07|声学回声消除AEC(1)
目录
一. 回声产生的原因
二. 回声消除的基本原理
参考信号:
回声路径的传递函数:
三. 自适应滤波器
3.1 自适应滤波器适用的场景:
3.2 解决方案:
3.3 维纳滤波:
单讲:
维纳解
3.3 迭代计算算法:
3.3.1 LMS:
3.3.2 NLMS:
四. 线性滤波器的挑战和解决办法
4.1 延迟估计
4.2 双讲检测
双讲:
问题场景:
解决方案:
例子:
4.3 非线性
问题场景:
解决方案:
五. 小结
流程图如下:
思考题:
一. 回声产生的原因
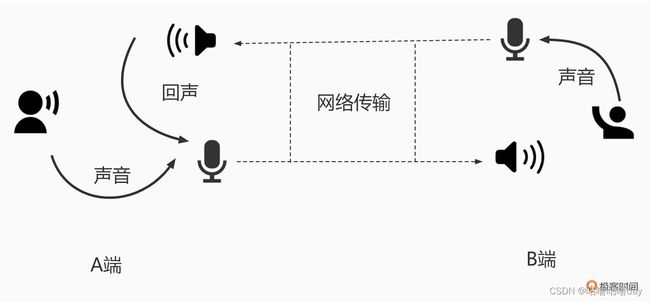
如上图,回声简单的描述即 A端的麦克风接收到A端扬声器播出的来自B端的信号,回传给了B端。
当A端麦克风将 A端的人声与 回声混在一起后会显著降低语音的可懂度。需要使用AEC将回声消除后,只保留A端的音源声音发给B端。
二. 回声消除的基本原理
参考信号:
在近端收到的远端的声音信号叫做参考信号。
回声路径的传递函数:
经过扬声器播放、空气传播、房间墙体反射、麦克风采集后,参考信号不可避免的产生很多变换。 这个变换用数学的方式来表达叫做回声路径的传递函数。
如上图,近端信号除了回声还有近端语音。 echo(n)表示回声,y(n)表示近端声音。
z(n)=echo(n)+y(n)
回声消除的目的是通过算法估计出回声路径的传递函数. f' 。如果估计的传递函数 f' 与真实的传递函数f是一致的。那么回声就可以完美消除了。
z’(n) = z(n) − f’(x(n)) 公式 3
z’(n) = f(x(n)) − f' (x(n)) + y(n) 公式 4
z’(n) 表示近端信号, f' (x(n))估计出的传递函数,f(x(n))为真实的传递函数。
三. 自适应滤波器
采用实时更新的滤波器系数来模拟真实场景的回声路径。(回声路径建模)
3.1 自适应滤波器适用的场景:
复杂的声学场景:
实际AEC要面临复杂的、时变的声学环境。比如
- 扬声器和麦克风说播放失真、采集失真会给声学信号带来很多非线性的变化。
- 设备、系统调度的不稳定性可能造成回声和远端接受信号的延迟抖动。
- 房间的混响、设备所处的位置的变化,都会带来回声路径的变化。
因此AEC必须快速的自适应算出这些回声路径的变化。如果估计不准,可能会导致回声泄漏或近端声音被压制,甚至造成丢字、卡顿等现象,严重影响实时音频互动的质量。
3.2 解决方案:
针对以上问题,经过半个多世纪的发展,摸索出一套以自适应滤波为基础的回声消除方法。
自适应滤波的核心思想:用实时更新的滤波器系数模拟真实场景的回声路径,然后结合远端信号估计出回声信号,再依从近端采集的混音信号去减去估计的回声,实现回声消除。
3.3 维纳滤波:
在一个相对稳定的声学环境中,回声路径中的延迟和房间的混响、音量的大小的变化等 都可以看作是对远端信号做的一系列线性变化。
这种线性变化可以用一个线性离散的FIR线性滤波器表示公式如下:

其中 wk 代表第 k 个滤波器系数。
单讲:
在近端只有回声信号没有近端信号,这种场景叫单讲。
回声信号的估计误差 e(n) 如下公式6:
e(n)=echo(n)−echo’(n) 公式 6
echo(n)表示原始的远端信号,echo’(n)表示对远端信号做的线性变化后的回声信号。
维纳解
维纳滤波就是以估计误差e(n) 的最小平方作为最优解的线性滤波器。(MSE)
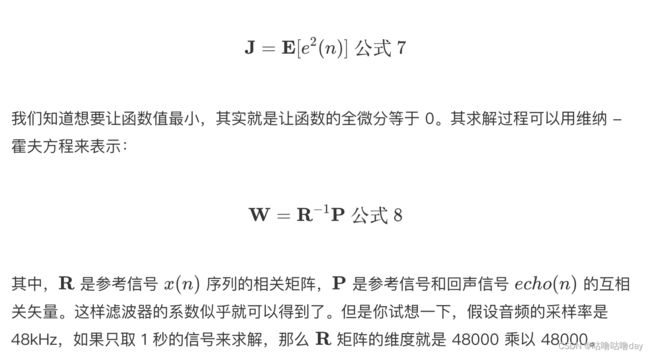
如上,实时求这么大的矩阵的逆矩阵,算力无法支持。 这种直接求得的解叫维纳解,是全剧最优解,但计算量过大。
自适应滤波器的核心思想是面对回声路径不断变化的场景,比如移动电话等时,可以使用梯度下降法跌代的计算滤波器系数。
3.3 迭代计算算法:
包括LMS、和NLMS算法
3.3.1 LMS:
最小均方算法LMS(Least Mean Square)最早提出,也是最基础的自适应滤波方法。
