基于ICP配准算法的三维点云数据的匹配仿真
目录
1.算法仿真效果
2.MATLAB核心程序
3.算法涉及理论知识概要
4.完整MATLAB
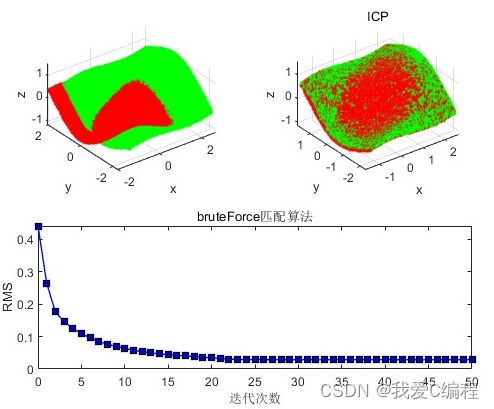
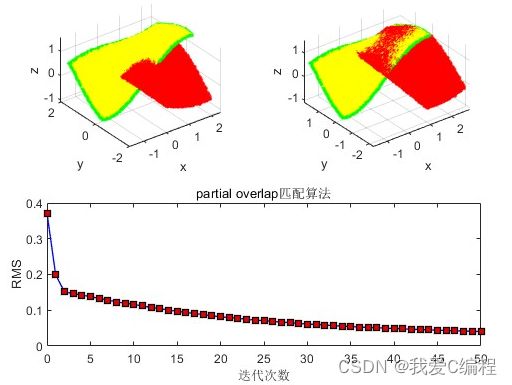
1.算法仿真效果
matlab2022a仿真结果如下:

2.MATLAB核心程序
................................................................................
% If Matching == 'Delaunay', a triangulation is needed
if strcmp(arg.Matching, 'Delaunay')
DT = DelaunayTri(transpose(q));
end
% If Matching == 'kDtree', a kD tree should be built (req. Stat. TB >= 7.3)
if strcmp(arg.Matching, 'kDtree')
kdOBJ = KDTreeSearcher(transpose(q));
end
% If edge vertices should be rejected, find edge vertices
if arg.EdgeRejection
if isempty(arg.Boundary)
bdr = find_bound(q, arg.Triangulation);
else
bdr = arg.Boundary;
end
end
if arg.Extrapolation
% Initialize total transform vector (quaternion ; translation vec.)
qq = [ones(1,arg.iter+1);zeros(6,arg.iter+1)];
% Allocate vector for direction change and change angle.
dq = zeros(7,arg.iter+1);
theta = zeros(1,arg.iter+1);
end
t(1) = toc;
% Go into main iteration loop
for k=1:arg.iter
% Do matching
switch arg.Matching
case 'bruteForce'
[match mindist] = match_bruteForce(q,pt);
case 'Delaunay'
[match mindist] = match_Delaunay(q,pt,DT);
case 'kDtree'
[match mindist] = match_kDtree(q,pt,kdOBJ);
end
.......................................................................
% Add to the total transformation
TR(:,:,k+1) = R*TR(:,:,k);
TT(:,:,k+1) = R*TT(:,:,k)+T;
% Apply last transformation
pt = TR(:,:,k+1) * p + repmat(TT(:,:,k+1), 1, Np);
% Root mean of objective function
ER(k+1) = rms_error(q(:,q_idx), pt(:,p_idx));
% If Extrapolation, we might be able to move quicker
if arg.Extrapolation
qq(:,k+1) = [rmat2quat(TR(:,:,k+1));TT(:,:,k+1)];
dq(:,k+1) = qq(:,k+1) - qq(:,k);
theta(k+1) = (180/pi)*acos(dot(dq(:,k),dq(:,k+1))/(norm(dq(:,k))*norm(dq(:,k+1))));
if arg.Verbose
disp(['Direction change ' num2str(theta(k+1)) ' degree in iteration ' num2str(k)]);
end
if k>2 && theta(k+1) < 10 && theta(k) < 10
d = [ER(k+1), ER(k), ER(k-1)];
v = [0, -norm(dq(:,k+1)), -norm(dq(:,k))-norm(dq(:,k+1))];
vmax = 25 * norm(dq(:,k+1));
dv = extrapolate(v,d,vmax);
if dv ~= 0
q_mark = qq(:,k+1) + dv * dq(:,k+1)/norm(dq(:,k+1));
q_mark(1:4) = q_mark(1:4)/norm(q_mark(1:4));
qq(:,k+1) = q_mark;
TR(:,:,k+1) = quat2rmat(qq(1:4,k+1));
TT(:,:,k+1) = qq(5:7,k+1);
% Reapply total transformation
pt = TR(:,:,k+1) * p + repmat(TT(:,:,k+1), 1, Np);
% Recalculate root mean of objective function
% Note this is costly and only for fun!
