GNSS-INS组合导航:KF-GINS(一)
因为毕业设计需求,最近一个月学习了开源程序KF-ginss。
这几篇文章介绍松组合导航是如何实现的,总体大概分为三部分、第一部分介绍常用的坐标系转换、大地测量学基础、角度转化,第二部分介绍组合导航、状态转移矩阵如何实现、怎样进行卡尔曼滤波更新、第三部分介绍捷联惯导部分。
Gi_engine_process.cpp文件
Cov_.resize(RANK, RANK);
Qc_.resize(NOISERANK, NOISERANK);
dx_.resize(RANK, 1);
Cov_.setZero();
Qc_.setZero();
dx_.setZero();
1、设置协方差矩阵,系统噪声阵和系统误差状态矩阵大小
假设有离散线性系统,k 时刻的系统状态Xk受系统噪声序列wk−1 驱动;系统状态方程及量测方
程均为系统状态量的线性方程:

wk 与vk 是互不相关的零均值白噪声序列:

Qk为状态噪声方差阵,Rk为量测噪声方差阵、
auto imunoise = options_.imunoise;
Qc_.block(ARW_ID, ARW_ID, 3, 3) = imunoise.gyr_arw.cwiseProduct(imunoise.gyr_arw).asDiagonal();
Qc_.block(VRW_ID, VRW_ID, 3, 3) = imunoise.acc_vrw.cwiseProduct(imunoise.acc_vrw).asDiagonal();
Qc_.block(BGSTD_ID, BGSTD_ID, 3, 3) =
2 / imunoise.corr_time * imunoise.gyrbias_std.cwiseProduct(imunoise.gyrbias_std).asDiagonal();
Qc_.block(BASTD_ID, BASTD_ID, 3, 3) =
2 / imunoise.corr_time * imunoise.accbias_std.cwiseProduct(imunoise.accbias_std).asDiagonal();
Qc_.block(SGSTD_ID, SGSTD_ID, 3, 3) =
2 / imunoise.corr_time * imunoise.gyrscale_std.cwiseProduct(imunoise.gyrscale_std).asDiagonal();
Qc_.block(SASTD_ID, SASTD_ID, 3, 3) =
2 / imunoise.corr_time * imunoise.accscale_std.cwiseProduct(imunoise.accscale_std).asDiagonal();2、初始化系统噪声阵:在噪声阵其实分为六个部分
陀螺和加速度计零偏及比例因子误差均建模为一阶高斯马尔可夫过程
initialize(options_.initstate, options_.initstate_std);设置系统状态(位置、速度、姿态和IMU误差)初值和初始协方差,
pvacur_.pos = initstate.pos;
pvacur_.vel = initstate.vel;
pvacur_.att.euler = initstate.euler;
pvacur_.att.cbn = Rotation::euler2matrix(pvacur_.att.euler);
pvacur_.att.qbn = Rotation::euler2quaternion(pvacur_.att.euler);初始化位置、速度、姿态
imuerror_ = initstate.imuerror;3、初始化IMU误差(IMU时间、补偿零偏误差、补偿比力因子误差)
因为设计到一些细节,最近没有太多时间整理,后续会进行详细的补充。
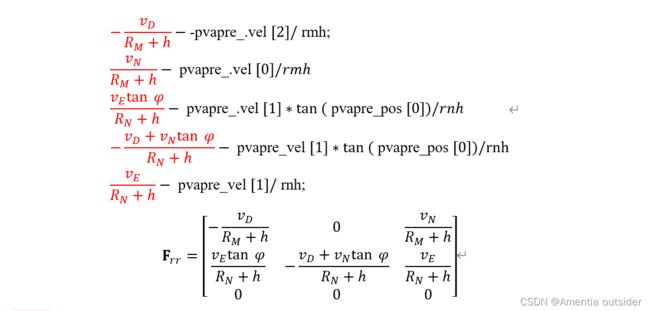
4、确定H矩阵(通过扰动误差,确定H阵;由于e系和n系误差扰动不同,对应的H阵也会有相应的变化,此程序采用N系)
位置误差
temp.setZero();
temp(0, 0) = -pvapre_.vel[2] / rmh;
temp(0, 2) = pvapre_.vel[0] / rmh;
temp(1, 0) = pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh;
temp(1, 1) = -(pvapre_.vel[2] + pvapre_.vel[0] * tan(pvapre_.pos[0])) / rnh;
temp(1, 2) = pvapre_.vel[1] / rnh;
F.block(P_ID, P_ID, 3, 3) = temp;
F.block(P_ID, V_ID, 3, 3) = Eigen::Matrix3d::Identity();
程序中:

