The AlphaGo Replication Wiki
摘自:https://github.com/Rochester-NRT/RocAlphaGo/wiki/01.-Home
Contents :
- Home
- 01. Home
- 02. Code
- 03. Data
- 04. Neural Networks and Training
- 05. Supervised Policy Network (Phase I)
- 06. Reinforcement Policy Network (Phase II)
- 07. Value Network (Phase III)
- 08. Running models with GTP
- 09. Tests and Benchmarks
- 10. MCTS
01. Home
Welcome to the AlphaGo Replication Wiki
Here you can learn more about how this project is structured, and a little about how DeepMind's AlphaGo itself works.
For details, see the list of pages in the sidebar on the right.
How AlphaGo Works
https://www.deepmind.com/alpha-go.html
DeepMind's AlphaGo is a combination of Monte Carlo Tree Search (MCTS) with Convolutional Neural Networks. There are three networks actively contributing to finding a move:
- the policy network guesses where an expert would play. Think of this network as memorizing patterns that it has seen others play but without any sense of the value of playing there.
- the value network estimates the probability of winning from the current position. It is perhaps analogous to an expert's 'intuition' of preferring one position to another.
- a second fast policy network that is used to simulate playouts to the end of the game. It is not a particularly strong player, but is orders of magnitude faster than the first policy network.
Together, these can be used to choose a move - by playing out a short series of reasonable moves then evaluating the results, then picking the best option. This is what AlphaGo's MCTS does - it simply follows the search tree in the most promising directions, where how 'promising' a branch is is a combination of expert policy and estimated value.
The fast policy network is not what you would think of as a typical neural network - it is more like multinomial logistic regression to choose the next move. This rollout policy is not nearly as good as the deeply-learned policy, but it is much much faster. Since the good policy function is so slow, it is only used to search ahead about 20 moves. Normally the value function alone could evaluate how good the board looks after those 20 moves, but AlphaGo's value function is augmented using this fast rollout all the way to the end of the game and simply seeing who wins.
The networks here aren't just processing stone positions or images of boards. A given board position is preprocessed into features that the neural network can make better use of. Part of the success of AlphaGo is attributable to carefully choosing which features to use. More complex features can be informative but at the expense of having to compute them for each position in the search tree.
The other big development contributing to AlphaGo's success is how these networks are trained using a combination of supervised and reinforcement learning.
02. Code
03. Data
04. Neural Networks and Training
The training pipeline
The neural networks behind AlphaGo's success are trained in a series of steps, partially described in the main body of the paper. To really understand the details, look at the paper's Methods section.
Phase 0: features
As briefly described on the home page, AlphaGo's neural networks are not processing raw board positions. Rather, they are directly being fed information like "if black plays here, how many white stones will be captured?" For a full list of features used for each network, see the Extended Data Tables in paper.
A potential take-away from this is that convolutional neural networks are very good at recognizing (and often generalizing from) spatial patterns, but they are not good at inferring arbitrary and complex rule-based relationships. Choosing which features to provide to the network is a balance of giving it good information to work with, while using features that are fast to compute and that are usable by a the network.
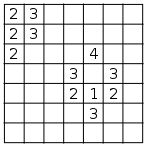
These features are encoded as "one-hot". Take the "liberties" feature for example, which simply counts the number of liberties the group a stone is connected to has. Instead of treating the number of liberties as a scalar value, the feature given to the network is an indicator bit in a binary vector, for example 10000000 if the group has one liberty, 00010000 if the group has 4 liberties, or 00000001 if the group has 8-or-more liberties. Take this miniature 7x7 board..

The number of liberties of the group connected to each stone is
There is a one-hot (i.e. indicator bit in a binary vector) encoding at each position, so we can visualize the resulting feature in 3D (cubes as 1s and empty space as 0s)
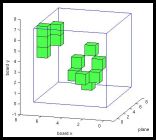
Note: in our code base, GameState objects know nothing about one-hot encoding. Converting from a GameState object to some NN inputs is handled by the Preprocessor class. The order of the dimensions of these features is batch x depth x width x height using the Theano convention. These dimensions would need to be permuted to use TensorFlow.
Feature conversion script
To see what arguments are available, use
python -m AlphaGo.preprocessing.game_converter --help
This script generates an HDF5 File with a states dataset, an actions dataset, and a file_offsetsgroup. The states dataset has size n_data x feature_planes x board_width x board_height, storing states converted to concatenated one-hot features at each board position. The actionsdataset has size n_data x 2 and simply stores the x,y coordinate of the move made from the corresponding state.
