- C#调用OpenCvSharp实现图像的直方图均衡化
gc_2299
dotnet编程OpenCvSharp直方图均衡化
本文学习基于OpenCvSharp的直方图均衡化处理方式,并使用SkiaSharp绘制相关图形。直方图均衡化是一种图像处理方法,针对偏亮或偏暗的图像,通过调整图像的像素值来增强图像对比度,详细原理及介绍见参考文献1-4。 直方图均衡化第一步要将彩色图像转换为灰度图像,调用OpenCvSharp中的Cv2.CvtColor函数转换,主要代码及效果图如下所示:MatoriImage=Cv2.Im
- 深入了解OpenCVSharp中常见的图像处理功能
仰望大佬007
图像处理opencv计算机视觉c#
深入了解OpenCVSharp中常见的图像处理功能前言1.图像加载与保存2.图像基本操作3.图像滤波4.边缘检测5.图像分割6.特征检测与描述子7.目标识别与跟踪8.图像融合与拼接9.形状匹配与模板匹配10.颜色空间转换与直方图11.图像转换与绘制12.图像分类与机器学习13.高级图像处理算法14.GPU加速与并行计算前言OpenCVSharp是C#语言中用于图像处理和计算机视觉的开源库,它提供了
- C# OpenCvSharp DNN Low Light image Enhancement
天天代码码天天
C#人工智能实践dnn人工智能神经网络机器学习计算机视觉深度学习c#
目录介绍效果模型信息项目代码下载C#OpenCvSharpDNNLowLightimageEnhancement介绍github地址:https://github.com/zhenqifu/PairLIE效果模型信息ModelProperties-----------------------------------------------------------------------------
- C# OpenVINO 图片旋转角度检测
天天代码码天天
C#人工智能实践OpenVinoopenvino人工智能opencv目标检测机器学习深度学习神经网络
目录效果项目代码下载效果项目代码usingOpenCvSharp;usingSdcb.OpenVINO;usingSystem;usingSystem.Diagnostics;usingSystem.Drawing;usingSystem.Linq;usingSystem.Runtime.InteropServices;usingSystem.Security.Cryptography;using
- C# OpenCvSharp DNN 部署yolov4目标检测
乱蜂朝王
人工智能dnnYOLO目标检测opencv机器学习人工智能深度学习
目录效果项目代码下载效果项目代码usingOpenCvSharp;usingOpenCvSharp.Dnn;usingSystem;usingSystem.Collections.Generic;usingSystem.Drawing;usingSystem.IO;usingSystem.Linq;usingSystem.Windows.Forms;namespaceOpenCvSharp_DNN
- C#中使用OpenCvSharp4绘制直线、矩形、圆、文本
雪域迷影
OpenCVC#WinForm和WPF编程语言学习c#开发语言opencv
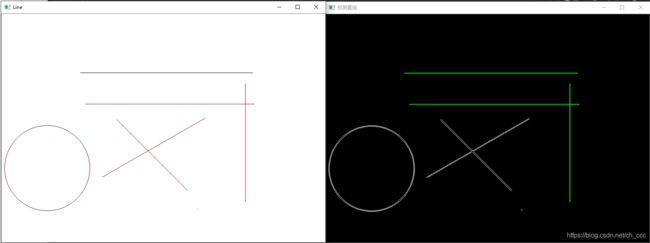
C#中使用OpenCvSharp4绘制直线、矩形、圆、文本继之前的Python中使用Opencv-python库绘制直线、矩形、圆、文本和VC++中使用OpenCV绘制直线、矩形、圆和文字,将之前的Python和C++示例代码翻译成C#语言,很简单,还是借用OpenCvSharp4库中的Line、Rectangle、Circle、PutText,值得一提的是https://github.com/o
- [C#][opencvsharp]winform实现自定义卷积核锐化和USM锐化
FL1623863129
C#计算机视觉人工智能
【锐化介绍】图像锐化(imagesharpening)是补偿图像的轮廓,增强图像的边缘及灰度跳变的部分,使图像变得清晰,分为空间域处理和频域处理两类。图像锐化是为了突出图像上地物的边缘、轮廓,或某些线性目标要素的特征。这种滤波方法提高了地物边缘与周围像元之间的反差,因此也被称为边缘增强。一、为什么要用USM锐化?上一篇讲拉普拉斯锐化,不能提供精细的调整,在photoshop中采用USM(Unsha
- Linux上使用OpenCvSharp
xdpcxq1029
linux运维服务器
前言OpenCV是一个基于Apache2.0许可(开源)发行的跨平台计算机视觉和机器学习软件库,它具有C++,Python,Java和MATLAB接口,并支持Windows,Linux,Android和MacOS。OpenCvSharp是一个OpenCV的.Netwrapper,应用最新的OpenCV库开发,使用习惯比EmguCV更接近原始的OpenCV,该库采用LGPL发行,对商业应用友好。1.
