自动驾驶感知——红外传感器
文章目录
- 1. 红外线基本概念
-
- 1.1 红外线探测的优缺点
- 1.2 红外线相关基础知识
- 1.3 红外辐射的基本知识
- 1.4 黑体、白体和透明体
- 1.5 相关物理定律
-
- 1.5.1 基尔霍夫定律
- 1.5.2 斯特藩-玻耳兹曼定律
- 1.5.3 维恩位移定律
- 2. 红外线传感器分类
-
- 2.1 主动式与被动式
- 2.2 光子式红外传感器
- 2.3 热释电式红外传感器
- 3. 红外线传感器相关技术与应用
-
- 3.1 红外夜视技术
-
- 3.1.1 主动式红外夜视技术(近红外区)
- 3.1.2 被动式红外夜视技术(中、远红外区)
- 3.2 红外双目立体视觉系统
- 3.3 行人检测
- 3.4 在自动驾驶中的应用
-
- 3.4.1 区分有无生命体征的物体
- 3.4.2 检测车辆的可驾驶区域
1. 红外线基本概念
1.1 红外线探测的优缺点

红外探测(IR detection)
❖ 利用仪器接收被探测物发出或者反射的红外线,从而掌握被
测物体所处位置的技术。
❖ 优点:
- 环境适应性好、隐蔽性好、抗干扰能力强、识别伪装目标
- 设备体积小、重量轻、功耗低
- 弥补其他传感器的不足,在无人系统中占据重要地位,
❖ 缺点:
- 价格昂贵,未大量投人使用。
1.2 红外线相关基础知识
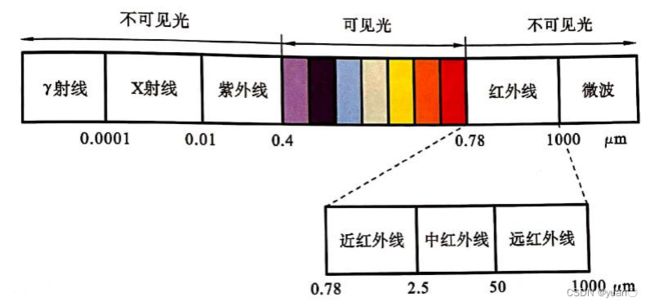
红外线是太阳光谱的一部分,具有光热效应,辐射热烈,红外区是光谱中最大的光热效应区。红外线是一种不可见光,具有反射、折射、散射、干涉、吸收等性质,其在真空中的传播速度为3×108m/s。红外辐射的物理本质是热辐射,是由于物体内部分子的转动及振动产生。一个物体向外辐射的能量大部分是以红外线的形式存在。红外线的波长从0.76~1000μm。波长为8~14μm的红外线与人体的远红外线相近, 为“生命波”。
1.3 红外辐射的基本知识
❖ 红外辐射的物理本质是热辐射。一个炽热物体向外辐射的能量大部分是通过红外线辐射出来的。
❖ 自然界中的任何物体,只要温度在绝对零度(-273℃)以上,高于绝对零度的物质都可以产生红外线。
❖ 辐射的红外线波长跟物体温度有关。表面温度越高,辐射能量越强。
❖ 具有反射、 折射、干涉、吸收等特性, 它在真空中也以光速传播,具有明显的波粒二象性。穿透性不强。
1.4 黑体、白体和透明体
❖ 黑体:能全部吸收投射到其表面的红外辐射的物体。吸收率 α α α=1。
❖ 白体:能全部反射红外辐射的物体。漫反射的反射率 ρ ρ ρ=1。
❖ 透明体:全部透过红外辐射的物体。透过率 τ τ τ=1。
PS1:严格来讲,自然界并不存在黑体、镜体和透明体,绝大部分物体属于灰体,即能部分反射或吸收红外辐射的物体。
PS2:所谓黑体或白体,就物体表面能全部吸收或全部反射所投射的辐射能而言,因此黑体并不一定是黑色的,白体也并不一定是白色的。
1.5 相关物理定律
1.5.1 基尔霍夫定律
物体向周围辐射能量的同时,也吸收周围物体的辐射能。该定律指物体的辐射发射量 E r E_r Er和吸收率 α α α之比与物体的性质无关,总等于同一温度下绝对黑体的辐射能量。 E r = α E 0 {E_r} = \alpha {E_0} Er=αE0
E r E_r Er:物体在单位面积和单位时间内发射出来的辐射能;
α α α :物体对辐射能的吸收系数;
E 0 E_0 E0 :等价于黑体在相同温度时辐射的能量,为常数;
1.5.2 斯特藩-玻耳兹曼定律
物体红外辐射的能量与它自身的绝对温度T的四次方成正比,并与 ε ε ε成正比。物体温度越高辐射能量越大。 E = σ ε T 4 E = \sigma \varepsilon {T^4} E=σεT4
E E E:物体在温度 T T T时单位面积和时间的红外辐射总能量。
σ σ σ:斯特藩-波尔兹曼常数,5.6697×10-12w/cm2k4。
ε ε ε:辐射比率,即物体表面辐射与黑体辐射本领之比。
T T T:物体的绝对温度。
1.5.3 维恩位移定律
❖ 物体热辐射的能量包括各种波长的电磁波。
❖ 物体的峰值辐射波长 λ m \lambda_m λm与物体自身的绝对温度 T T T成反比 λ m = 2897 T ( μ m ) {\lambda _m} = \frac{{2897}}{T}(\mu m) λm=T2897(μm)
- 人体的正常体温为36~37.50C ,即309~310.5K
- 辐射最强红外线波长为:λm=2897/(309~310.5) =9.67 ~ 9.64um,即:中心波长为9.65um。
2. 红外线传感器分类
将红外辐射能量的变化转换为电量变化的一种传感器,也成为红外探测器。它是红外探测系统的核心,它的性能好坏,将直接影响系统性能的优劣。按探测机理的不同,红外传感器分为:
红外传感器有以下优势:
- 红外线不受周围可见光的影响, 可昼夜测量
- 由于待测对象发出红外线,因此不必另设光源
- 大气对某些特定波长的红外线 吸收少, 适用于遥感技术
2.1 主动式与被动式
主动式红外传感器
❖ 发射机发出一束经调制的红外光束,被红外接收机接收,从而形成一条红外光束组成的警戒线:
- 若遇到树叶、雨、小动物、雪、沙尘、雾遮挡,则不应报警;
- 若遇到人或相当体积的物品遮挡,则将发生报警。
❖ 采用一发一收,属于线形防范,从最初的单光束发展到多光束,还可以双发双收,最大限度降低误报率,增强该产品的稳定性、可靠性。
被动式红外传感器
❖ 靠探测人体发射的红外线工作,收集外界的红外辐射进而聚集到红外传感器上。
❖ 通常采用热释电元件,接收红外辐射,温度发生变化时,就会向外释放电荷。辐射敏感元件对波长为10μm左右的红外辐射必须非常敏感。
2.2 光子式红外传感器

