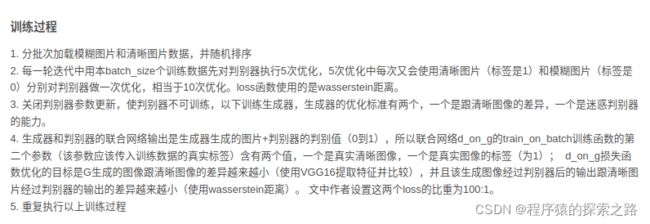
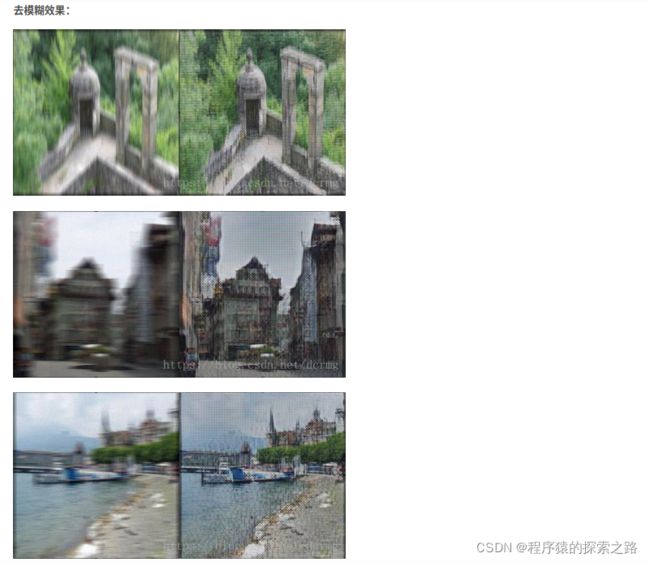
【笔记】生成对抗网络GAN 消除图像模糊(Keras):这个网络的网格应该消除不了,效果不是最优的,想消除网格可以使用其它更优的方法
2017年,乌克兰天主教大学、布拉格捷克理工大学和解决方案提供商Eleks联手公布了一篇论文,文章标题为《DeblurGAN: Blind Motion Deblurring Using Conditional Adversarial Networks》。
这篇文章中,研究人员提出一种基于条件对抗式生成网络和内容损失(content loss)的端对端学习法DeblurGAN,用来去除图像上因为相机和物体相对运动而产生的模糊。
论文地址:https://arxiv.org/abs/1711.07064
pytorch实现: https://github.com/KupynOrest/DeblurGAN
keras实现: https://github.com/RaphaelMeudec/deblur-gan


def generator_model():
inputs = Input(shape=image_shape)
x = ReflectionPadding2D((3, 3))(inputs)
x = Conv2D(filters=ngf, kernel_size=(7, 7), padding='valid')(x)
x = BatchNormalization()(x)
x = Activation('relu')(x)
n_downsampling = 2
for i in range(n_downsampling):
mult = 2**i
x = Conv2D(filters=ngf*mult*2, kernel_size=(3, 3), strides=2, padding='same')(x)
x = BatchNormalization()(x)
x = Activation('relu')(x)
mult = 2**n_downsampling
for i in range(n_blocks_gen):
x = res_block(x, ngf*mult, use_dropout=True)
for i in range(n_downsampling):
mult = 2**(n_downsampling - i)
x = Conv2DTranspose(filters=int(ngf * mult / 2), kernel_size=(3, 3), strides=2, padding='same')(x)
x = BatchNormalization()(x)
x = Activation('relu')(x)
x = ReflectionPadding2D((3, 3))(x)
x = Conv2D(filters=output_nc, kernel_size=(7, 7), padding='valid')(x)
x = Activation('tanh')(x)
x = Lambda(lambda z: z*2)(x)
outputs = Add()([x, inputs])
outputs = Lambda(lambda z: z/3)(outputs)
model = Model(inputs=inputs, outputs=outputs, name='Generator')
return model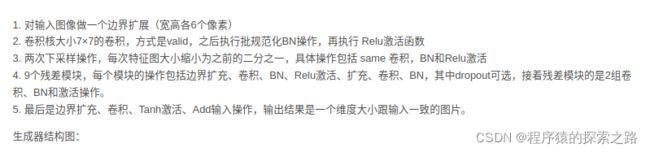

