详解Transformer中的Positional Encoding
文章目录
- 一、为什么要有Positional Encoding?
- 二、怎么定义Positional Encoding?
-
- 直接编号
- 对每个位置 p o s pos pos作归一化
- 总结一下,position encoding的定义要满足下列需求:
- 函数型
- 三、论文中的公式
-
- 具体描述
- 四、为什么公式可以体现出相对次序关系?
-
- 1.相对次序关系怎么表示?
- 2.那论文公式满足这个相对次序关系的表示吗?
参考:
- https://arxiv.org/abs/1706.03762
- https://www.zhihu.com/question/347678607
- https://kazemnejad.com/blog/transformer_architecture_positional_encoding/#what-is-positional-encoding-and-why-do-we-need-it-in-the-first-place
- https://blog.csdn.net/Datawhale/article/details/119582757?utm_medium=distribute.pc_aggpa
证明部分:
- https://kazemnejad.com/blog/transformer_architecture_positional_encoding/#what-is-positional-encoding-and-why-do-we-need-it-in-the-first-place
- https://timodenk.com/blog/linear-relationships-in-the-transformers-positional-encoding/
一、为什么要有Positional Encoding?
像论文中介绍的,由于Transformer中没有循环以及卷积结构,为了使模型能够利用序列的顺序,作者们需要插入一些关于tokens在序列中相对或绝对位置的信息。因此,作者们提出了“Positional Encoding位置编码”的概念。
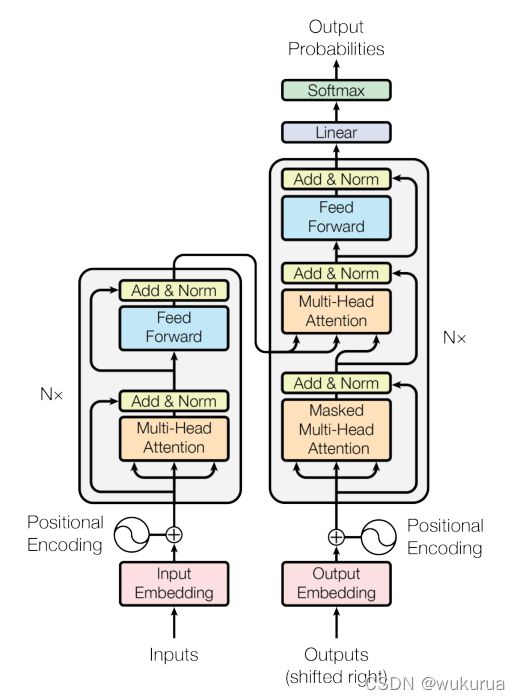
Positional Encoding和token embedding具有同样的维度,Positional Encoding和token embedding可以直接相加,结果作为Encoder和Decoder的底部输入。
二、怎么定义Positional Encoding?
现在知道我们需要Positional Encoding,那怎么定义它呢?
我们可以从头构思一下,直接编号行不?
直接编号
假设给定一个长度为 T T T 的序列,token在序列中的位置记作 p o s pos pos,那么token的位置编码
P E = p o s = 0 , 1 , 2 , . . . , T − 1 PE=pos=0,1,2,...,T-1 PE=pos=0,1,2,...,T−1
但是这就有个问题,如果有一段很长的序列(假如为1000),那么最后一个token的位置编码非常大,这是很不合适的:
- 它比第一个token的编码大太多,和token embedding合并以后难免会出现特征在数值上的倾斜;
- 它比一般的token embedding的数值要大,模型可能会把它当作主要信息,对模型可能有一定的干扰。
那么,位置编码最好具有一定的值域范围!