基本原理:利用红外辐射的光子效应(光电效应)进行工作的传感器。
- 光子效应是 指当有红外线入射到某些半导体材料上时,红外辐射中的光子流与 半导体材料中的电子相互作用,改变了电子能量状态,引起各种电学现象。
主要特点
优点:灵敏度高、响应速度快,响应频率较高;
缺点:探测波段窄、多数需要冷却,低温条件下工作。
2.3 热释电式红外传感器

基本原理:利用红外辐射的热效应引起元件本身的温度变化来实现某些参数的检测的
- 热释电效应:某些绝缘物质受热时,随着温度的上升,在晶体 两端将会产生数量相等而符号相反的电荷。这种 由于热变化而产生的电极化现象。
主要特点
- 优点:可在室温下使用,灵敏度与波长无关,应用领域很广便
- 缺点:探测率、响应速度都不如光子式红外传感器。
3. 红外线传感器相关技术与应用
3.1 红外夜视技术
3.1.1 主动式红外夜视技术(近红外区)
❖ 定义:通过主动照射并利用目标反射红外源的红外光来实现观测的夜视技术,对应装备为主动式红外夜视仪。
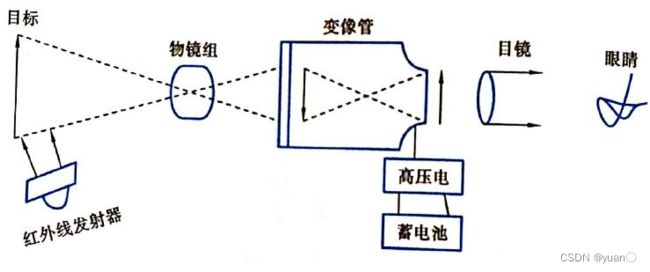
系统构成:由红外线发射器、变像管、电源以及光学系统构成
工作原理:发射器向前发射红外线,当前方有障碍物时,红外线碰触到障碍物便会被反射回来,然后经由物镜组落到变像管的光电发射体上,光电发射体吸收光子能量发射光电子,光电子经过变像管的加速、增强、成像处理后轰击到荧光屏上形成可见光图像。可见光图像经由目镜放大,观察到放大的图像。工作波长为800-1000nm的近红外区域。功率越大,系统作用距离越远。
3.1.2 被动式红外夜视技术(中、远红外区)
定义:借助于目标自身发射的红外辐射来实现观测的红外技术,根据目标与背景或目标各部分之间的温差或热辐射差来发现目标。
优点:可在雾、雨、雪天气工作,作用距离远,能识别伪装和抗干扰等,成为国外夜视装备发展重点。
工作原理:物体发出的红外辐射经由光学系统的光谱滤波和光学扫描后,在敏面上汇聚。水平扫描器和垂直扫描器对其扫描,形成的物体图像被探侧器逐点扫过,探测器将接收到的红外光信号转换成电压信号,再由放大器放大、由A/D转换器进行数模转换,形成图像信号在显示器上显示。

