables)
self.opt.apply_gradients(zip(grads, self.model.trainable_variables))
return loss
class Critic:
def __init__(self, state_dim):
self.state_dim = state_dim
self.model = self.create_model()
self.opt = tf.keras.optimizers.Adam(args.critic_lr)
def create_model(self):
return tf.keras.Sequential([
Input((self.state_dim,)),
Dense(32, activation='relu'),
Dense(16, activation='relu'),
Dense(16, activation='relu'),
Dense(1, activation='linear')
])
def compute_loss(self, v_pred, td_targets):
mse = tf.keras.losses.MeanSquaredError()
return mse(td_targets, v_pred)
def train(self, states, td_targets):
with tf.GradientTape() as tape:
v_pred = self.model(states, training=True)
assert v_pred.shape == td_targets.shape
loss = self.compute_loss(v_pred, tf.stop_gradient(td_targets))
grads = tape.gradient(loss, self.model.trainable_variables)
self.opt.apply_gradients(zip(grads, self.model.trainable_variables))
return loss
class Agent:
def __init__(self, env):
self.env = env
self.state_dim = self.env.observation_space.shape[0]
self.action_dim = self.env.action_space.n
self.actor = Actor(self.state_dim, self.action_dim)
self.critic = Critic(self.state_dim)
def gae_target(self, rewards, v_values, next_v_value, done):
n_step_targets = np.zeros_like(rewards)
gae = np.zeros_like(rewards)
gae_cumulative = 0
forward_val = 0
if not done:
forward_val = next_v_value
for k in reversed(range(0, len(rewards))):
delta = rewards[k] + args.gamma * forward_val - v_values[k]
gae_cumulative = args.gamma * args.lmbda * gae_cumulative + delta
gae[k] = gae_cumulative
forward_val = v_values[k]
n_step_targets[k] = gae[k] + v_values[k]
return gae, n_step_targets
def list_to_batch(self, list):
batch = list[0]
for elem in list[1:]:
batch = np.append(batch, elem, axis=0)
return batch
def train(self, max_episodes=1000):
for ep in range(max_episodes):
state_batch = []
action_batch = []
reward_batch = []
old_policy_batch = []
episode_reward, done = 0, False
state = self.env.reset()
while not done:
# self.env.render()
probs = self.actor.model.predict(
np.reshape(state, [1, self.state_dim]))
action = np.random.choice(self.action_dim, p=probs[0])
next_state, reward, done, _ = self.env.step(action)
state = np.reshape(state, [1, self.state_dim])
action = np.reshape(action, [1, 1])
next_state = np.reshape(next_state, [1, self.state_dim])
reward = np.reshape(reward, [1, 1])
state_batch.append(state)
action_batch.append(action)
reward_batch.append(reward * 0.01)
old_policy_batch.append(probs)
if len(state_batch) >= args.update_interval or done:
states = self.list_to_batch(state_batch)
actions = self.list_to_batch(action_batch)
rewards = self.list_to_batch(reward_batch)
old_policys = self.list_to_batch(old_policy_batch)
v_values = self.critic.model.predict(states)
next_v_value = self.critic.model.predict(next_state)
gaes, td_targets = self.gae_target(
rewards, v_values, next_v_value, done)
for epoch in range(args.epochs):
actor_loss = self.actor.train(
old_policys, states, actions, gaes)
critic_loss = self.critic.train(states, td_targets)
state_batch = []
action_batch = []
reward_batch = []
old_policy_batch = []
episode_reward += reward[0][0]
state = next_state[0]
print('EP{} EpisodeReward={}'.format(ep, episode_reward))
wandb.log({'Reward': episode_reward})
def main():
env_name = 'CartPole-v1'
env = gym.make(env_name)
agent = Agent(env)
agent.train()
if __name__ == "__main__":
main()