python代码分析目标跟踪中的卡尔曼滤波
1. 什么是卡尔曼滤波
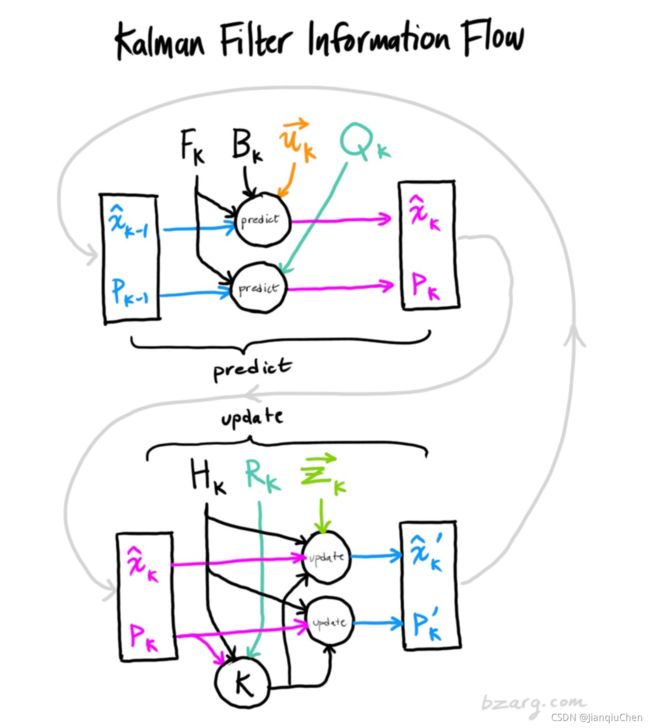
卡尔曼滤波(Kalman filter)是一种高效的自回归滤波器,它能在存在诸多不确定性情况的组合信息中估计动态系统的状态,是一种强大的、通用性极强的工具。它的提出者,鲁道夫.E.卡尔曼,在一次访问NASA埃姆斯研究中心时,发现这种方法能帮助解决阿波罗计划的轨道预测问题,后来NASA在阿波罗飞船的导航系统中确实也用到了这个滤波器。最终,飞船正确驶向月球,完成了人类历史上的第一次登月。
– 引用自以下两个链接(对应中英文链接),第一次了解卡尔曼滤波的同学强烈推荐阅读以下两篇文章。
How a Kalman filter works, in pictures
图说卡尔曼滤波,一份通俗易懂的教程
2. 为什么要用卡尔曼滤波
卡尔曼滤波可以对存在不确定信息的动态系统的下一步的状态进行有根据的推测,即便有噪声信息干扰,卡尔曼滤波通常也能很好的弄清楚究竟发生了什么,找出现象间不易察觉的相关性。
在目标跟踪任务中,卡尔曼滤波可以对物体的运动信息进行建模,通过已有运动轨迹对下一步进行合理有效的估计。
3. 代码分析卡尔曼滤波
共有以下几个步骤
(1)类初始化__init__
(2)初始化状态(mean)与状态协方差(covariance)的函数initiate
(3)预测阶段函数predict
(4)分布转换函数project
(5) 更新阶段函数update
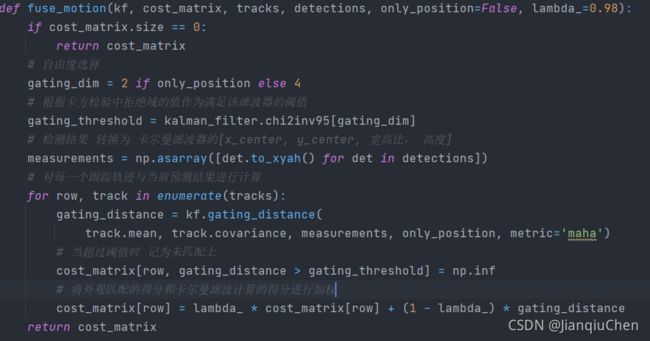
(6) 计算状态分布和测量(检测框)之间距离函数gating_distance
-
方法初始化

