LOAM系列之点云预处理理解
LOAM系列之点云预处理理解
文章目录
- LOAM系列之点云预处理理解
-
- 1 上代码
- 2 多线激光雷达简简单单介绍
- 3 代码解读
-
- 3.1 起始结束点
- 3.1 中间点-未过半
- 3.2 中间点-过半
- 4 总结
- 5 参考
LOAM作为一个非常经典的3D激光SLAM算法,一直被各种模仿和升级( L e g o − L O A M , a − l o a m , f l o a m , l i v o x − l o a m , L i o − m a p p i n g , l i o − S A M Lego-LOAM,a-loam,floam,livox-loam,Lio-mapping,lio-SAM Lego−LOAM,a−loam,floam,livox−loam,Lio−mapping,lio−SAM)等等等等,虽然升级的版本很多,但是在点云处理阶段基本都大同小异,都需要获取点云中每个点的线序以及在这一帧点云的角度,进而算出一个scale,用于后面的运动补偿和匹配上。
相信大家看代码一定会看到计算点所在的线束以及角度的这个函数,这里面有好多角度, s t a r t O r i , e n d O r i , h a l f P a s s e d , + = 2 ∗ M P I , − = 2 ∗ M P I , M P I ∗ 3 / 2 startOri, endOri,halfPassed,+= 2 * M_PI,-=2 * M_PI,M_PI * 3 / 2 startOri,endOri,halfPassed,+=2∗MPI,−=2∗MPI,MPI∗3/2啥啥啥的,我滴天,这些都是啥玩意儿,看网上也很少有比较详细的解读(也可能是我太菜了,之前看了半天愣是没看懂),所以,我就抛砖引玉,做个自己的理解的分享,希望对大家有所帮助,更新不易,如有转载或其它用途,请与我联系,注明出处!如有忘了引用的参考,也请与我联系,我改正添加!
1 上代码
废话不多说,从代码开始,这里就以最经典的Loam代码来做分析,其它的应该差不太多。
void MultiScanRegistration::process(const pcl::PointCloud& laserCloudIn, const Time& scanTime)
{
size_t cloudSize = laserCloudIn.size();
// determine scan start and end orientations
float startOri = -std::atan2(laserCloudIn[0].y, laserCloudIn[0].x);
float endOri = -std::atan2(laserCloudIn[cloudSize - 1].y,
laserCloudIn[cloudSize - 1].x) + 2 * float(M_PI);
if (endOri - startOri > 3 * M_PI) {
endOri -= 2 * M_PI;
} else if (endOri - startOri < M_PI) {
endOri += 2 * M_PI;
}
bool halfPassed = false;
pcl::PointXYZI point;
_laserCloudScans.resize(_scanMapper.getNumberOfScanRings());
// clear all scanline points
std::for_each(_laserCloudScans.begin(), _laserCloudScans.end(), [](auto&&v) {v.clear(); });
// extract valid points from input cloud
for (int i = 0; i < cloudSize; i++) {
point.x = laserCloudIn[i].y;
point.y = laserCloudIn[i].z;
point.z = laserCloudIn[i].x;
// skip NaN and INF valued points
if (!pcl_isfinite(point.x) ||
!pcl_isfinite(point.y) ||
!pcl_isfinite(point.z)) {
continue;
}
// skip zero valued points
if (point.x * point.x + point.y * point.y + point.z * point.z < 0.0001) {
continue;
}
// calculate vertical point angle and scan ID
float angle = std::atan(point.y / std::sqrt(point.x * point.x + point.z * point.z));