Typically all you do with this script is specify a list of SGF files and the particular set of features you want to process. SGF files may be specified as a directory walk, a flat lookup into a directory, or by stdin.
Example 1: convert all SGFs in the tests/ directory to all available features
python -m AlphaGo.preprocessing.game_converter --features all --directory tests --recurse -o debug_feature_planes.hdf5
Example 2: convert SGFs with 'Lee-Sedol' in the name, via stdin, to first 4 features planes
find tests -iname "*Lee-Sedol*.sgf" | python -m AlphaGo.preprocessing.game_converter --features board,ones,turns_since -o debug_feature_planes.hdf5
Phase 1: supervised learning of policy networks
Training begins by teaching a convolutional network to simply predict where an expert would move. See the data page regarding where 'expert' data comes from.
Each board position and its subsequent move from the database form a training pair. Additional pairs are constructed using rotations and reflections of the board. SGD and backpropagation are used to maximize the probability of selecting the given action.
DeepMind reported achieving 57% accuracy predicting moves in a test set after this phase (Silver et al. page 2).
Training of the fast rollout policy uses the same dataset and therefore will share much of the same training code. The features and configuration of this network are very different than those of the deep policy network.
Supervised training script
To see what arguments are available, use
python -m AlphaGo.training.supervised_policy_trainer --help
This script is given a model file (a json specifying the policy network's architecture) and a HDF5 file and calls Keras' fit_generator on data extracted by shuffling the given dataset. Each time this script is run, it should be pointed to a different 'output' directory. Metadata and model weights each epoch are saved in this directory.
The output directory will be populated with:
- metadata.json - a json file that keeps a record of which model is being trained, on what dataset, and the train/val accuracy on each epoch
- shuffle.npz - shuffling indices used to index into the dataset (which itself is in contiguous blocks of individual games). Training example
iisdataset[shuffle[i]] - weights.XXXXX.hdf5 - where
XXXXXis the epoch number starting from00000
To resume training from an earlier point, use the --weights weights.#####.hdf5 argument, where ##### refers the latest epoch (if you resume training from an earlier point, the metadata will be wrong). The script will look for weights in the same output directory, i.e. os.path.join(output_dir, weights_file).
A model spec must exist before running this script. This can be done as follows:
from AlphaGo.models.policy import CNNPolicy
arch = {'filters_per_layer': 128, 'layers': 12} # args to CNNPolicy.create_network() features = ['board', 'ones', 'turns_since'] # Important! This must match args to game_converter policy = CNNPolicy(features, **arch) policy.save_model('my_model.json')
Example 1: train on mini dataset created above and save results to training_results/
python -m AlphaGo.training.supervised_policy_trainer my_model.json debug_feature_planes.hdf5 training_results/ --epochs 5 --minibatch 32 --learning-rate 0.01
Phase 2: reinforcement learning, self-play
Reinforcement learning of a policy is difficult to do from scratch. The supervised learning phase is used to initialize the reinforcement learning phase, since greedily evaluating the policy from the first phase should yield reasonable moves.
The policy learned through supervised learning then plays against itself a few million times using decent-but-random moves. Every time it wins, its weights are adjusted to make selecting those same moves more likely. Every time it loses, its weights are adjusted in the opposite direction. Importantly, the network is not always playing against the best version of itself, but instead plays against a random past version of itself. This helps to ensure that it doesn't get stuck on a single type of strategy.
Phase 3: reinforcement learning, value networks
The value network is trained to guess the outcome of games played by the policy we get from phase 2. To prevent overfitting (see the paper), this network is trained on one board position per game. Even more interestingly, there is an added element of randomness to reduce the network's bias (and possibly resulting in more creativity) at this phase; training data comes from games of self-play where, at a random point in the game, a completely random (off policy) move is made. The game is then continued past that point using the greedy policy. The value network is trained to predict the winner from the position immediately following the random move.
This network is simply trained to minimize squared error between output values and the result of the game (+1 for wins and -1 for losses).
Phase 4: revisiting phase 2
Once the value network has learned to predict game outcomes, the self-play phase is repeated, except that instead of weights being adjusted based on wins and losses, they are adjusted based on how different the outcome was from the value predicted by the value network. Presumably this phase makes the policy and value functions more mutually consistent.
05. Supervised Policy Network (Phase I)
06. Reinforcement Policy Network (Phase II)
07. Value Network (Phase III)
08. Running models with GTP
09. Tests and Benchmarks
10. MCTS