Towards Real-Time Multi-Object Tracking(JDE)
本文我们接着对多目标追踪(MOT)领域常见的模型和算法进行学习,这次的主角是JDE,JDE可不是一个模型的名字,而是一类追踪算法的总称,全称叫做
Jointly learns the Detector and Embedding model (JDE)
什么意思呢?我们之前讨论的一些多目标追踪模型,比如SORT和DeepSORT,都是2015-2018年常见的MOT范式,也就是tracking by detection 。
该类范式因为通俗易懂,且表现出了不俗的追踪精度,在2015年到2018年,一度成为MOT的主流范式。该范式首先通过检测器(detector)检测出画面中物体所在的检测框,然后根据物体检测框移动的规律(运动特征)和检测框中物体的外观特征(通常通过一个ReID网络抽取一个低维的向量,叫做embedding向量)来进行前后帧同一物体的匹配,从而实现多目标追踪。
该类范式将MOT分为了两步,即
- 物体检测
- 特征提取与物体关联
该类方法检测与特征提取是分开的,所以又被称为SDE
Separate Detection and Embedding (SDE)
SDE存在的最大缺点就是速度慢,因为将物体检测和(外观)特征提取分开,检测速度自然就下去了。
那么作者考虑到这点不足,提出了JDE范式。论文和代码链接如下:
论文:Towards Real-Time Multi-Object Tracking
代码:Zhongdao/Towards-Realtime-MOT
1 JDE产生背景

其实,作者有对比了前面方法:
1)、SDE(Separate Detection and Embedding)就是两阶段法。检测器和Reid模块是独立开来的,先检测后识别(感觉思想和Fast RCNN很像),这些方法需要分为两部分操作,两部分不相互干扰,精度高,但是耗时长。
2)、作者这里的two-stage实际上应该也是一种端到端的方法,只是不是利用检测的最后的结果,而是利用两阶段检测法中FPN生成的框来做Embedding,这样做可以贡献部分特征,减少计算量。但是二阶段法不来就不是很快,所以整体速度依然达不到实时。
2 JDE的网络结构和损失函数
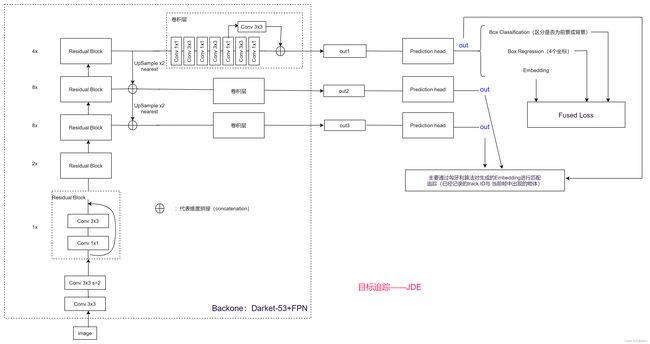
既然作者提到该方法是基于One-stage检测器学习到物体的embedding的(代码中采用的是经典的YOLO V3模型)。那么JDE范式就应该在检测器的输出(head),多输出一个分支用来学习物体的embedding的。
果不其然,作者就是采用了这种思路。原论文中给出结构图如下

这个结构图勾勒了作者大致的想法,在Prediction head中多出来了一个分支用于输出embedding。然后使用一个**多任务学习(multi-task learning)**的思路设置损失函数。看的时候觉得如此简单,但是深思了下,发现问题没有这么简单。
我根据源码自己又画了一个图:
第一个问题就是embedding要怎么学出来?
我们知道,理想情况下同一物体在不同的帧中,被同一跟踪标签锁定(即拥有同一track ID)。我们知道的信息就只有他们的标签索引(同一物体的track ID一致,不同物体的track ID不一样)。
那么网络在训练的过程中,应该需要对embedding进行转化,转化为足够强的语义信息,也就是这个embedding可以轻松的区分检测出来的目标属于哪个track ID的物体,那么这种就需要借鉴物体分类的思路了(将每个track ID当作一个类别),所以作者引入了全连接层将embedding信息转化为track ID分类信息。
第二个问题就是这个全连结层的输出节点到底是多少?