- 【OpenCV】在Linux上使用OpenCvSharp
椒颜皮皮虾྅
C#OpenCV技术分享opencvlinux人工智能
前言OpenCV是一个基于Apache2.0许可(开源)发行的跨平台计算机视觉和机器学习软件库,它具有C++,Python,Java和MATLAB接口,并支持Windows,Linux,Android和MacOS。OpenCvSharp是一个OpenCV的.Netwrapper,应用最新的OpenCV库开发,使用习惯比EmguCV更接近原始的OpenCV,该库采用LGPL发行,对商业应用友好。文章
- [opencvsharp]C#基于Fast算法实现角点检测
FL1623863129
C#算法
角点检测算法有很多,比如Harris角点检测、Shi-Tomas算法、sift算法、SURF算法、ORB算法、BRIEF算法、Fast算法等,今天我们使用C#的opencvsharp库实现Fast角点检测【算法介绍】fast算法Fast(全称Featuresfromacceleratedsegmenttest)是一种用于角点检测的算法,该算法的原理是取图像中检测点,以该点为圆心的周围邻域内像素点判
- [C#][opencvsharp]opencvsharp sift和surf特征点匹配
FL1623863129
C#人工智能机器学习算法
SIFT特征和SURF特征比较SIFT特征基本介绍SIFT(Scale-InvariantFeatureTransform)特征检测关键特征:建立尺度空间,寻找极值关键点定位(寻找关键点准确位置与删除弱边缘)关键点方向指定关键点描述子建立尺度空间,寻找极值工作原理构建图像高斯金字塔,求取DOG,发现最大与最小值在每一级构建的高斯金字塔,每一层根据sigma的值不同,可以分为几个待级,最少有4个。关
- C# OpenCvSharp DNN Gaze Estimation 视线估计
乱蜂朝王
人工智能c#dnn开发语言opencv目标检测人工智能机器学习
目录介绍效果模型信息项目代码frmMain.csGazeEstimation.cs下载C#OpenCvSharpDNNGazeEstimation介绍训练源码地址:https://github.com/deepinsight/insightface/tree/master/reconstruction/gaze效果模型信息Inputs-------------------------name:in
- C#使用OpenCvSharp4库读取本地视频
雪域迷影
C#WinForm和WPFOpenCV编程语言学习c#音视频开发语言
C#使用OpenCvSharp4库读取本地视频OpenCvSharp4库OpenCvSharp4库是一个基于.Net封装的OpenCV库,Github源代码地址为:https://github.com/shimat/opencvsharp,里面有关于Windows下安装OpenCvSharp4库的描述,如下图所示:视频资源地址视频资源可以到https://github.com/murtazahas
- C#使用OpenCvSharp4库中5个基础函数-灰度化、高斯模糊、Canny边缘检测、膨胀、腐蚀
雪域迷影
OpenCV编程语言学习C#WinForm和WPFc#开发语言opencv
C#使用OpenCvSharp4库中5个基础函数-灰度化、高斯模糊、Canny边缘检测、膨胀、腐蚀使用OpenCV可以对彩色原始图像进行基本的处理,涉及到5个常用的处理:灰度化模糊处理Canny边缘检测膨胀腐蚀1、测试图像lena.jpg本例中我们采用数字图像处理中经常用到的一副标准图像lena.png作为测试图像,如下图所示:具体资源下载地址为:lena图像下载地址2、使用VisualStudi
- 测试C#调用OpenCvSharp和IronOcr从摄像头中识别文字
gc_2299
dotnet编程OpenCvSharpIronOcr摄像头文字识别
学习了基于OpenCvSharp获取摄像头数据,同时学习了基于IronOcr的文字识别用法,将这两者结合即是从摄像头中识别文字。本文测试C#调用OpenCvSharp和IronOcr从摄像头中识别文字的基本用法、。 新版Winform项目,在Nuget包管理器中添加以下程序集:Hompus.VideoInputDevicesDirectShowLib.StandardOpenCvSharp4
