笔记:Andrew Ng's Deeping Learning视频
参考:https://xienaoban.github.io/posts/41302.html
参考:https://blog.csdn.net/u012328159/article/details/80210363
1. 训练集、验证集、测试集(Train, Dev, Test Sets)
-
当数据量小的时候, 70% 训练, 30% 测试;或 60% 训练、20% 验证、20%测试.
-
训练集( training set):用来训练模型,即被用来 学习 得到系统的 参数取值.
-
测试集( testing set):用于最终报告模型的评价结果,因此在训练阶段测试集中的样本应该是不可见的.
-
对训练集做进一步划分为 训练集、验证集 validation set.
-
验证集:与测试集类似,也是用于评估模型的性能.
-
区别:是 验证集 主要 用于 模型选择 和 调整超参数,因而一般不用于报告最终结果.
-
-
-
当我们有大于100万条数据时, 测试集验证集各取1万条即可, 足以评估单个分类器.
-
确保验证集和测试集的数据来自同一分布.
-
如果不需要无偏估计, 可以不设置测试集; 当没设立测试集的时候, 验证集通常被人们称为测试集.
2. 偏差、方差(Bias, Variance)
-
高偏差(high bias)称为"欠拟合"(underfitting), 训练集误差与验证集误差都高.
- 选择一个新的网络,比如含有更多隐藏层或者隐藏单元的网络,或者花费更多时间来训练网络,或者尝试更先进的优化算法【后面深入讲解】
-
高方差(high variance)称为"过拟合"(overfitting), 训练集误差很低,而验证集误差很高.
-
解决方法是 正则化
-
准备更多的数据.
-


3. 正则化(Regularization)
- 避免过拟合
- 减少网络误差
3.1 逻辑回归中的L1正则化, L2正则化
对于L1正则化, 为代价函数添加L1范数:(几乎不用了)
其中:
- 使用L1正则化, w最终会是稀疏的(w中含很多0), 有利于压缩模型
- 但也没有降低太多内存, 所以不能将压缩作为L1正则化的目的。通常我们使用L2正则化.
对于L2正则化, 为代价函数添加L2范数:
其中:
尽管 \(b\) 也是参数, 但我们没有必要添加 \(\frac{\lambda}{2m}b^2\) 项, 因为 \(w\) 几乎涵盖了所有参数, 而 \(b\) 只是众多参数中的一个, 可以忽略不计(当然加上也没问题).
3.2 神经网络中的L2正则化
对于神经网络L2正则化(权重衰减),为代价函数添加L2范数:
其中,弗罗贝尼乌斯范数(即矩阵L2范数,矩阵中所有元素平方和):
则在反向传播时,
正则项说明, 无论 \(w^{[l]}\) 是什么, 我们都努力使之更小(趋于0), 则计算得的 \(z^{[l]}=w^{[l]}a^{[l−1]}+b^{[l]}\) 此时也更小
\(z^{[l]}\) 更容易(以tanh例) 落在激活函数 \(g(z^{[l]})\) 中间那一段接近线性的部分, 以达到简化网络的目的
- 注:线性的激活函数使得无论多少层的网络, 效果都和一层一样
3.3 随机失活(Dropout)正则化
对每一轮的训练, Dropout 遍历网络的每一层, 设置神经网络中每一层每个节点的失活概率
被随机选中失活的节点临时被消除, 不参与本轮的训练, 于是得到一个更小的网络.

