OBB的计算python实现
OBB的计算python实现
- 1. 实现步骤
-
- 步骤① 分解点集的xyz分量
- 步骤② 对x、y、z这三个随机变量(一维数组)求协方差矩阵
- 步骤③ 对步骤②中的协方差矩阵求解特征值与特征向量,特征向量构造列向量矩阵M
- 步骤④ 将点集的几何中心平移至坐标系原点,并全部乘以M矩阵进行旋转变换
- 步骤⑤ 将旋转变换后的点的坐标,求xMax、xMin、yMax、yMin、zMax、zMin,进而求出obb中心坐标、obb半长
- 步骤⑥ 将obb中心坐标左乘M的逆,得到此中心坐标在原来坐标系的坐标值
- 步骤⑦ 将步骤⑥中得到的原坐标系下的obb中心坐标平移回原处(平移向量与步骤④的平移向量刚好是相反向量)
- 2. 代码实现OBB
-
- 2.1. OOBB in 2D
- 2.2. OBB in 3D
- 3. 函数实现
OBB的经典生成算法:使用PCA(主成分分析)。
主成分分析有一个关键的线性代数计算步骤,即求解协方差矩阵的特征值和特征向量,这一点必须使用数值分析算法而不能用解题用的基本行变换手段,因为现代程序最大的特点就是干一些枯燥重复的事情——迭代.
在这里主要介绍三维的思路,黑盒模型:
obb的参数(中心点、三轴向量、三轴半长,以确定一个空间中的矩形)= f(点集)
1. 实现步骤
步骤① 分解点集的xyz分量
即把所有点的 x、y、z 值分别放到独立的数组中
步骤② 对x、y、z这三个随机变量(一维数组)求协方差矩阵
步骤③ 对步骤②中的协方差矩阵求解特征值与特征向量,特征向量构造列向量矩阵M
步骤④ 将点集的几何中心平移至坐标系原点,并全部乘以M矩阵进行旋转变换
步骤⑤ 将旋转变换后的点的坐标,求xMax、xMin、yMax、yMin、zMax、zMin,进而求出obb中心坐标、obb半长
步骤⑥ 将obb中心坐标左乘M的逆,得到此中心坐标在原来坐标系的坐标值
步骤⑦ 将步骤⑥中得到的原坐标系下的obb中心坐标平移回原处(平移向量与步骤④的平移向量刚好是相反向量)
最后,得到:
特征向量作为obb的三个轴朝向
obb的三个方向的半长
obb的中心坐标
其中,计算难点在于步骤③,最经典的做法是使用 Jacobi 迭代计算算法,在数值分析课程中是一节基础,Jacobi 算法还是可以优化的。
还可以使用矩阵分解算法等进行优化。
参考:简述OBB算法:使用PCA计算
2. 代码实现OBB
2.1. OOBB in 2D
是之前讨论过的关于 bounding box,如果使用 AABB 也许不是最紧密的 bounding box,更紧密的有时候也叫 OBB oriented bounding-box 或者 OOBB Object Oriented Bounding Boxes,所以建议可以使用 PCA 来计算。

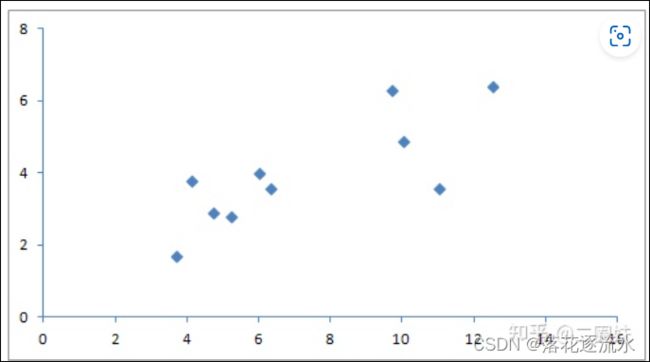
根据文章OBB generation via Principal Component Analysis,首先有一些例子点:
(3.7, 1.7), (4.1, 3.8), (4.7, 2.9), (5.2, 2.8), (6.0, 4.0), (6.3, 3.6), (9.7, 6.3), (10.0, 4.9), (11.0, 3.6), (12.5, 6.4)
然后它算 covarience matrix 是:

用 numpy 来处理:
points = np.asarray( [ (3.7, 1.7), (4.1, 3.8), (4.7, 2.9), (5.2, 2.8), (6.0, 4.0), (6.3, 3.6), (9.7, 6.3), (10.0, 4.9), (11.0, 3.6), (12.5, 6.4) ] )
np.cov( points )
// 上面这个不对,形状都完全不对,然后看了一下,好像应该这么写:
>>> np.cov( points, rowvar = False )
array([[10.09288889, 3.73888889],
[ 3.73888889, 2.24 ]])
这下形状对了,但是结果还是不一样啊,这个时候机智的我想到了在计算方差等等等老是出现的一个问题,那就是到底除以 N 还是除以 N-1,所以我来试验一下:
np.cov( points, rowvar = False ) / 10 * 9
array([[9.0836, 3.365 ],
[3.365 , 2.016 ]])
cool! 跟上面的 covarience matrix 一致了, 下一步来计算 covarience matrix 的 eigenvector。Hmmm,既然是计算 eigenvector,那么乘以一个常数是没有影响的,继续使用 numpy:
>>> np.linalg.eig( np.cov( points, rowvar = False ))
(array([11.58827588, 0.74461301]), array([[ 0.92849112, -0.37135459],
