Extraction of individual trees based on Canopy Height Model to monitor the state of the forest
ABSTRACT
主动遥感数据可用于执行各种林业任务,包括林分特征、库存、森林管理和火灾行为建模。目前的工作通过处理基于冠层高度模型 (CHM) 的个体树木检测 (ITD) 和大面积点云的树木分割,研究了机载激光扫描 (ALS) 派生方法在落叶林中应用的潜力。测试了不同的算法并评估了它们的性能,以显示与ground truth相比,它们中的哪一种可以提供最充足的树木数量。树木规模信息用于确定林龄。森林高度、结构和密度是通过应用个体树检测 (ITD) 来计算一些森林属性(例如茎体积、森林均匀性和生物量估计)来指定的。这篇文章的主要目的是检查森林的状态以实时监控它。我们假设利用最初根据 LiDAR 数据为 ITD 构建的 LM 算法,树木应该以合理的精度自动与 ALS 衍生的 CHM 区分开来。因此,本研究工作研究了固定树顶窗口大小 (FWS)、固定平滑窗口大小 (SWS) 和可变窗口 (VW) 对 ITD 性能的影响(RMSE=3.4% 和 R=0.88)。很明显,从获得的结果来看,较小的窗口大小会导致更多的树。事实上,最小的树被包含附近最高点的最大树遮挡,通常会被大窗户忽略。还探索了树冠描绘以提取树木的高度、半径树冠和 3D 坐标,并将它们与低蓝牙传感器“iBeacon”检测到的值进行比较。
1. Introduction
森林管理和养护是提供森林状况概览、保证和确保森林可持续性的主要和有效战略。为此,我们在本文中编制了一份森林清单。主动遥感技术ALS产生的3D点云包含森林垂直结构的信息,从树冠的顶部到地面(Shin等人,2018年)。事实上,ALS数据通常用于获得精确的地形高程特征,并提供有关森林组成、分布和状况的准确信息(Snchez等人,2018年)。一些研究侧重于利用激光雷达数据对树种进行分类(Wallace等人,2012年)。许多研究人员认为ALS主动遥感是一种强有力的工具,用于提取林分指标、树级统计数据,并以丰富得多的信息管理森林。最近,使用ALS数据中的数据对单个树木进行检测和对森林参数进行建模在森林的监测和可持续管理中变得非常重要,因为它们在短时间内提供了关于整个森林区域的森林属性的高度精确和空间全面的信息(Silva等人,2016年)。在过去十年中,遥感一直是用于分析单棵树的有用工具(Lee等人,2016年)。尽管卫星的空间分辨率不足导致只有机载系统具有足够的空间分辨率来执行单棵树分析,但机载激光雷达的最新进展已经提供了高水平分辨率和垂直维度的信息。然而,很难充分利用小覆盖区激光雷达数据并将其用于详细的树木分析。此外,用于量化森林生物量和使用激光雷达数据测量森林属性的程序也在快速改进,因为它们基于稳健和复杂的建模。事实上,树木的特征需要优先的个体检测(ITD)。后者,也称为树分割,对于森林防火目的是至关重要的,因为它决定了估计的维护行动的精度,因此,它显示了森林管理的有效性。该过程允许使用多种方法检测单个树木,并从激光雷达导出的CHM中描绘它们,这些方法包括使用平滑或随机可变窗口的局部极大值(LM)检测、山谷跟踪(VF)、模板匹配™、尺度空间(ss)理论、马尔可夫随机场(MRFs)和标记点过程(MPP) (Dalponte等人,2015年;Kwak等人,2006年;Perrin等人,2006年;席尔瓦等人,2016;斯托克等人,2016)。当应用于从上述技术获得的CHM时,这些算法保证了有效的ITD性能。例如,LM 方法在 LiDAR 衍生的 CHM 上的应用形成了一个完善的框架,在最近的多项研究中得到了实施,这些研究已经获得了令人满意的 ITD 精度(Koch 等人,2006 年;Snchez 等人,2018 年)。