3.2 红外双目立体视觉系统
采用两个相机同时采集图像,通过两幅图像对应点的视差来计算点的三维坐标,实现目标的可靠定位,现有很多方案采用红外相机做双目立体视觉或者普通相机加上红外滤光片的方式代替红外相机实现特定红外光谱表示图像的采集。
红外双目立体视觉系统夜视基于视差获取视域空间内的三维信息,即由两个相机和前方物体构成一个三角形,已知两个相机之间的位置关系,通过相似三角形原理来获得两个相机公共视场内物体的深度数据、三维尺寸及空间物体特征点的三维坐标。
将红外热成像技术与双目立体视觉技术一体化融合,又可以实现透雾,透云,不受电磁干扰,无需任何辅助光源便可以进行全天时、全天候作业。此外,宽动态成像技术可以使红外热像仪能够在温度骤变的情况下实现成像自适应调节,保证视域内障碍物距离数据的实时抓取。

3.3 行人检测
使用两个不同的阈值获得将注意力集中在有高强度值的输人图像区域,如图(a)所示,该区域代表温暖的物体。应对像素值应用上阈值以除去冷或几乎不温暖的区域,选择非常温暖的物体对应的像素。
若像素以区域增长的方式与其他已经选择的像素邻接,选择具有高于下阈值的灰度级的像素。生成的图像仅包含呈现热点的温暖连续区域(暖区),如图(b)所示。

若想选择包含暖区的垂直条纹,则需在结果图像上计算逐列直方图。设置的自适应阈值是整个直方图的平均值的一部分,使用自适应阈值对直方图滤波。若多个热对象在图像中垂直对齐,它们的贡献在直方图中相加。
计算每个条带的灰度级的新方向直方图来区分哪里属于相同水平条纹的暖区。确定暖区后对行人可能位于的区域生成矩形边界框框架,如图(a)所示,再对边界框进行细化,即可准确地检测到行人,如图(b)所示。

3.4 在自动驾驶中的应用
3.4.1 区分有无生命体征的物体
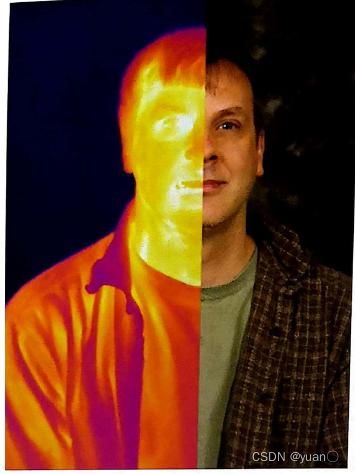
❖ 红外传感器和CMOS也可以结合使用以实现最佳的对象分类。由于它能评估物体的热特征,所以红外传感器是目前最容易立即区分活物体和非活物体的传感解决方案之一。
❖ 对于Level3级或更高级别的自主车辆,这是控制和决策的关键信息。对于非活体物体的一般检测,CMOS解决方案可以提供比远红外传感器更高的分辨率——但只能在良好的照明和天气条件下。
❖ 通过将来自CMOS解决方案的一般对象检测与来自远红外传感器的热信息相结合,汽车制造商能够更好地实现对场景中的全面理解。
3.4.2 检测车辆的可驾驶区域
❖ 远红外传感解决方案产生的路面图像变化较小,即道路的外观在所有环境条件下具有相似的特征。
❖ 远红外和CMOS传感解决方案的融合,可以为自主车辆提供更好的可驾驶区域检测系统,从而完成任何路径规划任务。
❖ 要使Level-3和更高的智能车辆进入汽车市场,必须具备卓越的检测能力和经济实惠的价格。
❖ OEM想将自动驾驶汽车推向大众,需要放弃目前的突兀设计。