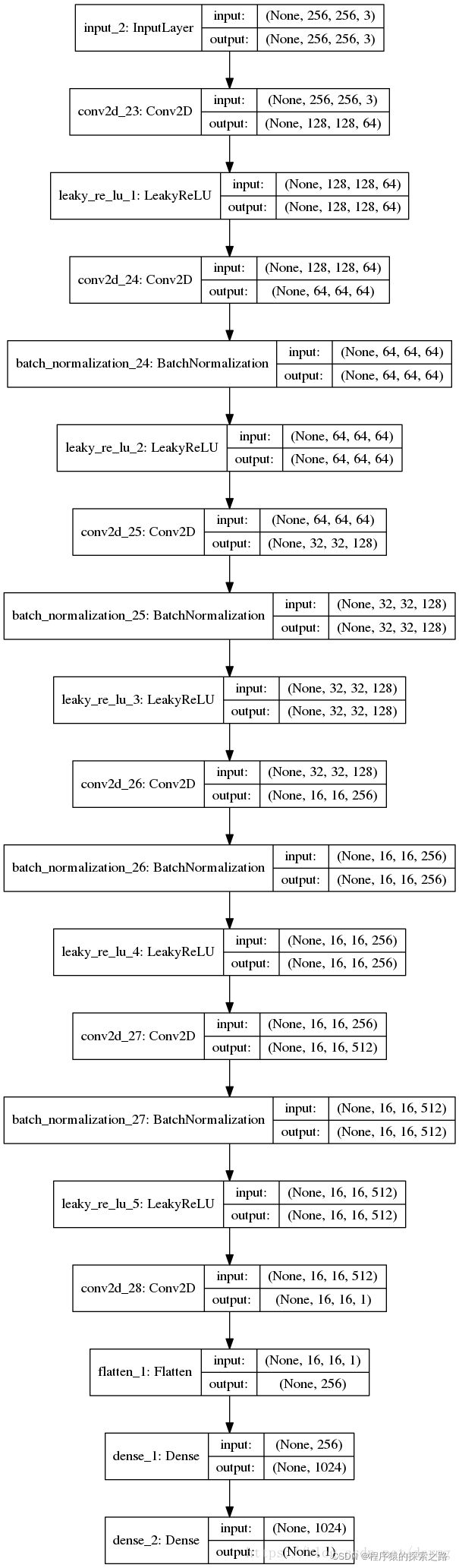
def discriminator_model():
"""Build discriminator architecture."""
n_layers, use_sigmoid = 3, False
inputs = Input(shape=input_shape_discriminator)
x = Conv2D(filters=ndf, kernel_size=(4, 4), strides=2, padding='same')(inputs)
x = LeakyReLU(0.2)(x)
nf_mult, nf_mult_prev = 1, 1
for n in range(n_layers):
nf_mult_prev, nf_mult = nf_mult, min(2**n, 8)
x = Conv2D(filters=ndf*nf_mult, kernel_size=(4, 4), strides=2, padding='same')(x)
x = BatchNormalization()(x)
x = LeakyReLU(0.2)(x)
nf_mult_prev, nf_mult = nf_mult, min(2**n_layers, 8)
x = Conv2D(filters=ndf*nf_mult, kernel_size=(4, 4), strides=1, padding='same')(x)
x = BatchNormalization()(x)
x = LeakyReLU(0.2)(x)
x = Conv2D(filters=1, kernel_size=(4, 4), strides=1, padding='same')(x)
if use_sigmoid:
x = Activation('sigmoid')(x)
x = Flatten()(x)
x = Dense(1024, activation='tanh')(x)
x = Dense(1, activation='sigmoid')(x)
model = Model(inputs=inputs, outputs=x, name='Discriminator')
return model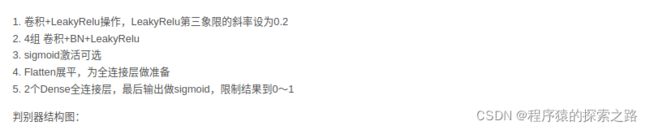

def perceptual_loss(y_true, y_pred):
vgg = VGG16(include_top=False, weights='imagenet', input_shape=image_shape)
loss_model = Model(inputs=vgg.input, outputs=vgg.get_layer('block3_conv3').output)
loss_model.trainable = False
return K.mean(K.square(loss_model(y_true) - loss_model(y_pred)))
def wasserstein_loss(y_true, y_pred):
return K.mean(y_true*y_pred)