- C#控制台应用把视频转为图片
布·丁
c#音视频开发语言
usingSystem;usingSystem.IO;usingOpenCvSharp;classProgram{staticvoidMain(string[]args){//视频文件路径stringvideoPath=@"I:\OpenCvSharp学习\cylindrical.avi";//输出图片的目录stringoutputFolder=@"I:\OpenCvSharp学习\output_
- 测试C#调用OpenCvSharp和ViewFaceCore从摄像头中识别人脸
gc_2299
dotnet编程c#OpenCvSharpViewFaceCore摄像头人脸识别
学习了基于OpenCvSharp获取摄像头数据,同时学习了基于ViewFaceCore的人脸识别用法,将这两者结合即是从摄像头中识别人脸。本文测试测试C#调用OpenCvSharp和ViewFaceCore从摄像头中识别人脸,并进行人脸红框标记。 新建Winform项目,在Nuget包管理器其中添加以下包:Hompus.VideoInputDevicesDirectShowLib.Stand
- OpenCvSharp 通道拆分、空间转换
C# 学习者
计算机视觉opencv人工智能
通道拆分、空间转换通道拆分//通道拆分(BGR)Mat[]BGR=Cv2.Split(src);//通道合并Matdst=newMat();Cv2.Merge(BGR,dst);空间转换//BGR转灰度图Matdst=newMat();Cv2.CvtColor(src,dst,ColorConversionCodes.BGR2GRAY);Cv2.ImShow("",dst);//BGR转HSVMa
- c#-OpenCvSharp-掩码操作(附源码)
亦陈不染
计算机视觉c#opencv
目录知识讲解:掩码:Mat.SetTo()Rect类:Mat.CopyTo()思路:源码(注释很详细,慢慢看):知识讲解:掩码:掩码(Mask)是一个与原始图像相同尺寸的矩阵,用于控制图像的处理。掩码中的每个像素值对应着原始图像中的一个像素位置,它可以取不同的像素值来表示不同的信息。在OpenCV中,掩码通常是一个单通道的图像,像素值的范围通常是0到255。掩码中的像素值决定了对应位置的像素是否参
- OpenCVSharp学习笔记4--矩阵的掩码操作(从崩溃到收获)
图南堂
OpenCVSharp学习opencvc#
本文是学习Maskoperationsonmatrices和矩阵的掩码操作过程中的笔记,原本只是想着理解原文,并将源码用C#和OpenCVSharp重新实现,可没想到在实现的过程中,却遇到了几个让自己怀疑人生的问题。(部分代码有Bug,复制需谨慎!)1、测试用例这里引用矩阵的掩码操作测试用例中的原文(有版权问题的话,请联系删除)思考一下图像对比度增强的问题。我们可以对图像的每个像素应用下面的公式上
- C# OpenCvSharp DNN FreeYOLO 人脸检测&人脸图像质量评估
乱蜂朝王
人工智能c#dnn开发语言
目录效果模型信息yolo_free_huge_widerface_192x320.onnxface-quality-assessment.onnx项目代码frmMain.csFreeYoloFaceFaceQualityAssessment.cs下载C#OpenCvSharpDNNFreeYOLO人脸检测&人脸图像质量评估效果模型信息yolo_free_huge_widerface_192x320
- C# OpenCvSharp DNN 部署yolov3目标检测
天天代码码天天
C#人工智能实践dnnYOLO目标检测人工智能c#神经网络opencv
目录效果yolov3.cfg项目代码下载C#OpenCvSharpDNN部署yolov3目标检测效果yolov3.cfg[net]#Testing#batch=1#subdivisions=1#Trainingbatch=16subdivisions=1width=416height=416channels=3momentum=0.9decay=0.0005angle=0saturation=1.