对每个位置 p o s pos pos作归一化
我们可以使用序列长度 T T T 对每个位置 p o s pos pos 作归一化,也就是 P E = p o s T − 1 P E=\frac{pos}{T-1} PE=T−1pos
上面两种方法都是建立一个长度为 T T T 的词表,按词表的长度来分配position encoding,这两个方法都属于表格型。
这样固然使得所有位置编码都落入区间 [ 0 , 1 ] [0,1] [0,1],但是问题也是显著的:
不同长度序列的位置编码的步长是不同的,在较短序列中相邻的两个token的位置编码的差异,会比长序列中相邻的两个token的位置编码差异更小。如果使用这种方法,那么在长文本中相对次序关系会被“稀释”。
我们关注的位置信息,最核心的就是相对次序关系,尤其是上下文中的次序关系。也就是关注一个token与另一个token距离的相对位置(距离差几个token)。应该让位置1和位置2的距离比位置3和位置10的距离更近,位置1和位置2与位置3和位置4都只相差1。
总结一下,position encoding的定义要满足下列需求:
- 每个位置有一个唯一的positional encoding;
- 最好具有一定的值域范围,否则它比一般的字嵌入的数值要大,难免会抢了字嵌入的「风头」,对模型可能有一定的干扰;
- 需要体现一定的相对次序关系,并且在一定范围内的编码差异不应该依赖于文本长度,具有一定translation invariant平移不变性。
函数型
一种思路是使用有界的周期性函数。在前面的两种方法中,我们为了体现某个字在句子中的绝对位置,使用了一个单调的函数,使得任意后续的字符的位置编码都大于前面的字,如果我们放弃对绝对位置的追求,转而要求位置编码仅仅关注一定范围内的相对次序关系,那么使用一个sin/cos函数就是很好的选择,因为sin/cos函数的周期变化规律非常稳定,所以编码具有一定的平移不变性。如下:
P E ( p o s ) = sin ( ω ⋅ p o s ) P E(p o s)=\sin \left({\omega \cdot p o s}\right) PE(pos)=sin(ω⋅pos)
其中, ω {\omega } ω 越小,波长越长,即相邻的token的位置编码之间的差异越小。
但这样也存在一些问题:
- 如果 ω {\omega } ω 比较大,相邻token之间的位置差异不明显;
- 如果 ω {\omega } ω 比较小,在长序列中可能会有一些不同位置的token的位置编码一样,这是因为PE的值域 [ − 1 , 1 ] [-1,1] [−1,1] 的表现范围有限。
既然token embedding的维度是 d model d_{\text {model }} dmodel (论文中 d model = 512 d_{\text {model }}=512 dmodel =512),那么也可以使用一个 d model d_{\text {model }} dmodel 维向量来表示位置编码,这样的话,表示范围要远大于 [ − 1 , 1 ] [-1,1] [−1,1] ,也方便后面和token embedding直接相加。
三、论文中的公式
论文中给出:positional encoding是一个向量,且 P E → p o s ∈ R d model \overrightarrow{PE}_{pos} \in \mathbb{R}^{d_{\text {model }}} PEpos∈Rdmodel , f : N → R d model f: \mathbb{N} \rightarrow \mathbb{R}^{d_{\text {model }}} f:N→Rdmodel , P E → p o s \overrightarrow{PE}_{pos} PEpos 定义为
P E ( p o s , 2 i ) = sin ( p o s / 1000 0 2 i / d model ) P E ( p o s , 2 i + 1 ) = cos ( p o s / 1000 0 2 i / d model ) \begin{aligned} P E_{(p o s, 2 i)} &=\sin \left(p o s / 10000^{2 i / d_{\text {model }}}\right) \\ P E_{(p o s, 2 i+1)} &=\cos \left(p o s / 10000^{2 i / d_{\text {model }}}\right) \end{aligned} PE(pos,2i)PE(pos,2i+1)=sin(pos/100002i/dmodel )=cos(pos/100002i/dmodel )
也可以写作:
P E → p o s ( i ) = f ( p o s ) ( i ) : = { sin ( ω k ⋅ p o s ) , if i = 2 k cos ( ω k ⋅ p o s ) , if i = 2 k + 1 \overrightarrow{PE}_{pos}^{(i)}=f(pos)^{(i)}:=\left\{\begin{array}{ll} \sin \left(\omega_{k} \cdot pos\right), & \text { if } i=2 k \\ \cos \left(\omega_{k} \cdot pos\right), & \text { if } i=2 k+1 \end{array}\right. PEpos(i)=f(pos)(i):={sin(ωk⋅pos),cos(ωk⋅pos), if i=2k if i=2k+1
其中, ω k = 1 1000 0 2 k / d model \omega_{k}=\frac{1}{10000^{2 k / d_{\text {model }}}} ωk=100002k/dmodel 1