[ 0.37135459, 0.92849112]]))
出了一堆结果,根据这篇NumPy: Eigenvalues & Eigenvectors:
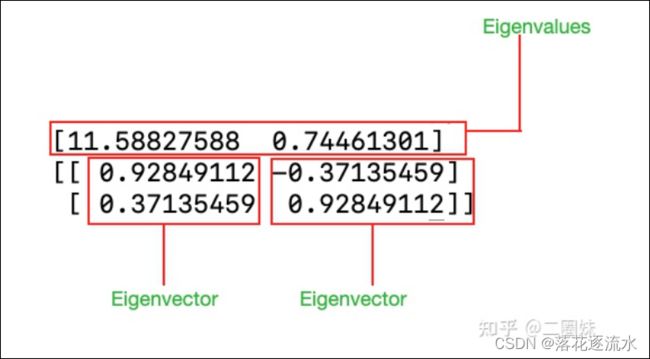
来解读,所以知道 eigenvector 是:

yep,又跟文章对上了, 根据文章,现在要继续的是
Projecting onto these vectors allow us to determine the OBB’s center and half-extent lengths, giving us the following image
文章就直接给出了结果,
然后突然发现了这里: Create the Oriented Bounding-box (OBB) with Python and NumPy
原来上面的除以 N 还是除以 N-1 是可以用 bias = 1 这个参数来描述的,完整的代码此处有:cool!
import matplotlib.pyplot as plt
import numpy as np
a = np.array([(3.7, 1.7), (4.1, 3.8), (4.7, 2.9), (5.2, 2.8), (6.0,4.0), (6.3, 3.6), (9.7, 6.3), (10.0, 4.9), (11.0, 3.6), (12.5, 6.4)])
ca = np.cov(a,y = None,rowvar = 0,bias = 1)
v, vect = np.linalg.eig(ca)
tvect = np.transpose(vect)
fig = plt.figure(figsize=(12,12))
ax = fig.add_subplot(111)
ax.scatter(a[:,0],a[:,1])
#use the inverse of the eigenvectors as a rotation matrix and
#rotate the points so they align with the x and y axes
ar = np.dot(a,np.linalg.inv(tvect))
# get the minimum and maximum x and y
mina = np.min(ar,axis=0)
maxa = np.max(ar,axis=0)
diff = (maxa - mina)*0.5
# the center is just half way between the min and max xy
center = mina + diff
#get the 4 corners by subtracting and adding half the bounding boxes height and width to the center
corners = np.array([center+[-diff[0],-diff[1]],center+[diff[0],-diff[1]],center+[diff[0],diff[1]],center+[-diff[0],diff[1]],center+[-diff[0],-diff[1]]])
#use the the eigenvectors as a rotation matrix and
#rotate the corners and the centerback
corners = np.dot(corners,tvect)
center = np.dot(center,tvect)
ax.scatter([center[0]],[center[1]])
ax.plot(corners[:,0],corners[:,1],'-')
plt.axis('equal')
plt.show()
关键在下面的这几行代码:
tvect = np.transpose(vect)
ar = np.dot(a,np.linalg.inv(tvect))
mina = np.min(ar,axis=0)
maxa = np.max(ar,axis=0)
diff = (maxa - mina)*0.5
corners = np.array([center+[-diff[0],-diff[1]],center+[diff[0],-diff[1]],center+[diff[0],diff[1]],center+[-diff[0],diff[1]],center+[-diff[0],-diff[1]]])
corners = np.dot(corners,tvect)
center = np.dot(center,tvect)
其实上面的 transpose inverse, 变换 corner, 再变换回来,是不是可以这样理解,这一整个其实在做的就是坐标变换。我们由上图的 xy坐标变换到了 PCA 的轴的方向,然后再变换回来,我们才能得到正确的 center 和 corner.