-
初始化状态(mean)与状态协方差(covariance)的初始化函数initiate
根据物理特性 目标框在图像的高度代表了目标距离的远近与变化情况 故使用measurement中的高度对方差进行初始化。

-
预测阶段函数predict
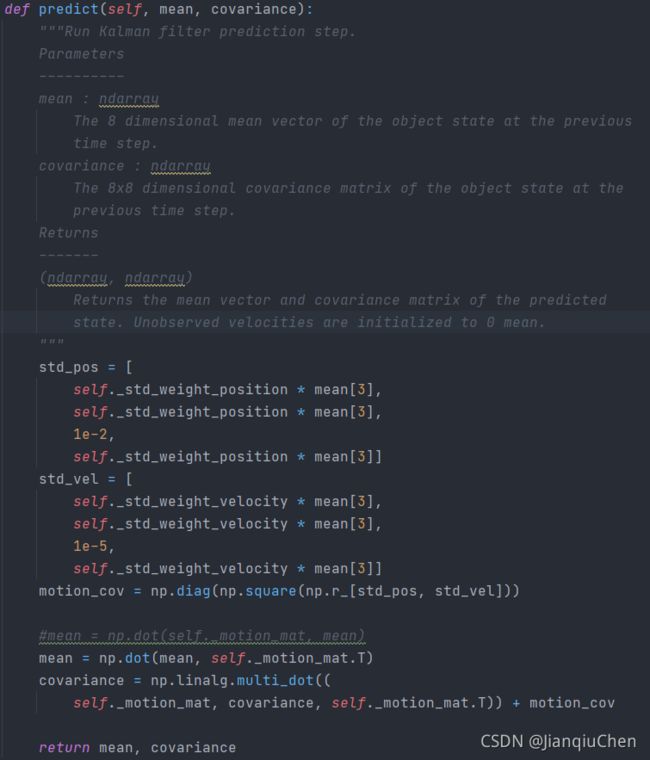
-
分布转换函数project
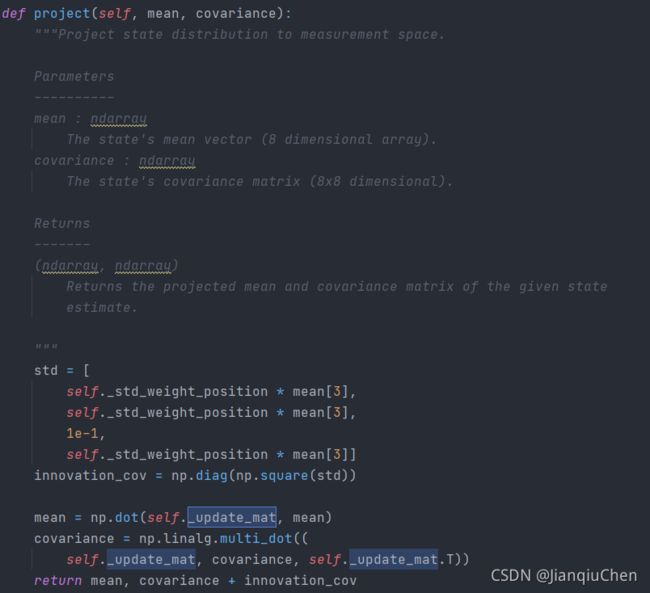
-
更新

-
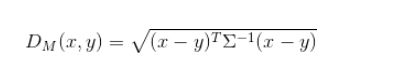
计算距离(马氏距离)
马氏距离(Mahalanobis
Distance)是一种距离的度量,可以看作是欧氏距离的一种修正,修正了欧式距离中各个维度尺度不一致且相关的问题。

4 多目标跟踪中的卡尔曼滤波
5 总结
卡尔曼滤波的思想是通过对预测结果的统计分析与迭代更新来总结出一些运动信息,减少异常值出现的概率,在目标跟踪任务中大多作为一个优秀的运动模型使用,帧间的位移假设为线性匀速模型。在一些跟踪模型中,大多数采用图像的目标框的预测结果和卡尔曼滤波器的结果加权得到目标框最终的结果和轨迹匹配结果。