- c# 桌面录屏,生成视频方案总结
Paddy Pan
c#c#音视频opencv
目录介绍C#录屏思路常用实现方法OpencvSharp录屏介绍C#录屏思路录屏主要有摄像头录制,采集卡录制,桌面录制,麦克风录制,声卡录制等常用业务需求,主要开发思路1.通过一定帧频截图采集2.截图图片数据放入缓存3.通过缓存图像数据压缩,编码后生成对应的视频文件自行开发上面的流程复杂,可借助相关的组件来实现结果,如ffmpeg,opencv,及第三方公司组件ScnLib,Oraycn.MCapt
- Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现Mono12和Mono16位深度的图像保存(C++)
格林威
工业相机数码相机opencvc++计算机视觉人工智能
Baumer工业相机堡盟工业相机如何联合BGAPISDK和OpenCVSharp实现Mono12和Mono16位深度的图像保存(C#)Baumer工业相机Baumer工业相机保存位深度12/16位图像的技术背景代码案例分享1:引用合适的类文件2:NEOAPISDK联合OpenCV进行图像采集保存Mono12/16图像3:NEOAPISDK的图像联合OpenCV转换Mono12/16图像并保存工业相
- C# OpenCvSharp DNN 部署yoloX
天天代码码天天
C#人工智能实践dnn人工智能神经网络c#opencv计算机视觉目标检测
目录效果模型信息项目代码下载C#OpenCvSharpDNN部署yoloX效果模型信息Inputs-------------------------name:imagestensor:Float[1,3,640,640]---------------------------------------------------------------Outputs--------------------
- Baumer工业相机堡盟工业相机如何联合NEOAPI SDK和OpenCV实现Mono12和Mono16位深度的图像保存(C#)
格林威
工业相机数码相机c#开发语言opencv计算机视觉
Baumer工业相机堡盟工业相机如何联合BGAPISDK和OpenCVSharp实现Mono12和Mono16位深度的图像保存(C#)Baumer工业相机Baumer工业相机保存位深度12/16位图像的技术背景代码案例分享1:引用合适的类文件2:NEOAPISDK联合OpenCV进行图像采集保存Mono12/16图像3:NEOAPISDK的图像联合OpenCV转换Mono12/16图像并保存工业相
- C# OpenCvSharp DNN FreeYOLO 人脸检测&人脸图像质量评估
天天代码码天天
C#人工智能实践dnn人工智能神经网络YOLOc#计算机视觉opencv
目录效果模型信息yolo_free_huge_widerface_192x320.onnxface-quality-assessment.onnx项目代码frmMain.csFreeYoloFaceFaceQualityAssessment.cs下载C#OpenCvSharpDNNFreeYOLO人脸检测&人脸图像质量评估效果模型信息yolo_free_huge_widerface_192x320
- OpenCvSharp学习笔记13--使用InRange进行HSV阈值过滤、渐变色生成
图南堂
OpenCVSharp学习opencvc#图像处理
目标HSV色彩空间介绍使用InRange操作阈值基于HSV色彩空间的像素值范围检测对象生成渐变色HSV色彩空间HSV(Hue,Saturation,Value)是根据颜色的直观特性由A.R.Smith在1978年创建的一种颜色空间,也称六角锥体模型(HexconeModel)。HSV色系对用户来说是一种直观的颜色模型,对于颜色,人们直观的会问”什么颜色?深浅如何?明暗如何?“,而HSV色系则直观的
- C#&Opencvsharp4联合使用-入门及引用
SteveDraw