2.2. OBB in 3D
看见以上的代码,我想直接代入3D points感觉应该也是 ok 的,唯一需要注意的是 3D 的 corners 维度更多,上面的代码基本上可以直接套用到 3D 的情况,令我惊讶的是我用 bunny 看到的结果居然是这样

我好惊讶,然后我看到 Fitting Oriented Bounding Boxes 这篇里的例子跟我一样,当用 points 来 fit OBB 的话就会这样
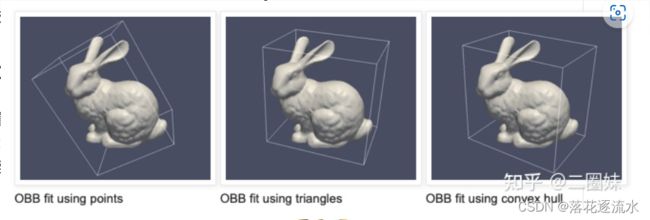
参考:Fitting Oriented Bounding Boxes
参考:Bounding Box - OOBB
参考:Create the Oriented Bounding-box (OBB) with Python and NumPy
参考:OBB generation via Principal Component Analysis
3. 函数实现
# 应用于2D、3D
def PCA(points):
pointArray = np.array(points)
ca = np.cov(pointArray,y = None,rowvar = 0,bias = 1)
v, vect = np.linalg.eig(ca)
tvect = np.transpose(vect)
#use the inverse of the eigenvectors as a rotation matrix and
#rotate the points so they align with the x and y axes
ar = np.dot(pointArray,np.linalg.inv(tvect))
# get the minimum and maximum x and y
mina = np.min(ar,axis=0)
maxa = np.max(ar,axis=0)
diff = (maxa - mina)*0.5
# the center is just half way between the min and max xy
center = mina + diff
#get the 8 corners by subtracting and adding half the bounding boxes height and width to the center
pointShape = pointArray.shape
if pointShape[1] == 2:
corners = np.array([center+[-diff[0],-diff[1]],
center+[diff[0],-diff[1]],
center+[diff[0],diff[1]],
center+[-diff[0],diff[1]],
center+[-diff[0],-diff[1]]])
if pointShape[1] == 3:
#get the 8 corners by subtracting and adding half the bounding boxes height and width to the center
corners = np.array([center+[-diff[0],-diff[1],-diff[2]],
center+[diff[0],-diff[1],-diff[2]],
center+[diff[0],diff[1],-diff[2]],
center+[-diff[0],diff[1],-diff[2]],
center+[-diff[0],diff[1],diff[2]],
center+[diff[0],diff[1],diff[2]],
center+[diff[0],-diff[1],diff[2]],
center+[-diff[0],-diff[1],diff[2]],
center+[-diff[0],-diff[1],-diff[2]]])
#use the the eigenvectors as a rotation matrix and
#rotate the corners and the centerback
corners = np.dot(corners,tvect)
center = np.dot(center,tvect)
radius = diff
if pointShape[1] == 2:
array0,array1 = np.abs(vect[0,:]),np.abs(vect[1,:])
index0,index1 = np.argmax(array0),np.argmax(array1)
radius[index0],radius[index1] = diff[0],diff[1]
if pointShape[1] == 3:
array0,array1,array2 = np.abs(vect[0,:]),np.abs(vect[1,:]),np.abs(vect[2,:])
index0,index1,index2 = np.argmax(array0),np.argmax(array1),np.argmax(array2)
radius[index0],radius[index1],radius[index2] = diff[0],diff[1],diff[2]
eigenvalue = v
eigenvector = vect
return corners, center, radius,eigenvalue,eigenvector
调用测试
corners, pcaCenter, pcaRadius,eigenvalue,eigenvector = PCA(rasPts)
print("corners", corners)
print("center", center)
print("radius", radius)
print("eigenvalue", eigenvalue)
print("eigenvector", eigenvector)
输出
corners [[-214.08716255 -287.34124873 329.15531199]
[-206.02520693 -222.36772698 349.92398594]
[-155.32541073 -228.84508711 350.5074316 ]
[-163.38736634 -293.81860887 329.73875765]
[-165.25498872 -305.17224576 365.98288493]
[-157.1930331 -240.19872401 386.75155889]
[-207.8928293 -233.72136387 386.16811323]
[-215.95478492 -298.69488563 365.39943928]
[-214.08716255 -287.34124873 329.15531199]]
center [-185.64009782 -263.76998637 357.95343544]
radius [25.55761109 34.34345453 19.01334956]
eigenvalue [221.80978801 109.57123123 54.06473478]
eigenvector [[ 0.11737252 0.99187275 -0.04911345]
[ 0.94593748 -0.12672077 -0.29857014]
[ 0.30236728 0.01141432 0.95312315]]