尽管如此,这些方法是专门为测量巨大的绿地或物体而创建的。因此,他们需要使用昂贵的传感器、训练有素的工人和高精度的计算技术来获得准确的结果。在 (Harding et al, 2011) 中,作者指出,对于不同类型的森林,单个树木的检测率在 40% 到 80% 之间变化,而研究人员在 (F. Polewski, 2017) 中报告说,检测率从 40% 到北方针叶树的 % 到 90%。根据 (Harding et al, 2011),ITD 取决于树密度和聚类,而不是所使用的算法。然而,Ayrey 等人指出算法的结果在很大程度上取决于森林的类型。 Hill 等人 (2017) 得出结论,树木密度参数不会显着影响树木属性的估计。另一方面,各种无线数据交换协议,如蓝牙、低功耗蓝牙(BLE)和ANT无线,也可以用作定位系统。例如,蓝牙通常用于传输数据和连接设备(例如无线耳机、键盘、控制器等)(Bayne 等人,2017 年;Keefe 等人,2019 年)。它还可以为用户提供本地化和接近意识。例如,它已有效地集成到危险接近检测和实时警报系统中,以提高森林场地的安全性(Thiel 等人,2020 年)。蓝牙现在主要用于将有关自然资源的原始数据传输到移动设备,例如林业工人佩戴的健身监测器(Bayne 等人,2017 年;Thiel 等人,2020 年)或环境传感器,如 KestrelTM 天气计(Riddering 等人, 2015)。在此背景下,我们在研究中探索使用 BLE“iBeacon”来跟踪树木位置的变化。蓝牙信标是一种小型低功耗无线发射器,它使用低功耗蓝牙 (Bluetooth LE) 技术向范围内的兼容智能手机发送信号。当部署在森林内时,这些蓝牙信标有助于创建树木微定位服务,使它们能够主动交流信息。在这项工作中,检查的 LiDAR 特性通常与高程和强度通道有关。本文的主要目的是提取冠层高模型、个体树木检测和树木分割,以调查我们的森林。我们假设利用最初为 ITD 从 LiDAR 数据构建的 LM 算法,可以以合理的精度自动区分个别树木与 ALS 衍生的 CHM。因此,这项工作揭示了固定树顶窗口大小 (FWS)、固定平滑窗口大小 (SWS) 和随机变量窗口 (RVW) 影响 ITD 性能。因此,单独提取树木以保存它们的位置并将它们与从低蓝牙传感器“iBeacon”检测到的位置进行比较。此方法由 R 包 LidR 和 ForestTools 开发,以确保对圣戈班森林的持续监测。为此,本文提出了一种智能化的森林环境监测解决方案。传感器监测树木状态、温度、气体浓度、土壤湿度等参数,而我们的算法允许将生成的事件分类为以下类别之一,分析背景声音:来自电锯、车辆的背景噪音,或森林。通过允许用户接收通知的互联网和移动应用程序确保用户访问收集到的数据。每当检测到火灾、污染源或非法砍伐森林时。我们的环境监测解决方案是一个物联网项目,适用于各种森林。
2. Materials and Method
所提出的方法由两个主要步骤组成:i)CHM 生成和 ii)个体树检测(ITD)。它允许从对象级别(树)的 ALS 数据派生特征。对点云进行预处理,以去除异常值并确定地面点。实施开源 R 包(Roussel 等人,2020 年)的功能以开发冠层高度模型(CHM)并利用局部最大值执行 ITD( LM)具有可变和固定窗口的算法。在树木检测步骤之后,模拟树木的 3d 坐标并将其与从 BLE 中提取的位置进行比较以进行位置传输,以检测树冠的变化。在落叶林中检测到并处理了 1126 棵树。个体树研究的过程如图 1 所示。
2.1. Study area