基本原理如下:

W(n) 代表第n次迭代时滤波器的系数向量,X(n)是第n次迭代的输入向量(远端信号),e(n)是第n次迭代的误差,u 是步长因子决定了滤波器系数的收敛速度,且u越大收敛越快。
梯度下降是SGD,不断逼近维纳解。 受输入向量(远端信号)X(n) 影响较大,如果远端信号音量小,从公式看到收敛速度会变很慢,反之梯度太大,会导致系数收敛过快。
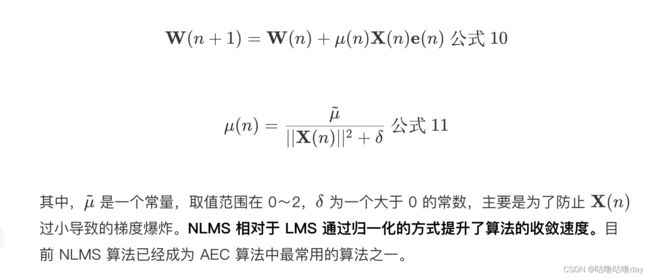
3.3.2 NLMS:
通过X(n)的大小来动态调节步长因子,可以把X(n)类似归一化操作,如下图:
四. 线性滤波器的挑战和解决办法
除了采用NLMS方法还要解决三个问题:
- 延迟估计
- 双讲检测
- 非线性
4.1 延迟估计
即回声延迟。
滤波器的感知长度:即X(n)输入信号的长度。
问题场景:
如果实际回声信号的传递路径过长,比如有很大的回声或混响,那么需要一个很长的X(n)作为输入才能估计回声信号的函数。 这会导致滤波器算力增加,难以实现实时性。
解决方案:
可以通过估计延迟来减少公式5中的算力需求,即减少计算Wk。
延迟估计的方法也比较简单,其实就是移动远端信号的起始位置,然后和回声信号计算互相关性,并找到互相关最大的位置。这个位置就是我们要的延迟。
4.2 双讲检测
双讲:
远端和近端都存在音频信号。
问题场景:
当双讲场景时, 由于NLMS是由于对回声信号进行估计的,若此时还用麦克风采集的信号作为回声信号,会导致滤波器无法收敛到正确位置,产生回声泄漏或近端语音受损。
解决方案:
先判断是单讲还是双讲;
检测方法是结合能量和远、近信号的相干性做一个判断。比如远端和近端能量都比较高但相干性不强,说明加入了近端声音,也就是双讲状态。
滤波器更新策略:
若为单讲,滤波器系数照常跌代更新;
若为双讲,调节步长因子或减缓滤波器的更新。
例子:
如果和对方打网络电话的时候,我们从一个房间走到另一个房间,比如从会议室走到走廊,对面反馈说听到了回声。这其实就和 AEC 的双讲时的策略有关,如果你和对端同时说话恰巧在此刻你换了个地方,也就是回声路径发生了改变。 但由于是双讲的状态,滤波器没有及时更新,这时候就会漏回声。所以双讲检测可以防止滤波器发散。 但这其实也并不是一个完美的解决方案,可能还会导致回声泄漏。只是这种双讲时,恰巧换房间的情况不是那么常见,所以双讲检测依然是回声策略中常见的调整依据。
4.3 非线性
问题场景:
LMS/NLMS算法实际上是估计一个线性的滤波器,无法模拟扬声器、麦克风可能导致的非线性的变换。 比如一些廉价的或声学特性较差的设备 导致的非线性失真较多,所以出现回声概率较大。
解决方案:
一般在线性回声处理后再集联一个非线性处理,来处理线性处理后的残留噪声。 同时非线性处理需要兼顾不同设备与环境,是一个很有挑战的事情。
另外出现不少基于机器学习的解决非线性的方案见下一讲。
五. 小结
由于采集和播放设备的耦合,在实时音频互动领域,回声消除是实时音频链路中重要的一环。常见回声消除流程:
- 双讲检测
- 延迟估计
- 线性回声消除
- 非线性回声消除
流程图如下:
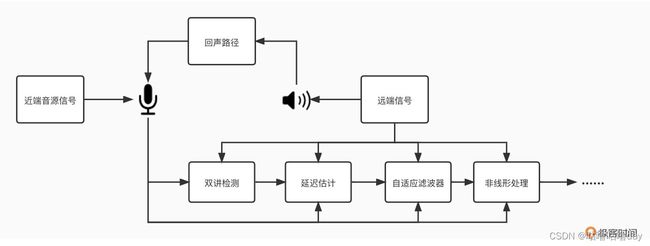
另外一般把回声消除模块放在音频采集模块后,再做降噪、增益等,也是为了避免音频处理对回声路径的复杂性的增加。
回声消除算法在已知一个音源信号的条件下,在多音源混合的音频中消除这一音源。 所以有的时候回声消除也被用来做一些音源分离的事情。比如一首歌你已经有伴奏的情况下,对人声和伴奏混合在一起的歌曲,用回声消除就可以提取到清唱(也就是没有伴奏的纯人声)。
思考题:
有的时候设备或者 App 在使用过程中还是会频繁地出现回声泄漏,但是带上耳机似乎大部分回声问题就可以解决,这背后的原理是什么呢?
答:带上耳机后, 扬声器不再发声。因而远端声音无法进入到麦克,采集的信号就不会存在远端的声音信息,因而没有回声。