最常用的为反向随机失活(Inverted Dropout).
该方法在向前传播时, 根据随机失活的概率 (例如0.2),将每一层(例如 \(l\) 层)的 \(a^{[l]}\) 矩阵(a=g(z)) 中被选中失活的元素置为0, 则该层的 \(a^{[l]}\) 相当于少了 20% 的元素.
为了不影响下一层 \(z^{[l+1]}\) 的期望值, 我们需要 \(a^{[l]}\) /= 0.8 以修正权重.
代码实现:
- 前向传播
def forward_propagation_with_dropout(X, parameters, keep_prob = 0.8):
"""
X -- input dataset, of shape (input size, number of examples)
parameters -- python dictionary containing your parameters "W1", "b1", "W2", "b2",...,"WL", "bL"
W -- weight matrix of shape (size of current layer, size of previous layer)
b -- bias vector of shape (size of current layer,1)
keep_prob: probability of keeping a neuron active during drop-out, scalar
:return:
AL: the output of the last Layer(y_predict)
caches: list, every element is a tuple:(W,b,z,A_pre)
"""
np.random.seed(1) #random seed
L = len(parameters) // 2 # number of layer
A = X
caches = [(None,None,None,X,None)] # 用于存储每一层的,w,b,z,A,D第0层w,b,z用none代替
# calculate from 1 to L-1 layer
for l in range(1, L):
A_pre = A
W = parameters["W" + str(l)]
b = parameters["b" + str(l)]
z = np.dot(W, A_pre) + b # 计算z = wx + b
A = relu(z) # relu activation function
D = np.random.rand(A.shape[0], A.shape[1]) #initialize matrix D
D = (D < keep_prob) #convert entries of D to 0 or 1 (using keep_prob as the threshold)
A = np.multiply(A, D) #shut down some neurons of A
A = A / keep_prob # scale the value of neurons that haven't been shut down
caches.append((W, b, z, A,D))
# calculate Lth layer
WL = parameters["W" + str(L)]
bL = parameters["b" + str(L)]
zL = np.dot(WL, A) + bL
AL = sigmoid(zL)
caches.append((WL, bL, zL, A))
return AL, caches- 后向传播
def backward_propagation_with_dropout(AL, Y, caches, keep_prob = 0.8):
"""
Implement the backward propagation presented in figure 2.
Arguments:
X -- input dataset, of shape (input size, number of examples)
Y -- true "label" vector (containing 0 if cat, 1 if non-cat)
caches -- caches output from forward_propagation(),(W,b,z,pre_A)
keep_prob: probability of keeping a neuron active during drop-out, scalar
Returns:
gradients -- A dictionary with the gradients with respect to dW,db
"""
m = Y.shape[1]
L = len(caches) - 1
# print("L: " + str(L))
# calculate the Lth layer gradients
prev_AL = caches[L - 1][3]
dzL = 1. / m * (AL - Y)
dWL = np.dot(dzL, prev_AL.T)
dbL = np.sum(dzL, axis=1, keepdims=True)
gradients = {"dW" + str(L): dWL, "db" + str(L): dbL}
# calculate from L-1 to 1 layer gradients
for l in reversed(range(1, L)): # L-1,L-2,...,1
post_W = caches[l + 1][0] # 要用后一层的W
dz = dzL # 用后一层的dz
dal = np.dot(post_W.T, dz)
Dl = caches[l][4] #当前层的D
dal = np.multiply(dal, Dl) #Apply mask Dl to shut down the same neurons as during the forward propagation
dal = dal / keep_prob #Scale the value of neurons that haven't been shut down
Al = caches[l][3] #当前层的A
dzl = np.multiply(dal, relu_backward(Al))#也可以用dzl=np.multiply(dal, np.int64(Al > 0))来实现
prev_A = caches[l-1][3] # 前一层的A
dWl = np.dot(dzl, prev_A.T)
dbl = np.sum(dzl, axis=1, keepdims=True)
gradients["dW" + str(l)] = dWl
gradients["db" + str(l)] = dbl
dzL = dzl # 更新dz
return gradients注意:
-
训练时的 "\(a^{[l]}\) /= 0.8" 要修复权重
-
在测试阶段无需使用 Dropout.(测试阶段要关掉)
-
Dropout 不能与梯度检验同时使用,因为 Dropout 在梯度下降上的代价函数J难以计算.
3.4 其他正则化
数据扩增:
- 比如训练分类猫咪的图片, 将图片左右翻转、旋转一个小角度、稍微变形处理等, 可以人工合成数据.
Early Stopping:
-
运行梯度下降时, 我们可以绘制训练误差, 当验证集误差不降反增的时候, 停止训练.
-
缺点:是可能导致代价J值不够小, 却又没解决继续训练可能导致的过拟合问题.
4. 归一化(Normalizing)
- 加速训练
输入的归一化有两个步骤:
- 均值调整为0
- 方差归一化
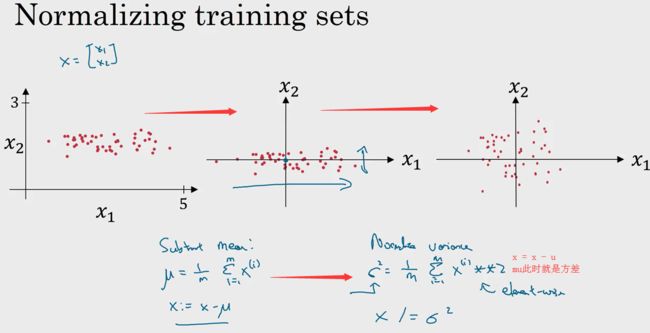
注:此时x1, x2方差均为1
归一化直观的理解就是使得代价函数更圆, 更容易优化代价函数.