i i i 表示 P E → p o s \overrightarrow{PE}_{pos} PEpos 的维度, i i i 的取值范围是 [ 0 , … , d model / 2 ) \left[0, \ldots, d_{\text {model }} / 2\right) [0,…,dmodel /2)。
具体描述
我们可以想象出这是一个由每一个频率产生的 sin / cos {\sin}/{\cos} sin/cos对组成的向量(注意这里 d model d_{\text {model }} dmodel 要除以 2 2 2 ):
P E → p o s = [ sin ( ω 0 ⋅ p o s ) cos ( ω 0 ⋅ p o s ) sin ( ω 1 ⋅ p o s ) cos ( ω 1 ⋅ p o s ) ⋮ sin ( ω d model / 2 − 1 ⋅ p o s ) cos ( ω d model / 2 − 1 ⋅ p o s ) ] d model × 1 \overrightarrow{PE}_{pos}=\left[\begin{array}{c} \sin \left(\omega_{0} \cdot pos\right) \\ \cos \left(\omega_{0} \cdot pos\right) \\ \sin \left(\omega_{1} \cdot pos\right) \\ \cos \left(\omega_{1} \cdot pos\right) \\ \vdots \\ \sin \left(\omega_{d_{\text {model }} / 2-1} \cdot pos\right) \\ \cos \left(\omega_{d_{\text {model }} / 2-1} \cdot pos\right) \end{array}\right]_{d_{\text {model }} \times 1} PEpos=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡sin(ω0⋅pos)cos(ω0⋅pos)sin(ω1⋅pos)cos(ω1⋅pos)⋮sin(ωdmodel /2−1⋅pos)cos(ωdmodel /2−1⋅pos)⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤dmodel ×1
论文说,频率沿着向量维度递减,波长 1000 0 2 k / d model 10000^{2 k / d_{\text {model }}} 100002k/dmodel 呈几何级数增长,从从 2 π 2 \pi 2π 增长到 10000 ⋅ 2 π 10000 \cdot 2 \pi 10000⋅2π(不过我算着是到约 9646.61612 ⋅ 2 π 9646.61612\cdot 2 \pi 9646.61612⋅2π) 。
P E → p o s = [ sin ( p o s / 1000 0 2 × 0 512 ) cos ( p o s / 1000 0 2 × 0 512 ) ⋮ sin ( p o s / 1000 0 2 × 255 512 ) cos ( p o s / 1000 0 2 × 255 512 ) ] d model × 1 ≈ [ sin ( p o s ) cos ( p o s ) ⋮ sin ( 9646.61612 ⋅ p o s ) cos ( 9646.61612 ⋅ p o s ) ] d model × 1 \overrightarrow{PE}_{pos}=\left[\begin{array}{c} \sin \left(pos / 10000^{2 \times \frac{0}{512}}\right) \\ \cos \left(pos / 10000^{2 \times \frac{0}{512}}\right) \\ \vdots \\ \sin \left(pos / 10000^{2 \times \frac{255}{512}}\right)\\ \cos \left(pos / 10000^{2 \times \frac{255}{512}}\right) \end{array}\right]_{d_{\text {model }} \times 1} \approx \left[\begin{array}{c} \sin \left(pos\right) \\ \cos \left(pos\right) \\ \vdots \\ \sin \left(9646.61612 \cdot pos \right)\\ \cos \left(9646.61612 \cdot pos\right) \end{array}\right]_{d_{\text {model }} \times 1} PEpos=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡sin(pos/100002×5120)cos(pos/100002×5120)⋮sin(pos/100002×512255)cos(pos/100002×512255)⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤dmodel ×1≈⎣⎢⎢⎢⎢⎢⎡sin(pos)cos(pos)⋮sin(9646.61612⋅pos)cos(9646.61612⋅pos)⎦⎥⎥⎥⎥⎥⎤dmodel ×1
不过这样定义positional encoding,仍会陷入循环, 这里人为地将最大不重复序列长度限制为 512。例如,在 BERT 中就是这样做的(尽管值得一提的是他们使用了学习位置嵌入,但那是另一回事了)。 如果不这样做,模型确实无法区分序列中的第一个token和第513个token的位置编码。
四、为什么公式可以体现出相对次序关系?