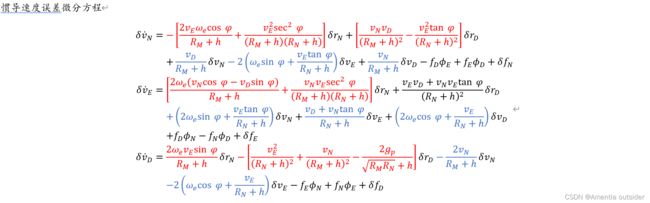
速度误差
temp.setZero();
temp(0, 0) = -2 * pvapre_.vel[1] * WGS84_WIE * cos(pvapre_.pos[0]) / rmh -
pow(pvapre_.vel[1], 2) / rmh / rnh / pow(cos(pvapre_.pos[0]), 2);
temp(0, 2) = pvapre_.vel[0] * pvapre_.vel[2] / rmh / rmh - pow(pvapre_.vel[1], 2) * tan(pvapre_.pos[0]) / rnh / rnh;
temp(1, 0) = 2 * WGS84_WIE * (pvapre_.vel[0] * cos(pvapre_.pos[0]) - pvapre_.vel[2] * sin(pvapre_.pos[0])) / rmh +
pvapre_.vel[0] * pvapre_.vel[1] / rmh / rnh / pow(cos(pvapre_.pos[0]), 2);
temp(1, 2) = (pvapre_.vel[1] * pvapre_.vel[2] + pvapre_.vel[0] * pvapre_.vel[1] * tan(pvapre_.pos[0])) / rnh / rnh;
temp(2, 0) = 2 * WGS84_WIE * pvapre_.vel[1] * sin(pvapre_.pos[0]) / rmh;
temp(2, 2) = -pow(pvapre_.vel[1], 2) / rnh / rnh - pow(pvapre_.vel[0], 2) / rmh / rmh +
2 * gravity / (sqrt(rmrn[0] * rmrn[1]) + pvapre_.pos[2]);
F.block(V_ID, P_ID, 3, 3) = temp;
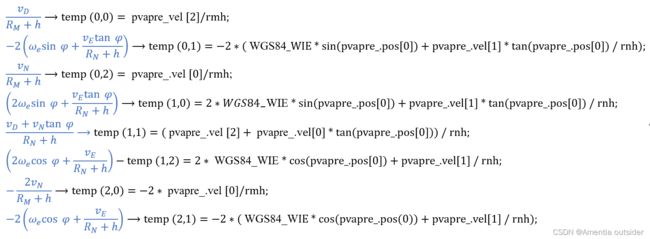
temp.setZero();
temp(0, 0) = pvapre_.vel[2] / rmh;
temp(0, 1) = -2 * (WGS84_WIE * sin(pvapre_.pos[0]) + pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh);
temp(0, 2) = pvapre_.vel[0] / rmh;
temp(1, 0) = 2 * WGS84_WIE * sin(pvapre_.pos[0]) + pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh;
temp(1, 1) = (pvapre_.vel[2] + pvapre_.vel[0] * tan(pvapre_.pos[0])) / rnh;
temp(1, 2) = 2 * WGS84_WIE * cos(pvapre_.pos[0]) + pvapre_.vel[1] / rnh;
temp(2, 0) = -2 * pvapre_.vel[0] / rmh;
temp(2, 1) = -2 * (WGS84_WIE * cos(pvapre_.pos(0)) + pvapre_.vel[1] / rnh);
F.block(V_ID, V_ID, 3, 3) = temp;
F.block(V_ID, PHI_ID, 3, 3) = Rotation::skewSymmetric(pvapre_.att.cbn * accel);
F.block(V_ID, BA_ID, 3, 3) = pvapre_.att.cbn;
F.block(V_ID, SA_ID, 3, 3) = pvapre_.att.cbn * (accel.asDiagonal());



