Opencv中的Filter2D过滤器
文章目录
-
- 1.低通滤波与高通滤波
- 2.函数及相关知识点解释
- 3.代码实战
-
- (1)模糊
- (2)Sobel算子(索贝尔)
- (3)浮雕(emboss)
- (4)大纲(outline)
- (5)锐化
- (6)拉普拉斯算子(laplacian operator)
- (7)分身:就是原图
1.低通滤波与高通滤波
低通滤波:可以去除噪声或平滑图像;
高通滤波:可以帮助查找图像的边缘;
2.函数及相关知识点解释
filter2D(src, ddepth, kernel, dst=None, anchor=None, delta=None, borderType=None)
Stc: 输入的原图像;
Ddepth: 表示目标图像的深度,默认是原来的图像深度相同,即-1;
Dst: 表示输出的目标图像;
Kernel:表示卷积核,一个单通道的浮点型矩阵;如果想在不同的通道使用不同的kernel,可以先使用split()函数将图像通道分开;
Anchor:内核基准点,默认值为(-1,-1),说明位于kernel的中心位置;类似于偏置。
Delta:表示在将过滤后的像素存储到dst之前,向其添加可选值;
BorderType:表示像素向外逼近的方法,默认值为BORDER_DEFAULT。

U(unsigned integer)表示的是无符号整数,S(signed integer)是有符号整数,F(float)是浮点数。
上面的:CV_8U:表示8位无符号整数


3.代码实战
实例代码:
import os
import cv2
import numpy as np
def Filter2D(img_path='images/lenna.jpg'):
img_src=cv2.imread(img_path)
img=cv2.resize(src=img_src,dsize=(512,512))
kernel=np.ones(
(5,5),np.float32
)/25
img=cv2.filter2D(img,-1,kernel=kernel)
cv2.imshow('img',img)
cv2.imshow('img_src',img_src)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
print('Pycharm')
Filter2D()
(1)模糊
:消除了相邻像素之间的差异

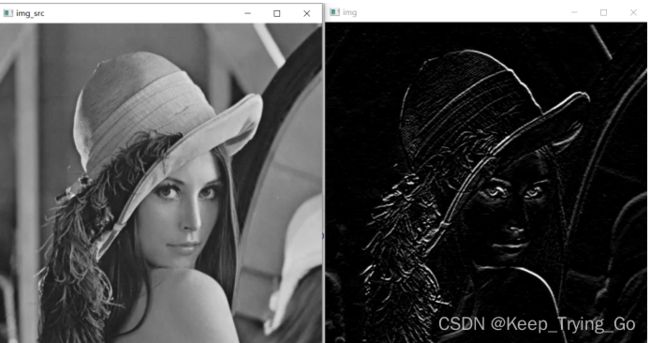
(2)Sobel算子(索贝尔)
:仅用于显示特定方向上相邻像素值的差异:left sobel,right sobel,top sobel,bottom sobel。

(3)浮雕(emboss)
:通过强调像素的差在给定方向的Givens深度错觉。

(4)大纲(outline)
:一个轮廓内核(也称为“边缘”的内核)用于突出显示的像素值大的差异。具有接近相同强度的相邻像素旁边的像素在新图像中将显示为黑色,而强烈不同的相邻像素相邻的像素将显示为白色。


(5)锐化
:强调在相邻的像素值的差异,使图片看起来更加的生动

(6)拉普拉斯算子(laplacian operator)
:用于边缘检测,对检测图中模糊的也起作用


(7)分身:就是原图

实时检测例子:
def detect_Filter2D(kernel):
cap=cv2.VideoCapture(0)
while cap.isOpened():
OK,frame=cap.read()
# 缩放图片的大小
img = cv2.resize(src=frame, dsize=(512, 512))
# 卷积操作
img = cv2.filter2D(img, -1, kernel=kernel)
cv2.imshow('img', img)
if cv2.waitKey(1)&0XFF==27:
break
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
print('Pycharm')
kernel=np.array((
[-1,-2,-1],
[0,0,0],
[1,2,1]),
dtype=np.float32
)
detect_Filter2D(kernel=kernel)

文章参考处:https://wenku.baidu.com/view/2e23fa6a2d3f5727a5e9856a561252d380eb206d.html
图像位深的解释:https://blog.csdn.net/qq_30460949/article/details/103456712