研究区是圣戈班国家森林的一部分,位于上法兰西地区埃纳省(北纬 49° 35’ 00”,东经 3° 25’ 00”)。它占地8,470公顷。 (图2)。森林地点代表低地阔叶林,包括橡树 (QuercusQuercus) (41%)、山毛榉 (Fagus sylvatica) (34%) 和许多其他落叶树种,如白蜡树 (Fraxinus excelsior)、鹅耳枥 (Carpinus betulus)、桦树 (Betula) )、樱桃 (Prunus avium)、板栗 (Castanea)、椴树 (Tilia)、枫树 (Acer)、榆树 (Ulmus)、桤木 (Alnus)、白梁 (Sorbus) 和杨树 (Populus)。它的地势由石灰岩土丘组成,中间夹杂着潮湿和酸性凹陷。
2.2. Studied Field characteristics
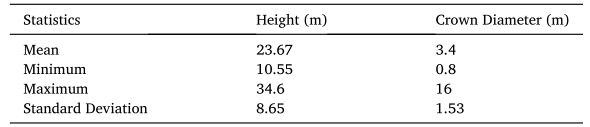
ONF(Office National des Forest)是负责管理国家森林、城市森林和生态保护区的法国政府机构,收集现场数据。它的总部设在巴黎。研究区包含 180 个圆形地块(半径 15m)。对所有胸径大于17.5cm的树木进行胸径测量,并进行树种鉴定。在每个地块中检测到个体树高、树冠直径和 3D 坐标。这些实地测量是在适应森林挑战的实地研究之后制定的。根据测量结果,制定了清单,确定了长期目标,并制定了 20 多年的行动计划。表 1 显示了多叶地块的子地块值的描述性统计。
2.3. Preprocessing and acquisition of LiDAR data

图 1 单株检测监测流程图

图 2. 研究区位置——法国圣戈班森林。
表 1 现场库存数据描述性统计。
ALS 数据是在 2015 年 2 月使用 Riegl LMS680i 系统在 115 公里范围内专门用于森林分析的。它们以 LAZ 格式呈现。该系统在 660 米的高度运行,飞行线路重叠率为 50%,扫描角度范围为 50∘ (+/- 25∘),脉冲密度为 10 个脉冲/米。首先,应用高度阈值法去除原始数据中的噪声点,然后对点云进行分类。随后,在提取地面点后,使用反距离加权 (IDW) 方法对地面点进行插值,以创建数字高程模型 (DEM)。最后,为了构建 CHM,使用 DEM 对处理后的点云高度 (z) 进行归一化。数字表面模型 (DSM) 和冠层高度模型 (CHM) 将 ALS 返回的最高海拔表示为栅格图层。引入了不同的技术来创建 DSM 和 CHM。在进行的实验中,使用用户定义的像素大小创建了 1m 的网格分辨率,并将最高点的高程分配给每个网格单元。此外,DSM 和 DTM(数字地形模型)用于标准化处理后的点云高度(z)(Gomroki 等,2017)以生成 CHM(图 3)。应用了 CHM 的后处理,以便平滑或填充由于使用点到栅格方法而产生的空像素,无需任何调整。图 4 显示了具有负值的 CHM 和清洁/平滑空像素后的 CHM。树冠影响或首次返回 LiDAR 点的插值步骤是与数字表面模型 (DSM) 匹配的规则网格的常见做法。
2.4. Canopy Height Model (CHM)