姿态误差
temp.setZero();
temp(0, 0) = -WGS84_WIE * sin(pvapre_.pos[0]) / rmh;
temp(0, 2) = pvapre_.vel[1] / rnh / rnh;
temp(1, 2) = -pvapre_.vel[0] / rmh / rmh;
temp(2, 0) = -WGS84_WIE * cos(pvapre_.pos[0]) / rmh - pvapre_.vel[1] / rmh / rnh / pow(cos(pvapre_.pos[0]), 2);
temp(2, 2) = -pvapre_.vel[1] * tan(pvapre_.pos[0]) / rnh / rnh;
F.block(PHI_ID, P_ID, 3, 3) = temp;
temp.setZero();
temp(0, 1) = 1 / rnh;
temp(1, 0) = -1 / rmh;
temp(2, 1) = -tan(pvapre_.pos[0]) / rnh;
F.block(PHI_ID, V_ID, 3, 3) = temp;
F.block(PHI_ID, PHI_ID, 3, 3) = -Rotation::skewSymmetric(wie_n + wen_n);
F.block(PHI_ID, BG_ID, 3, 3) = -pvapre_.att.cbn;
F.block(PHI_ID, SG_ID, 3, 3) = -pvapre_.att.cbn * (omega.asDiagonal());




F.block(BG_ID, BG_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
F.block(BA_ID, BA_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
F.block(SG_ID, SG_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();
F.block(SA_ID, SA_ID, 3, 3) = -1 / options_.imunoise.corr_time * Eigen::Matrix3d::Identity();陀螺和加速度计零偏及比例因子误差均建模为一阶高斯马尔可夫过程

系统噪声驱动阵
G.block(V_ID, VRW_ID, 3, 3) = pvapre_.att.cbn;
G.block(PHI_ID, ARW_ID, 3, 3) = pvapre_.att.cbn;
G.block(BG_ID, BGSTD_ID, 3, 3) = Eigen::Matrix3d::Identity();
G.block(BA_ID, BASTD_ID, 3, 3) = Eigen::Matrix3d::Identity();
G.block(SG_ID, SGSTD_ID, 3, 3) = Eigen::Matrix3d::Identity();
G.block(SA_ID, SASTD_ID, 3, 3) = Eigen::Matrix3d::Identity();
状态转移矩阵
Phi.setIdentity();
Phi = Phi + F * imucur.dt;
计算系统传播噪声
Qd = G * Qc_ * G.transpose() * imucur.dt;
Qd = (Phi * Qd * Phi.transpose() + Qd) / 2;
5、EKF预测协方差和系统误差状态
EKFPredict(Phi, Qd);
}void GIEngineProcess::gnssUpdate(GNSS &gnssdata) {
// IMU位置转到GNSS天线相位中心位置
// convert IMU position to GNSS antenna phase center position
Eigen::Vector3d antenna_pos;
Eigen::Matrix3d Dr, Dr_inv;
Dr_inv = Earth::DRi(pvacur_.pos);
Dr = Earth::DR(pvacur_.pos);
antenna_pos = pvacur_.pos + Dr_inv * pvacur_.att.cbn * options_.antlever;关键技术:杆臂补偿

Eigen::MatrixXd dz;
dz = Dr * (antenna_pos - gnssdata.blh);确定新息,但是在紧张组合中新息将与惯导推算位置、电离层、对流层等有关,相比此时松组合更复杂

构造位置观测矩阵
Eigen::MatrixXd H_gnsspos;
H_gnsspos.resize(3, Cov_.rows());
H_gnsspos.setZero();
H_gnsspos.block(0, P_ID, 3, 3) = Eigen::Matrix3d::Identity();
H_gnsspos.block(0, PHI_ID, 3, 3) = Rotation::skewSymmetric(pvacur_.att.cbn * options_.antlever);
感谢武汉大学卫星导航定位技术研究中心多源智能导航实验室(i2Nav)牛小骥教授团队开源的KF-GINS软件平台