1.相对次序关系怎么表示?
论文原文:
We chose this function because we hypothesized it would allow the model to easily learn to attend by relative positions, since for any fixed offset k, PEpos+k can be represented as a linear function of PEpos.
如果说Positional Encoding向量可以表示相对次序关系,那么 P E → p o s \overrightarrow{PE}_{pos} PEpos 应该满足 P E → p o s + k \overrightarrow{PE}_{pos+k} PEpos+k 是 P E → p o s \overrightarrow{PE}_{pos} PEpos 的线性变换,即:
对于任意固定的偏移量 k k k,存在线性变换 T ( k ) ∈ R d model × d model \boldsymbol{T}^{(k)} \in \mathbb{R}^{d_{\text {model }} \times d_{\text {model }}} T(k)∈Rdmodel ×dmodel ,使得
T ( k ) ⋅ P E → p o s = P E → p o s + k \boldsymbol{T}^{(k)} \cdot\overrightarrow{PE}_{pos} = \overrightarrow{PE}_{pos+k} T(k)⋅PEpos=PEpos+k
这一等式对于序列中任何有效位置 t ∈ { 0 , 1 , … , n − k − 1 } t\in\left\{0,1,\dots,n-k-1\right\} t∈{0,1,…,n−k−1} 的任何位置偏移 k ∈ { 1 , … , n } k\in\left\{1,\dots,n\right\} k∈{1,…,n} 成立。
为什么满足这个公式,Positional Encoding向量就可以表示相对次序?
这里就谈到了对线性变换的理解,矩阵对向量的线性变换,其实是施加在其基底上的变换,而新的向量是关于新的基底的线性组合,与原来的向量关于原来的基底的线性组合,是一样的。是不是就可以对应上:新的向量 P E → p o s + k \overrightarrow{PE}_{pos+k} PEpos+k 是关于新的基底的线性组合,与原来的向量 P E → p o s \overrightarrow{PE}_{pos} PEpos 关于原来的基底的线性组合,是一样的。也就是说,他们之间的线性变换不受这个位置为 p o s pos pos 的token在序列中的绝对位置的影响,这个线性变换矩阵 T ( k ) \boldsymbol{T}^{(k)} T(k) 可以表示出了不同距离的token的相对关系。
更多关于线性变换的直观理解:https://blog.csdn.net/xiaoyink/article/details/90705106
2.那论文公式满足这个相对次序关系的表示吗?