树冠命中率与匹配的 LiDAR 衍生地形高程值之间的差异用于计算树冠高度模型。在基于坡度的技术中,采用迭代方法从原始 LiDAR 数据点构建地形模型。首次返回 LiDAR 点的 DSM 的网格大小为 0.5 米,以利用 LiDAR 点密度,从而实现单个树木的 3D 表面表示。每 0.25 米的 LiDAR 点密度是通过在第一个返回的 LiDAR 点上叠加一个 0.5×0.5 米的网格来计算的。同一小区内激光雷达站点的平均高差为 0.44 米,范围为 0 至 29.73 米,标准差为 1.8 米。如此小的区域的这种高海拔变化是由于 LiDAR 站点与附近飞行路线的入射角不同,或者是由于具有相同入射角的激光脉冲的穿透高度不同。事实上,处理方法必须准确地确定顶部植被表面才能测量树高。为了控制更多的插值结果,只有每个单元格中的最高 LiDAR 高程与克里金法一起使用以获得顶级 DSM。使用所有首次返回点云对 DSM 进行插值会导致表面略低,这可能会导致 LiDAR 低估树高。最近的研究(McCombs 等人,2003 年;Nilsson,1996 年;Nsset 和 Akland,2002 年)将主动传感器对树高的低估归因于更频繁地对树冠肩部而不是树尖进行激光采样。结果,冠层高度偏向于较低的值,这也可能是由用于生成 LiDAR 表面的技术造成的。从顶部 DSM 中减去景观高程以生成树冠高度模型(图 3)。因此,确定地面高程的精度会显着影响估算树高的准确性。
2.5. Individual Tree Detection (ITD)
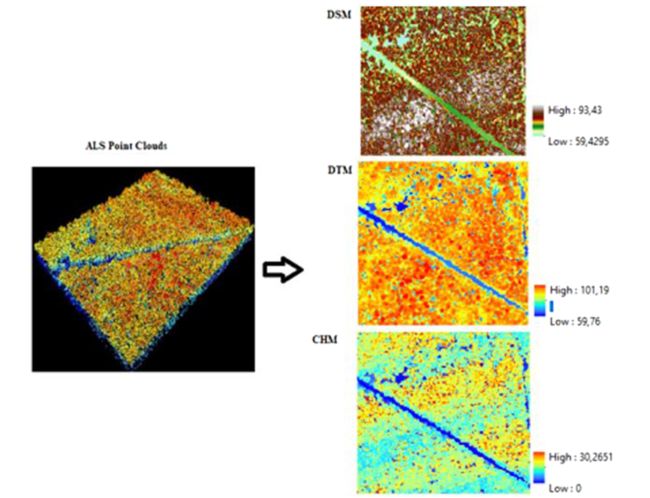
图 3. CHM 生成模型。
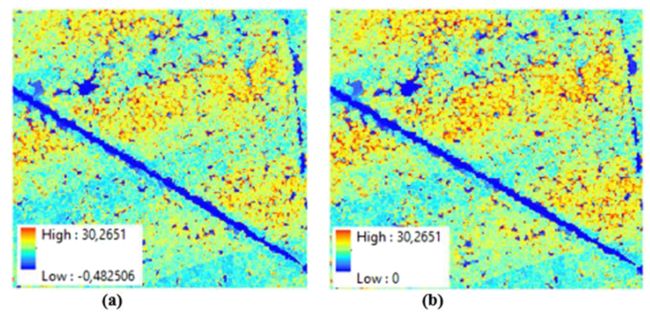
图 4. CHM 后处理:(a) 表示具有负值的 CHM,(b) 显示平滑后的 CHM。
在 Wulder 等人 (2000) 中,作者使用可变窗口大小从花旗松和西部红柏种群 (Thuja plicata) 的高空间分辨率照片中提取树木位置并估计断面面积。他们使用的窗口大小为 3 x 3、5 x 5 和 7 x 7 m,空间分辨率为 1 m。考虑半方差范围和斜率的局部中断来确定分配给每个像素的可变窗口大小。在同一背景下,(Popescu, 2002) 探索了两种方法来估计同一圆形区域的树高。第一种技术基于地面实况数据覆盖区域内所有激光脉冲的高度。然而,第二种树高估计方法依赖于使用可变窗口方法和局部最大值 (LM) 焦点过滤的单树识别。获得的研究结果表明,通过定位单个树木来确定平均树高的策略优于第一种在子地块内使用所有激光高度读数的技术。在最后的研究中,使用了一个可变的方形窗口来识别树木。 Daley 等人采用类似的方法,通过改变窗口大小和纹理分析(Daley 等人,1998)使用高分辨率光学图像(MEIS-II)来估计花旗松林中树冠的位置。
2.6. Individual Tree Detection (ITD)
在 Wulder 等人 (2000) 中,作者使用可变窗口大小从花旗松和西部红柏种群 (Thuja plicata) 的高空间分辨率照片中提取树木位置并估计断面面积。他们使用的窗口大小为 3 x 3、5 x 5 和 7 x 7 m,空间分辨率为 1 m。考虑半方差范围和斜率的局部中断来确定分配给每个像素的可变窗口大小。在同一背景下,(Popescu, 2002) 探索了两种方法来估计同一圆形区域的树高。第一种技术基于地面实况数据覆盖区域内所有激光脉冲的高度。然而,第二种树高估计方法依赖于使用可变窗口方法和局部最大值 (LM) 焦点过滤的单树识别。获得的研究结果表明,通过定位单个树木来确定平均树高的策略优于第一种在子地块内使用所有激光高度读数的技术。在最后的研究中,使用了一个可变的方形窗口来识别树木。 Daley 等人采用类似的方法,通过改变窗口大小和纹理分析(Daley 等人,1998)使用高分辨率光学图像(MEIS-II)来估计花旗松林中的树冠位置。本研究工作中采用的 LM 技术采用两种搜索窗口形状:方形 n×n 窗口和圆形窗口,后者在识别树冠方面效率更高。该算法在用于 ALS 处理的 R 包 lidR 中实现。 LM 方法假设空间邻域中的高激光值代表树冠的尖端(Larsen 等人,2011)。