C#OpenCVc#OpenCVOpenCVSharp4计算机视觉编程
目录前言一,基础说明1.关于opencvsharp版本:2.关于库的选择3.关于库版本选择一致性二,基本使用1.库引用2.C#程序代码编写前言近在做CV,不断从halcon和OpenCV中切换,时间久了两个都挺陌生了,特别是使用opencvsharp方面,C#引用cv库有时都要查下资料,比较尴尬,特意做个笔记和经验分享给大家,希望能帮助到大家!!!本文主要针对的是C#与opencvshap联合入门
- [C#]winform使用纯opencvsharp部署yolox-onnx模型
FL1623863129
C#c#开发语言
【官方框架地址】https://github.com/Megvii-BaseDetection/YOLOX【算法介绍】YOLOX是一个高性能的目标检测算法,它是基于YOLO(YouOnlyLookOnce)系列算法的AnchorFree版本。YOLOX由MegviiTechnology的研究团队开发,并在2021年推出。该算法在保持YOLO系列原有速度与精度优势的同时,引入了新的改进和创新点,使得
- scala的option和some
矮蛋蛋
编程scala
原文地址:
http://blog.sina.com.cn/s/blog_68af3f090100qkt8.html
对于学习 Scala 的 Java™ 开发人员来说,对象是一个比较自然、简单的入口点。在 本系列 前几期文章中,我介绍了 Scala 中一些面向对象的编程方法,这些方法实际上与 Java 编程的区别不是很大。我还向您展示了 Scala 如何重新应用传统的面向对象概念,找到其缺点
- NullPointerException
Cb123456
androidBaseAdapter
java.lang.NullPointerException: Attempt to invoke virtual method 'int android.view.View.getImportantForAccessibility()' on a null object reference
出现以上异常.然后就在baidu上
- PHP使用文件和目录
天子之骄
php文件和目录读取和写入php验证文件php锁定文件
PHP使用文件和目录
1.使用include()包含文件
(1):使用include()从一个被包含文档返回一个值
(2):在控制结构中使用include()
include_once()函数需要一个包含文件的路径,此外,第一次调用它的情况和include()一样,如果在脚本执行中再次对同一个文件调用,那么这个文件不会再次包含。
在php.ini文件中设置
- SQL SELECT DISTINCT 语句
何必如此
sql
SELECT DISTINCT 语句用于返回唯一不同的值。
SQL SELECT DISTINCT 语句
在表中,一个列可能会包含多个重复值,有时您也许希望仅仅列出不同(distinct)的值。
DISTINCT 关键词用于返回唯一不同的值。
SQL SELECT DISTINCT 语法
SELECT DISTINCT column_name,column_name
F
- java冒泡排序
3213213333332132
java冒泡排序
package com.algorithm;
/**
* @Description 冒泡
* @author FuJianyong
* 2015-1-22上午09:58:39
*/
public class MaoPao {
public static void main(String[] args) {
int[] mao = {17,50,26,18,9,10
- struts2.18 +json,struts2-json-plugin-2.1.8.1.jar配置及问题!
7454103
DAOspringAjaxjsonqq
struts2.18 出来有段时间了! (貌似是 稳定版)
闲时研究下下! 貌似 sruts2 搭配 json 做 ajax 很吃香!