5. 梯度消失/爆炸(Vanishing / Exploding Gradients)
- 加速训练
为了方便理解,假设使用了线性激活函数 g(z)=z , 且
则:
可知若 \(W\) 中有元素权重为 1.5 , 则最终得到 \({1.5}^{L−1}\) 若层数很深, 计算得 \(\hat{y}\) 也很大;
同理若权重为 0.5 , 进行 L−1 次幂运算后值会很小. 这便是梯度爆炸 与 梯度消失.
有效的解决方案:
-
由于 \(z=w_1x_1+w_2x_2+...+w_nx_n\) (忽略 \(b\)), 为了预防 \(z\) 太大或太小, 则 \(n\) 越大时, 期望 \(w_i\) 越小
-
则在随机(0~1)初始化 \(W\) 时, 我们对其乘上一个小于1的倍数, 使之更小.
-
对于Tanh, 权重乘上 \(\sqrt{\frac{1}{n^{[l-1]}}}\) 或者 \(\sqrt{\frac{2}{n^{[l-1]}+n^{[l]}}}\)
-
对于Relu, 权重乘上 \(\sqrt{\frac{2}{n^{[l-1]}}}\)
-
# GRADED FUNCTION: initialize_parameters_he
def initialize_parameters_he(layers_dims):
"""
Arguments:
layer_dims -- python array (list) containing the size of each layer.
Returns:
parameters -- python dictionary containing your parameters "W1", "b1", ..., "WL", "bL":
W1 -- weight matrix of shape (layers_dims[1], layers_dims[0])
b1 -- bias vector of shape (layers_dims[1], 1)
...
WL -- weight matrix of shape (layers_dims[L], layers_dims[L-1])
bL -- bias vector of shape (layers_dims[L], 1)
"""
np.random.seed(3)
parameters = {}
L = len(layers_dims) - 1 # integer representing the number of layers
for l in range(1, L + 1):
### START CODE HERE ### (≈ 2 lines of code)
parameters['W' + str(l)] = np.random.randn(layers_dims[l], layers_dims[l-1]) * (np.sqrt(2. / layers_dims[l-1]))
parameters['b' + str(l)] = np.zeros((layers_dims[l], 1))
### END CODE HERE ###
return parameters随机用大的数进行初始化W,画出的cost下降的曲线:
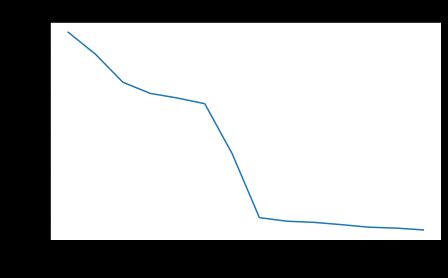
用上面方法进行初始化W,画出的cost下降的曲线:

6. 梯度检验

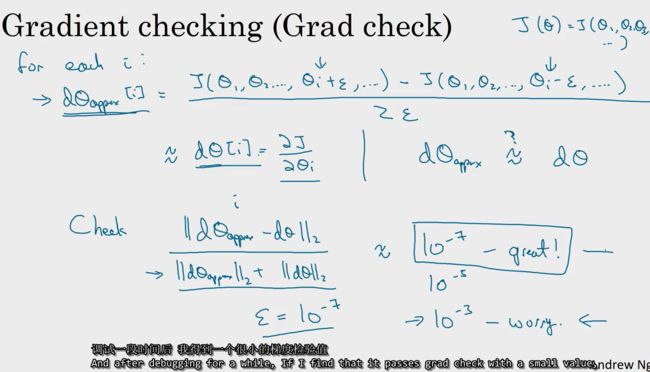
在反向传播的时候, 如果怕自己 \(d\theta[i] = \frac{\partial J}{\partial \theta_i}\) 等算错, 可以用导数的定义, 计算\({for\ each\ i:}\)
然后根据 两者误差 估计自己是否算错. 该方法仅用来调试
且不能同 Dropout 同时使用.