正确选择过滤器窗口大小可以使用 LM 方法成功识别树的位置。当过滤器尺寸太小或太大时,就会出现委托或遗漏错误。因此,可变窗口 LM 技术基于树冠具有不同大小的假设,并且移动 LM 滤波器应设置为与 LiDAR 图像和地面上发现的空间结构相对应的适当大小。 LM 过滤器对具有单一明确顶点的树木最有效,例如硬木树种。各种几何形状,如圆锥形、抛物线形和椭圆形,或它们的组合与树冠形态有关。 Doruska 和 Burkhart(Doruska 和 Burkhart,1994 年)评估了火炬松树冠的圆形树枝分布,并得出结论认为圆形均匀分布在大多数情况下就足够了。因此,很明显,使用可变直径的圆形窗口搜索 LM 并识别单个牙冠优于使用方形窗口进行过滤。在我们的工作中,基于 CHM 高度应用了 LM 算法。窗口大小从 3 x 3 到 11 x 11 像素不等,对应的树冠直径范围从 1.12 m 到 29.3 m。最小阈值用于将一个地方指定为树梢,因此,防止在植被高度低的区域识别局部最大值,即树木。
2.7. Individual Tree Crown Segmentation (ITCS)
ITC 描绘方法首先通过应用由(Popescu 和 Wynne,2004 年)开发的可变窗口过滤算法 (VWF) 检测主要树梢。总之,移动窗口扫描 CHM。如果发现某个单元格在窗口内最高,则将其标记为树梢。窗口大小根据其居中的像元高度而变化,这解释了树冠大小的差异,高大的树木具有较宽的树冠,反之亦然。因此,ITCS 的第一步是构造负责定义动态窗口大小的函数。这个函数应该基本上接受一个 CHM 单元格值(即那个地方地面以上的树冠高度)并返回搜索窗口的半径。定义了一个基本的线性方程。由于我们的目标不是通过使用“vwf”函数来标记低洼的灌木丛或其他错误的树梢,因此在本研究中使用了 minHeight 参数来建立 2 m 的最小高度。因此,任何具有较低值的单元格都不会被归类为树梢。 VWF 返回的树梢对象包含每个已识别树梢的空间坐标以及两个默认属性:高度和 winRadius。这些属性是树离地高度和树所在的可移动窗口的半径。需要注意的是,winRadius 并不总是与树冠半径相当。另一方面,树冠高度模型经常描绘连续而茂密的树林,树冠相互摩擦。从这种类型的森林中勾勒出单独的树冠形状被称为冠层分割。事实上,每个牙冠轮廓都由一个线段表示。一旦从树冠高度模型中识别出一组树梢,就可以使用“mcws”函数。该函数基于名为imager的R库实现分水岭算法。在地形分析中,分水岭算法被广泛用于描绘流域。由于倒置树冠和景观模型之间的形态相似性,可以使用相同的方法来描绘树冠。通过采用标记控制的分割方法(Beucher 和 Meyer,2018 年)可以减少这种不准确的来源,其中分水岭算法受标记集合的限制——在本例中为树梢。
2.8. Model Accuracy Evaluation
本研究使用行列式系数(R∘)和均方根误差(RMSE)来评估与现场数据相比,个体树木检测特征的正确性。 R∘反映了自变量和因变量之间的关系。 R2((2))数越大,自变量和因变量之间的相关性越强。 RMSE((1))反映了实测值与预期值之间的标准误差,与评价对象值有很强的相关性。 RMSE 分数越低,模型的预测效果就越大:

其中 ̂y 和 yi 分别是由引入模型测量的特征和由第 i 棵树的 ground truth 获得的特征; n 是验证树的总数。
2.9. Use of location sensors in forests
