OpenGL - Model Loading
一个非常流行的模型导入库是Assimp,它是Open Asset Import Library的缩写。Assimp能够导入很多种不同的模型文件格式(并也能够导出部分的格式),它会将所有的模型数据加载至Assimp的通用数据结构中。当Assimp加载完模型之后,我们就能够从Assimp的数据结构中提取我们所需的所有数据了。由于Assimp的数据结构保持不变,不论导入的是什么种类的文件格式,它都能够将我们从这些不同的文件格式中抽象出来,用同一种方式访问我们需要的数据。
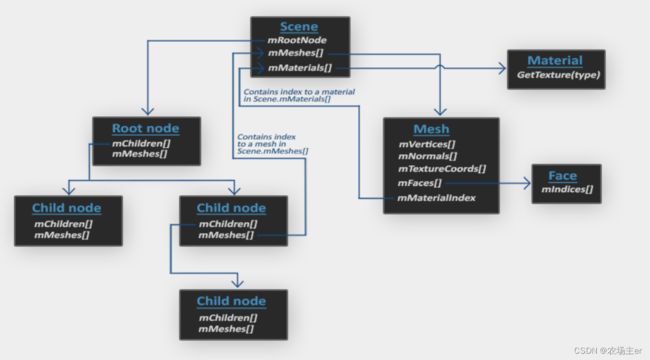
当使用Assimp导入一个模型的时候,它通常会将整个模型加载进一个场景(Scene)对象,它会包含导入的模型/场景中的所有数据。Assimp会将场景载入为一系列的节点(Node),每个节点包含了场景对象中所储存数据的索引,每个节点都可以有任意数量的子节点。Assimp数据结构的(简化)模型如下:
- 和材质和
网格(Mesh)一样,所有的场景/模型数据都包含在Scene对象中。Scene对象也包含了场景根节点的引用。 - 场景的
Root node(根节点)可能包含子节点(和其它的节点一样),它会有一系列指向场景对象中mMeshes数组中储存的网格数据的索引。Scene下的mMeshes数组储存了真正的Mesh对象,节点中的mMeshes数组保存的只是场景中网格数组的索引。 - 一个
Mesh对象本身包含了渲染所需要的所有相关数据,像是顶点位置、法向量、纹理坐标、面(Face)和物体的材质。 - 一个网格包含了多个面。
Face代表的是物体的渲染图元(Primitive)(三角形、方形、点)。一个面包含了组成图元的顶点的索引。由于顶点和索引是分开的,使用一个索引缓冲来渲染是非常简单的(见你好,三角形)。 - 最后,一个网格也包含了一个
Material对象,它包含了一些函数能让我们获取物体的材质属性,比如说颜色和纹理贴图(比如漫反射和镜面光贴图)。
首先定义绘制需要的Mesh类:
#ifndef MESH_H
#define MESH_H
#include 然后定义导入模型的Model类:
#ifndef MODEL_H
#define MODEL_H
#include 完整的绘制源码可以参考: -> ->