int scanID = _scanMapper.getRingForAngle(angle);
if (scanID >= _scanMapper.getNumberOfScanRings() || scanID < 0 ){
continue;
}
// calculate horizontal point angle
float ori = -std::atan2(point.x, point.z);
if (!halfPassed) {
if (ori < startOri - M_PI / 2) {
ori += 2 * M_PI;
} else if (ori > startOri + M_PI * 3 / 2) {
ori -= 2 * M_PI;
}
if (ori - startOri > M_PI) {
halfPassed = true;
}
} else {
ori += 2 * M_PI;
if (ori < endOri - M_PI * 3 / 2) {
ori += 2 * M_PI;
} else if (ori > endOri + M_PI / 2) {
ori -= 2 * M_PI;
}
}
// calculate relative scan time based on point orientation
float relTime = config().scanPeriod * (ori - startOri) / (endOri - startOri);
point.intensity = scanID + relTime;
projectPointToStartOfSweep(point, relTime);
_laserCloudScans[scanID].push_back(point);
}
processScanlines(scanTime, _laserCloudScans);
publishResult();
}
2 多线激光雷达简简单单介绍
预处理的代码核心就在这个函数里面,在讲解代码之前,做个关于多线激光雷达的说明,因为代码中用的是velodyne16线的激光雷达,拥有16个激光发射器,对于机械式雷达来说,这16个发射器会同时保持固定的相对位置一起绕着雷达中心轴旋转。
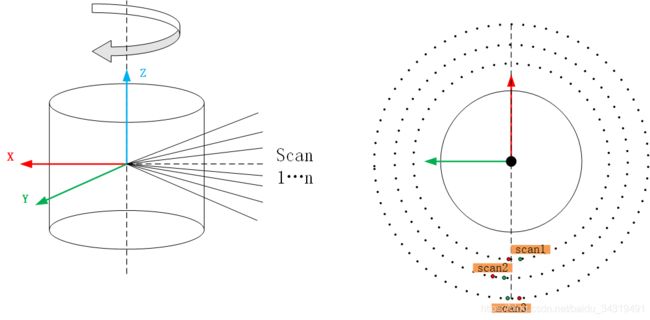
主视图和俯视图如上面所示,左边是简化的结构,注意,实际上,激光发射器,不是从原点发射出去的,这里只是为了简化说明,实际的雷达激光发射器会在中轴线附近按照一定的俯仰角度排布,只不过根据激光接收的数据反解算到了雷达中心坐标系下;图中雷达是顺时针旋转,需要注意的是,有可能也可以是逆时针旋转的,这个每个型号可能不一样,但是只要开机了就会一直朝着一个方向转。
俯视图里,首先,图里面的scan1,scan2,scan3表示不同的激光发射器打在地面上形成的圆环,如果不是地面上,那就不是同心圆了,其中,红色的点表示这一根线的开始点,绿色表示这一根线的终点,这里再补充说明一下,就是对于不同线束的多线激光雷达,内部的激光发射器排布方式不统一,如,16线有可能是所有激光发射器在统一纵向平面,且水平朝向一致,32线就有可能出现激光发射器不在同一平面的情况,也就是右图中会出现scan2和scan1的起点相对于雷达xy坐标水平角度不一致的情况;再有,雷达根据分帧方式的不同,可能会出现一帧的点云里覆盖的角度不止360°的情况,就会出现终点在起点前面的情况,也就是图中的scan3,当然,对于同一颗雷达,scan1和scan2可能同时发生,scan3和scan1是不能同时发生的,否则雷达就有问题了,因为大家如果用sensor_msgs::PointCloud2消息,或者pcl::PointCloud的时候,都会发现数据里有个width和height,这个height就是线束,而这个width 就是每根线一圈的采样点,不管怎么排布激光头,它们转动的角度都是一样的,所以采样点也得一样。总之,不管怎么样的方式,Loam里的处理都能很好地解决。
3 代码解读
3.1 起始结束点
这里基于顺时针的旋转方向来讨论。
float startOri = -std::atan2(laserCloudIn[0].y, laserCloudIn[0].x);
float endOri = -std::atan2(laserCloudIn[cloudSize - 1].y,
laserCloudIn[cloudSize - 1].x) + 2 * float(M_PI);
if (endOri - startOri > 3 * M_PI) {
endOri -= 2 * M_PI;
} else if (endOri - startOri < M_PI) {
endOri += 2 * M_PI;
}
bool halfPassed = false;