基于位置的服务 (LBS) 是指使用个人或移动物体的实时地理位置的服务,由射频 (RF)、蓝牙或低功耗蓝牙能量 (BLE)、GNSS(全球导航)确定卫星系统)、辅助 GNSS(设备的永久定位)或高速卫星网络(Li 等人,2016 年)。它们可以包括由用户激活的响应式服务,例如映射位置或查看附近的兴趣点,或者当用户进入指定区域时自动启动的主动式服务(Lakhwani 等人,2019 年)。实际上,LBS 需要用户和服务提供商之间通过无线网络进行实时数据交换,通常是通过智能手机等移动设备进行(Ghodsi,2006 年;Li 等人,2016 年)和(app,2020 年)。该数据可用于跟踪其他人的位置,例如寻找朋友或基于应用程序的定位服务,这些服务使用设备的位置来触发操作或通知。 LBS 的一个简单示例是根据用户移动到某个时区来更新移动设备上的日期和时间(Lakhwani 等人,2019 年;Li 等人,2016 年)。随着 Apple 的 iBeacon 信标和 Google Eddystone 等消费者信标发射器的可用性,任何物体都可以使用 BLE(Beacon 定位器应用程序)将位置信息传输到移动设备。这种方法虽然是为城市地区的零售营销而开发的,但也可以集成到林业娱乐、教育和外展以及使用户外信标和当前可用软件开发平台的物流应用中。 LBS 也可用于导航(例如 goo,2018 地图)、车队和资产管理、个人安全、移动营销、手机游戏、兴趣点(例如寻找附近的商店或餐馆)以及改进的紧急服务(例如允许追踪)通过查询设备的 GNSS 坐标从手机拨打 911 的电话)(Li 等人,2016 年)。 De Longueville 等人使用 Twitter 消息作为 LBS 的一种形式来实时收集有关火灾移动的空间和时间信息(Li 等人,2016 年)。在此背景下,我们使用了应用蓝牙低功耗 (BLE) 技术的“iBeacon”来传输唯一标识符和其他数据。它提供比 GPS 更精确的定位,将单个“iBeacon”放在树上。它会向用户发送通知,告知该树会在特定时间段内移位(Lakhwani 等人,2019 年)。这个想法源于这样一个事实,即在过去两年中,风暴、长期干旱(2018 年春季和 2019 年春季、2018 年夏季)和树皮甲虫袭击等多种压力因素影响了研究森林。目标是从通过 iBeacons 收集的树的位置收集树的 3D 坐标。在此过程中,算法 1 和体系结构系统(如图 5 所示)用于提取每个树冠的 3D 坐标,以监测它们的树冠变化并显示它们是否会导致树木砍伐。

图 5. 基于“ibeacon”传感器的系统架构。
5. Conclusion
在本文中,为了应用两种不同的树木分割方法,开发了树冠高度模型来检测个体树木。第一种技术基于分割点云级别,而第二种方法依赖于 CHM 分割(1。因此,我们证明了窗口大小对局部最大滤波器算法效率的影响。该过程基于 ALS 数据进行了测试在圣戈班森林的惯性测量单元 (IMU) 上。获得的研究结果表明,LiDAR 数据可用于通过关注个体树的水平来准确估计地块级树高。然而,尽管创建个体树冠很重要对于来自高光谱和空间分辨率摄影的森林清单,研究界尚未深入研究这一主题(Beucher 和 Meyer,2018 年)。在这种情况下,LiDAR 是最适合用于生成准确的地形高程模型和测量森林树冠中树木的高度。这项研究的目标是创建强大的处理和分析工具,以促进 LiDAR 数据的使用r 在个体树水平上预测树冠和高度的目的。 LiDAR 覆盖的整个森林区域的个体树木高度由用于测量森林高度的算法提供。由于事实证明,与树龄相关的树高是最实用、最一致且最相关的场地质量指标,因此这些发现对森林管理具有深远的影响。位置传感器的集成可以更精确地了解圣戈班森林的状况,从而更好地监测其特征。作为未来工作的开端,我们将模拟 3D 网络服务,以收集有关森林冠层和树木检测的信息,并研究野火的风险。