switch arg.Matching
case 'bruteForce'
[~, mindist] = match_bruteForce(q,pt);
case 'Delaunay'
[~, mindist] = match_Delaunay(q,pt,DT);
case 'kDtree'
[~, mindist] = match_kDtree(q,pt,kdOBJ);
end
ER(k+1) = sqrt(sum(mindist.^2)/length(mindist));
end
end
end
t(k+1) = toc;
end
if not(arg.ReturnAll)
TR = TR(:,:,end);
TT = TT(:,:,end);
end
A344
3.算法涉及理论知识概要
ICP算法能够使不同的坐标下的点云数据合并到同一个坐标系统中,首先是找到一个可用的变换,配准操作实际是要找到从坐标系1到坐标系2的一个刚性变换。ICP算法本质上是基于最小二乘法的最优配准方法。该算法重复进行选择对应关系点对, 计算最优刚体变换,直到满足正确配准的收敛精度要求。ICP 算法的目的是要找到待配准点云数据与参考云数据之间的旋转参数R和平移参数 T,使得两点数据之间满足某种度量准则下的最优匹配。
假设给两个三维点集 X1 和 X2,ICP方法的配准步骤如下:
第一步,计算X2中的每一个点在X1 点集中的对应近点;
第二步,求得使上述对应点对平均距离最小的刚体变换,求得平移参数和旋转参数;
第三步,对X2使用上一步求得的平移和旋转参数,得到新的变换点集;
第四步, 如果新的变换点集与参考点集满足两点集的平均距离小于某一给定阈值,则停止迭代计算,否则新的变换点集作为新的X2继续迭代,直到达到目标函数的要求。
最近点对查找:对应点的计算是整个配准过程中耗费时间最长的步骤,查找最近点,利用 k-d tree提高查找速度 K-d tree 法建立点的拓扑关系是基于二叉树的坐标轴分割,构造 k-d tree 的过程就是按照二叉树法则生成,首先按 X 轴寻找分割线,即计算所有点的x值的平均值,以最接近这个平均值的点的x值将空间分成两部分,然后在分成的子空间中按 Y 轴寻找分割线,将其各分成两部分,分割好的子空间在按X轴分割……依此类推,最后直到分割的区域内只有一个点。这样的分割过程就对应于一个二叉树,二叉树的分节点就对应一条分割线,而二叉树的每个叶子节点就对应一个点。这样点的拓扑关系就建立了。
点云配准本质上是将点云从一个坐标系变换到另一个坐标系。
点云配准通常会需要用到两个点云数据。第一类点云数据称为原始点云,用S(source)来表示。第二类点云数据称为目标点云,用T(Target)来表示。
点云配准是让原始点云S在目标点云T的坐标上进行显示。我们可以通过找到点云中具有相似特征的点云来确定坐标的变换关系。例如,同一个物体的点云同时出现在原始点云和目标点云中,并且在两个点云中有特征相似的部分点云,根据这些相似的点云信息来计算出变换关系。
假设原始点云到目标点云发生的是刚体变换,即原始点云通过旋转和平移即可得到目标点云。这里的旋转和平移过程用旋转变换矩阵R和平移变换矩阵T来表示。我们用P(S)表示原始点云中的点,P(T)表示原始点云在目标点云坐标系中的点。那么这种变换关系可以表示为:

因此,点云配准的主要任务是计算出旋转矩阵R和平移矩阵T。
4.完整MATLAB
V