首先看代码里面的这一段,判断起始点的角度,很好奇的是为什么要再atan2函数前面乘一个负号,实际上,根据代码,画出来就可以明白了,首先,我们知道,atan2的取值范围是(-pi,pi),那么-atan2的取值范围也是(-pi,pi),看起来好像没有什么区别,实际上对应到点云去看,就会发现端倪。这里拿scan1来进行说明,红色是起点,按照atan2算出来,应该是一个接近pi的数值,绿色是终点,按照atan2算出来,应该是一个接近-pi的数值,都乘了负号,那么结果就反过来了,也就是说,在雷达的左半边,角度是(-pi,0),右半边是(0,pi),为了方便,下图画出了一维坐标轴,其中,红色的线段部分表示雷达左边那边,绿色的线段部分表示雷达的右半边。整个坐标轴的范围是(-pi,3pi),halfPassed仅仅表示是否转过了一半了。红色正方形表示起点,绿色正方形表示计算的终点,绿色心形表示最终计算的终点。

如图上两种情况,首先,对于case1,红色的正方形表示计算出的startOri位置,绿色的表示计算出的endOri,此时,endOri - startOri>3pi,所以,实际的终点应该-2pi,在绿色心形的位置,然后对于case2,同样的道理,只不过此时endOri - startOri+2pi,在绿色心形的位置,当然,大家可以考虑scan3的道理,去绘制相应的结果。所以从这里就可以看出,作者是希望能将一帧中每一根光束内的所有的点云,按照角度从小到大的排序,这样很方便后面判断是不是过半了,不得不说这种方法很巧妙。
// calculate horizontal point angle
float ori = -std::atan2(point.x, point.z);
if (!halfPassed) {
if (ori < startOri - M_PI / 2) {
ori += 2 * M_PI;
} else if (ori > startOri + M_PI * 3 / 2) {
ori -= 2 * M_PI;
}
if (ori - startOri > M_PI) {
halfPassed = true;
}
} else {
ori += 2 * M_PI;
if (ori < endOri - M_PI * 3 / 2) {
ori += 2 * M_PI;
} else if (ori > endOri + M_PI / 2) {
ori -= 2 * M_PI;
}
}
接下来就是对每个点进行计算了,其实弄懂了上面的东西,下面这些内容就很容易看明白了,首先,对于没有过半的情况,如果某个点的角度ori < startOri - M_PI / 2,那么这个实际上对应的就是上面图中的case2的情况,即出现了跨区间,那么此时,就要将角度加上一个周期,这样才能保证点云的连续性,反之,如果是ori > startOri + M_PI * 3 / 2,那么实际上就是对应着case1中的情况,一直到要过半了的情况。
3.1 中间点-未过半
if (!halfPassed) {
if (ori < startOri - M_PI / 2) {
ori += 2 * M_PI;
} else if (ori > startOri + M_PI * 3 / 2) {
ori -= 2 * M_PI;
}
if (ori - startOri > M_PI) {
halfPassed = true;
}
}
3.2 中间点-过半
else {
ori += 2 * M_PI;
if (ori < endOri - M_PI * 3 / 2) {
ori += 2 * M_PI;
} else if (ori > endOri + M_PI / 2) {
ori -= 2 * M_PI;
}
}
对于过半了的情况,首先要做的就是要先加上一个2pi,让点云的角度落在比起始角度大的区间内,如果说ori < endOri - M_PI * 3 / 2,这时对应的是case2的情况,而且这个点是转过一圈后落在雷达的左半边的,因为只有这样, o r i ∈ ( p i , 3 p i / 2 ) ori \in (pi,3pi/2) ori∈(pi,3pi/2),但是实际上是已经很靠近终点的了,所以要加上2pi才能得到正确的比例。相反,如果ori > endOri + M_PI / 2,这时对应的是case1的情况,此时雷达就转过了半圈,点落在雷达的右半边, o r i ∈ ( 2 p i + d x , 3 p i ) ori \in (2pi+dx,3pi) ori∈(2pi+dx,3pi),其中dx是起点相对于-pi的绝对角度差,此时都比endOri + M_PI / 2要大,所以要减去2pi。
个人认为,其实这里做了个限定,就是认为一帧雷达最多转过的角度为360+90=450°,所以才会有pi/2,3pi/2这些角度。
4 总结
LOAM作为很经典的3D-SLAM,确实很值得一读,以上内容纯属个人理解,如果哪里不正确,欢迎指出改正,如有转载或其它用途,请与我联系注明出处!如有忘了引用的参考,也请与我联系,我改正添加!
5 参考
《LOAM:Lidar Odometry and Mapping in Realtime》
https://github.com/laboshinl/loam_velodyne