要使 T ( k ) ⋅ P E → p o s = P E → p o s + k \boldsymbol{T}^{(k)} \cdot\overrightarrow{PE}_{pos} = \overrightarrow{PE}_{pos+k} T(k)⋅PEpos=PEpos+k,需要使 T ( k ) \boldsymbol{T}^{(k)} T(k)不依赖于 p o s pos pos。
证明:
设 T ( k ) \boldsymbol{T}^{(k)} T(k) 是一个 2 × 2 2 \times 2 2×2矩阵, T ( k ) = [ u 1 v 1 u 2 v 2 ] \boldsymbol{T}^{(k)} = \begin{bmatrix} u_1 & v_1 \\ u_2 & v_2 \end{bmatrix} T(k)=[u1u2v1v2],
则 T ( k ) ⋅ P E → p o s = P E → p o s + k \boldsymbol{T}^{(k)} \cdot\overrightarrow{PE}_{pos} = \overrightarrow{PE}_{pos+k} T(k)⋅PEpos=PEpos+k可写作:
[ u 1 v 1 u 2 v 2 ] . [ sin ( ω k ⋅ p o s ) cos ( ω k ⋅ p o s ) ] = [ sin ( ω k ⋅ ( p o s + ϕ ) ) cos ( ω k ⋅ ( p o s + ϕ ) ) ] % [u1u2v1v2].[sin(ωk⋅pos)cos(ωk⋅pos)]=[sin(ωk⋅(pos+ϕ))cos(ωk⋅(pos+ϕ))]
等式右边使用三角函数正余弦公式,可化为:
[ u 1 v 1 u 2 v 2 ] . [ sin ( ω k ⋅ p o s ) cos ( ω k ⋅ p o s ) ] = [ sin ( ω k ⋅ p o s ) cos ( ω k ⋅ ϕ ) + cos ( ω k ⋅ p o s ) sin ( ω k ⋅ ϕ ) cos ( ω k ⋅ p o s ) cos ( ω k ⋅ ϕ ) − sin ( ω k ⋅ p o s ) sin ( ω k ⋅ ϕ ) ] % [u1u2v1v2].[sin(ωk⋅pos)cos(ωk⋅pos)]=[sin(ωk⋅pos)cos(ωk⋅ϕ)+cos(ωk⋅pos)sin(ωk⋅ϕ)cos(ωk⋅pos)cos(ωk⋅ϕ)−sin(ωk⋅pos)sin(ωk⋅ϕ)]
可以得到以下两个等式:
u 1 sin ( ω k ⋅ p o s ) + v 1 cos ( ω k ⋅ p o s ) = cos ( ω k ⋅ ϕ ) sin ( ω k ⋅ p o s ) + sin ( ω k ⋅ ϕ ) cos ( ω k ⋅ p o s ) u 2 sin ( ω k ⋅ p o s ) + v 2 cos ( ω k ⋅ p o s ) = − sin ( ω k ⋅ ϕ ) sin ( ω k ⋅ p o s ) + cos ( ω k ⋅ ϕ ) cos ( ω k ⋅ p o s ) u_1 \sin(\omega_k \cdot pos) + v_1 \cos(\omega_k \cdot pos) = \ \ \ \ \cos(\omega_k \cdot\phi)\sin(\omega_k \cdot pos) + \sin(\omega_k \cdot\phi)\cos(\omega_k \cdot pos) \\ u_2 \sin(\omega_k \cdot pos) + v_2 \cos(\omega_k \cdot pos) = - \sin(\omega_k \cdot\phi)\sin(\omega_k \cdot pos) + \cos(\omega_k \cdot\phi)\cos(\omega_k \cdot pos) u1sin(ωk⋅pos)+v1cos(ωk⋅pos)= cos(ωk⋅ϕ)sin(ωk⋅pos)+sin(ωk⋅ϕ)cos(ωk⋅pos)u2sin(ωk⋅pos)+v2cos(ωk⋅pos)=−sin(ωk⋅ϕ)sin(ωk⋅pos)+cos(ωk⋅ϕ)cos(ωk⋅pos)
求解上述方程,得到:
T ϕ , k = [ cos ( ω k . ϕ ) sin ( ω k . ϕ ) − sin ( ω k . ϕ ) cos ( ω k . ϕ ) ] T_{\phi,k} = \begin{bmatrix} \ \ \ \ \cos(\omega_k .\phi) & \sin(\omega_k .\phi) \\ - \sin(\omega_k . \phi) & \cos(\omega_k .\phi) \end{bmatrix} Tϕ,k=[ cos(ωk.ϕ)−sin(ωk.ϕ)sin(ωk.ϕ)cos(ωk.ϕ)]
即 T ( k ) \boldsymbol{T}^{(k)} T(k) 不依赖于 p o s pos pos。
而且可以发现, T ( k ) \boldsymbol{T}^{(k)} T(k) 跟旋转矩阵很相似。