实践了下下! 不当之处请绕过! 呵呵
网上一大堆 struts2+json 不过大多的json 插件 都是 jsonplugin.34.jar
strut
- struts2 数据标签说明
darkranger
jspbeanstrutsservletScheme
数据标签主要用于提供各种数据访问相关的功能,包括显示一个Action里的属性,以及生成国际化输出等功能
数据标签主要包括:
action :该标签用于在JSP页面中直接调用一个Action,通过指定executeResult参数,还可将该Action的处理结果包含到本页面来。
bean :该标签用于创建一个javabean实例。如果指定了id属性,则可以将创建的javabean实例放入Sta
- 链表.简单的链表节点构建
aijuans
编程技巧
/*编程环境WIN-TC*/ #include "stdio.h" #include "conio.h"
#define NODE(name, key_word, help) \ Node name[1]={{NULL, NULL, NULL, key_word, help}}
typedef struct node { &nbs
- tomcat下jndi的三种配置方式
avords
tomcat
jndi(Java Naming and Directory Interface,Java命名和目录接口)是一组在Java应用中访问命名和目录服务的API。命名服务将名称和对象联系起来,使得我们可以用名称
访问对象。目录服务是一种命名服务,在这种服务里,对象不但有名称,还有属性。
tomcat配置
- 关于敏捷的一些想法
houxinyou
敏捷
从网上看到这样一句话:“敏捷开发的最重要目标就是:满足用户多变的需求,说白了就是最大程度的让客户满意。”
感觉表达的不太清楚。
感觉容易被人误解的地方主要在“用户多变的需求”上。
第一种多变,实际上就是没有从根本上了解了用户的需求。用户的需求实际是稳定的,只是比较多,也比较混乱,用户一般只能了解自己的那一小部分,所以没有用户能清楚的表达出整体需求。而由于各种条件的,用户表达自己那一部分时也有
- 富养还是穷养,决定孩子的一生
bijian1013
教育人生
是什么决定孩子未来物质能否丰盛?为什么说寒门很难出贵子,三代才能出贵族?真的是父母必须有钱,才能大概率保证孩子未来富有吗?-----作者:@李雪爱与自由
事实并非由物质决定,而是由心灵决定。一朋友富有而且修养气质很好,兄弟姐妹也都如此。她的童年时代,物质上大家都很贫乏,但妈妈总是保持生活中的美感,时不时给孩子们带回一些美好小玩意,从来不对孩子传递生活艰辛、金钱来之不易、要懂得珍惜
- oracle 日期时间格式转化
征客丶
oracle
oracle 系统时间有 SYSDATE 与 SYSTIMESTAMP;
SYSDATE:不支持毫秒,取的是系统时间;
SYSTIMESTAMP:支持毫秒,日期,时间是给时区转换的,秒和毫秒是取的系统的。
日期转字符窜:
一、不取毫秒:
TO_CHAR(SYSDATE, 'YYYY-MM-DD HH24:MI:SS')
简要说明,
YYYY 年
MM 月
- 【Scala六】分析Spark源代码总结的Scala语法四
bit1129
scala
1. apply语法
FileShuffleBlockManager中定义的类ShuffleFileGroup,定义:
private class ShuffleFileGroup(val shuffleId: Int, val fileId: Int, val files: Array[File]) {
...
def apply(bucketId
- Erlang中有意思的bug
bookjovi
erlang
代码中常有一些很搞笑的bug,如下面的一行代码被调用两次(Erlang beam)
commit f667e4a47b07b07ed035073b94d699ff5fe0ba9b
Author: Jovi Zhang <
[email protected]>
Date: Fri Dec 2 16:19:22 2011 +0100
erts:
- 移位打印10进制数转16进制-2008-08-18
ljy325
java基础
/**
* Description 移位打印10进制的16进制形式
* Creation Date 15-08-2008 9:00
* @author 卢俊宇
* @version 1.0
*
*/
public class PrintHex {
// 备选字符
static final char di
- 读《研磨设计模式》-代码笔记-组合模式
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
import java.util.ArrayList;
import java.util.List;
abstract class Component {
public abstract void printStruct(Str
- 利用cmd命令将.class文件打包成jar
chenyu19891124
cmdjar
cmd命令打jar是如下实现:
在运行里输入cmd,利用cmd命令进入到本地的工作盘符。(如我的是D盘下的文件有此路径 D:\workspace\prpall\WEB-INF\classes)
现在是想把D:\workspace\prpall\WEB-INF\classes路径下所有的文件打包成prpall.jar。然后继续如下操作:
cd D: 回车
cd workspace/prpal
- [原创]JWFD v0.96 工作流系统二次开发包 for Eclipse 简要说明
comsci
eclipse设计模式算法工作swing
JWFD v0.96 工作流系统二次开发包 for Eclipse 简要说明
&nb
- SecureCRT右键粘贴的设置
daizj
secureCRT右键粘贴
一般都习惯鼠标右键自动粘贴的功能,对于SecureCRT6.7.5 ,这个功能也已经是默认配置了。
老版本的SecureCRT其实也有这个功能,只是不是默认设置,很多人不知道罢了。
菜单:
Options->Global Options ...->Terminal
右边有个Mouse的选项块。
Copy on Select
Paste on Right/Middle
- Linux 软链接和硬链接
dongwei_6688
linux
1.Linux链接概念Linux链接分两种,一种被称为硬链接(Hard Link),另一种被称为符号链接(Symbolic Link)。默认情况下,ln命令产生硬链接。
【硬连接】硬连接指通过索引节点来进行连接。在Linux的文件系统中,保存在磁盘分区中的文件不管是什么类型都给它分配一个编号,称为索引节点号(Inode Index)。在Linux中,多个文件名指向同一索引节点是存在的。一般这种连
- DIV底部自适应
dcj3sjt126com
JavaScript
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/1999/xhtml&q
- Centos6.5使用yum安装mysql——快速上手必备
dcj3sjt126com
mysql
第1步、yum安装mysql
[root@stonex ~]# yum -y install mysql-server
安装结果:
Installed:
mysql-server.x86_64 0:5.1.73-3.el6_5 &nb
- 如何调试JDK源码
frank1234
jdk
相信各位小伙伴们跟我一样,想通过JDK源码来学习Java,比如collections包,java.util.concurrent包。
可惜的是sun提供的jdk并不能查看运行中的局部变量,需要重新编译一下rt.jar。
下面是编译jdk的具体步骤:
1.把C:\java\jdk1.6.0_26\sr
- Maximal Rectangle
hcx2013
max
Given a 2D binary matrix filled with 0's and 1's, find the largest rectangle containing all ones and return its area.
public class Solution {
public int maximalRectangle(char[][] matrix)
- Spring MVC测试框架详解——服务端测试
jinnianshilongnian
spring mvc test
随着RESTful Web Service的流行,测试对外的Service是否满足期望也变的必要的。从Spring 3.2开始Spring了Spring Web测试框架,如果版本低于3.2,请使用spring-test-mvc项目(合并到spring3.2中了)。
Spring MVC测试框架提供了对服务器端和客户端(基于RestTemplate的客户端)提供了支持。
&nbs
- Linux64位操作系统(CentOS6.6)上如何编译hadoop2.4.0
liyong0802
hadoop
一、准备编译软件
1.在官网下载jdk1.7、maven3.2.1、ant1.9.4,解压设置好环境变量就可以用。
环境变量设置如下:
(1)执行vim /etc/profile
(2)在文件尾部加入:
export JAVA_HOME=/home/spark/jdk1.7
export MAVEN_HOME=/ho
- StatusBar 字体白色
pangyulei
status
[[UIApplication sharedApplication] setStatusBarStyle:UIStatusBarStyleLightContent];
/*you'll also need to set UIViewControllerBasedStatusBarAppearance to NO in the plist file if you use this method
- 如何分析Java虚拟机死锁
sesame
javathreadoracle虚拟机jdbc
英文资料:
Thread Dump and Concurrency Locks
Thread dumps are very useful for diagnosing synchronization related problems such as deadlocks on object monitors. Ctrl-\ on Solaris/Linux or Ctrl-B
- 位运算简介及实用技巧(一):基础篇
tw_wangzhengquan
位运算
http://www.matrix67.com/blog/archives/263
去年年底写的关于位运算的日志是这个Blog里少数大受欢迎的文章之一,很多人都希望我能不断完善那篇文章。后来我看到了不少其它的资料,学习到了更多关于位运算的知识,有了重新整理位运算技巧的想法。从今天起我就开始写这一系列位运算讲解文章,与其说是原来那篇文章的follow-up,不如说是一个r
- jsearch的索引文件结构
yangshangchuan
搜索引擎jsearch全文检索信息检索word分词
jsearch是一个高性能的全文检索工具包,基于倒排索引,基于java8,类似于lucene,但更轻量级。
jsearch的索引文件结构定义如下:
1、一个词的索引由=分割的三部分组成: 第一部分是词 第二部分是这个词在多少