因为刚才我们提到,要将每个track ID当作一个类别,但是这个track ID的数量十分庞大,甚至不可计数。这个输出节点应该如何设置呢?看了一圈代码,代码中设置了14455个输出节点,设置依据为训练集的总的Track ID数量。
那么实际上作者的结构图是进行了省略的,我们不妨手动补全。
注意:在Test的时候实际上是没有Embedding到14455的映射的,prediction head几乎没起什么作用
这样的话就没什么大的疑问了。有关YOLO V3的结构,熟悉目标检测的都不会陌生,我们这里忽略FPN网络的结构定义,直接看predicition head的代码部分,确定上面的分析是合理的。
该predicition head的代码定义在model.py文件下的 YOLOLayer类中。定义如下:
class YOLOLayer(nn.Module):
def __init__(self, anchors, nC, nID, nE, img_size, yolo_layer):
super(YOLOLayer, self).__init__()
self.layer = yolo_layer
nA = len(anchors)
self.anchors = torch.FloatTensor(anchors)
self.nA = nA # number of anchors (4)
print('nA',nA)
self.nC = nC # number of classes (1)
print('nC', nC)
self.nID = nID # number of identities, 14455
print('nID', nID)
self.img_size = 0
self.emb_dim = nE # 512
print('nE', nE)
self.shift = [1, 3, 5]
self.SmoothL1Loss = nn.SmoothL1Loss() # for bounding box regression
self.SoftmaxLoss = nn.CrossEntropyLoss(ignore_index=-1) # foreground and background classification
self.CrossEntropyLoss = nn.CrossEntropyLoss()
self.IDLoss = nn.CrossEntropyLoss(ignore_index=-1) # loss of embedding
self.s_c = nn.Parameter(-4.15*torch.ones(1)) # -4.15
self.s_r = nn.Parameter(-4.85*torch.ones(1)) # -4.85
self.s_id = nn.Parameter(-2.3*torch.ones(1)) # -2.3
self.emb_scale = math.sqrt(2) * math.log(self.nID-1) if self.nID>1 else 1
作者简单定义了一些参数和损失函数类型。我已经将一些参数的设定值标注在后面,便于大家理解。作者定义了四个损失函数,但是只用到了三个,分别为
- self.SmoothL1Loss 用于检测框的回归
- self.SoftmaxLoss 用于前景和背景分类
- self.IDLoss 用于计算embedding的损失
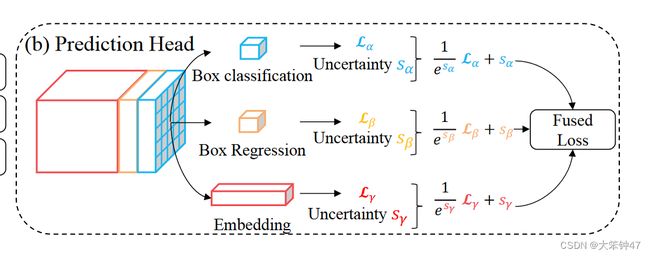
当然了,作者在论文中提到,JDE是一个多任务的学习,所以在计算损失函数的时候,需要采用任务独立不确定性(task-independent uncertainty)的自动学习方案进行以上三个损失函数的求和,有关参数在上述代码中已经定义,分别为
- self.s_c
- self.s_r
- self.s_id
这在上图中也有体现。该部分的核心代码如下
def forward(self, p_cat, img_size, targets=None, classifier=None, test_emb=False):
p, p_emb = p_cat[:, :24, ...], p_cat[:, 24:, ...]
nB, nGh, nGw = p.shape[0], p.shape[-2], p.shape[-1]
if self.img_size != img_size:
create_grids(self, img_size, nGh, nGw)
if p.is_cuda:
self.grid_xy = self.grid_xy.cuda()
self.anchor_wh = self.anchor_wh.cuda()
p = p.view(nB, self.nA, self.nC + 5, nGh, nGw).permute(0, 1, 3, 4, 2).contiguous() # prediction
p_emb = p_emb.permute(0,2,3,1).contiguous()
p_box = p[..., :4]
p_conf = p[..., 4:6].permute(0, 4, 1, 2, 3) # Conf
# Training
if targets is not None:
if test_emb:
tconf, tbox, tids = build_targets_max(targets, self.anchor_vec.cuda(), self.nA, self.nC, nGh, nGw)
else:
tconf, tbox, tids = build_targets_thres(targets, self.anchor_vec.cuda(), self.nA, self.nC, nGh, nGw)
tconf, tbox, tids = tconf.cuda(), tbox.cuda(), tids.cuda()
mask = tconf > 0
# Compute losses
nT = sum([len(x) for x in targets]) # number of targets
nM = mask.sum().float() # number of anchors (assigned to targets)
nP = torch.ones_like(mask).sum().float()
if nM > 0:
lbox = self.SmoothL1Loss(p_box[mask], tbox[mask])
else:
FT = torch.cuda.FloatTensor if p_conf.is_cuda else torch.FloatTensor
lbox, lconf = FT([0]), FT([0])
lconf = self.SoftmaxLoss(p_conf, tconf)
lid = torch.Tensor(1).fill_(0).squeeze().cuda()
emb_mask,_ = mask.max(1)
# For convenience we use max(1) to decide the id, TODO: more reseanable strategy
tids,_ = tids.max(1)
tids = tids[emb_mask]
embedding = p_emb[emb_mask].contiguous()
embedding = self.emb_scale * F.normalize(embedding)
nI = emb_mask.sum().float()
if test_emb:
if np.prod(embedding.shape)==0 or np.prod(tids.shape) == 0:
return torch.zeros(0, self.emb_dim+1).cuda()
emb_and_gt = torch.cat([embedding, tids.float()], dim=1)
return emb_and_gt
if len(embedding) > 1:
logits = classifier(embedding).contiguous()
lid = self.IDLoss(logits, tids.squeeze())
# Sum loss components
loss = torch.exp(-self.s_r)*lbox + torch.exp(-self.s_c)*lconf + torch.exp(-self.s_id)*lid + \
(self.s_r + self.s_c + self.s_id)
loss *= 0.5
return loss, loss.item(), lbox.item(), lconf.item(), lid.item(), nT
else:
p_conf = torch.softmax(p_conf, dim=1)[:,1,...].unsqueeze(-1)
p_emb = F.normalize(p_emb.unsqueeze(1).repeat(1,self.nA,1,1,1).contiguous(), dim=-1)
#p_emb_up = F.normalize(shift_tensor_vertically(p_emb, -self.shift[self.layer]), dim=-1)
#p_emb_down = F.normalize(shift_tensor_vertically(p_emb, self.shift[self.layer]), dim=-1)
p_cls = torch.zeros(nB,self.nA,nGh,nGw,1).cuda() # Temp
p = torch.cat([p_box, p_conf, p_cls, p_emb], dim=-1)
#p = torch.cat([p_box, p_conf, p_cls, p_emb, p_emb_up, p_emb_down], dim=-1)
p[..., :4] = decode_delta_map(p[..., :4], self.anchor_vec.to(p))
p[..., :4] *= self.stride
return p.view(nB, -1, p.shape[-1])
稍微有点冗长,我们来一一分析。
(1)前向预测信息的划分
首先作者将输出特征图划分为三部分,分别为
- 包含embedding信息的p_emb
- 包含检测框位置信息的p_box
- 包含前景背景分类置信度的p_conf
p_emb = p_emb.permute(0,2,3,1).contiguous()
p_box = p[..., :4]
p_conf = p[..., 4:6].permute(0, 4, 1, 2, 3) # Conf
这对应上图中的
(2)监督信息的划分
其次,作者从真实的标签信息中抽取各自的监督信息,分别为
# Training
if targets is not None:
if test_emb:
tconf, tbox, tids = build_targets_max(targets, self.anchor_vec.cuda(), self.nA, self.nC, nGh, nGw)
else:
tconf, tbox, tids = build_targets_thres(targets, self.anchor_vec.cuda(), self.nA, self.nC, nGh, nGw)
tconf, tbox, tids = tconf.cuda(), tbox.cuda(), tids.cuda()
mask = tconf > 0
因为我们知道,想要高效地进行损失函数求解,最好将监督信息对应到网络输出格式。其中tconf=1代表的是anchor中与GroundTruth目标物体最接近的框。注意在Test的时候,是需要对网络输出的框进行NMS(非极大值抑制)来避免重复框的。
(3)检测框回归损失和前景背景分类损失
接着作者计算检测框回归损失和前景背景分类损失。
# Compute losses
nT = sum([len(x) for x in targets]) # number of targets
nM = mask.sum().float() # number of anchors (assigned to targets)
nP = torch.ones_like(mask).sum().float()
if nM > 0:
lbox = self.SmoothL1Loss(p_box[mask], tbox[mask])
else:
FT = torch.cuda.FloatTensor if p_conf.is_cuda else torch.FloatTensor
lbox, lconf = FT([0]), FT([0])
lconf = self.SoftmaxLoss(p_conf, tconf)
lid = torch.Tensor(1).fill_(0).squeeze().cuda()
emb_mask,_ = mask.max(1)
这里值得注意的是mask的设置。作者将被分配为目标(targets)的anchor设置mask,那么只考虑被分配为targets的anchor对应位置上的值来计算损失函数。
(4)embedding损失的计算
接着作者计算embedding损失,值得注意的是,在该过程中作者采用了前面提到的全连结层来获得embedding的高级语义信息(track ID)。然后使用常见用于分类任务的交叉熵损失函数。
具体代码如下:
# For convenience we use max(1) to decide the id, TODO: more reseanable strategy
tids,_ = tids.max(1)
tids = tids[emb_mask]
embedding = p_emb[emb_mask].contiguous()
embedding = self.emb_scale * F.normalize(embedding)
nI = emb_mask.sum().float()
if test_emb:
if np.prod(embedding.shape)==0 or np.prod(tids.shape) == 0:
return torch.zeros(0, self.emb_dim+1).cuda()
emb_and_gt = torch.cat([embedding, tids.float()], dim=1)
return emb_and_gt
if len(embedding) > 1:
logits = classifier(embedding).contiguous()
lid = self.IDLoss(logits, tids.squeeze())
(5)总损失函数
最后,作者按照公式

对上面的三个损失进行求和。实现代码如下
loss = torch.exp(-self.s_r)*lbox + torch.exp(-self.s_c)*lconf + torch.exp(-self.s_id)*lid + \
(self.s_r + self.s_c + self.s_id)
loss *= 0.5
至此,有关predicition head的部分就讲解结束了。JDE的主体部分就介绍完了,其他细节,大家可以看一下原论文和代码,进行探索。
3 匹配
1.如何匹配
匹配是根据prediction head输出的embedding来进行匹配的。
2.变量说明
Tracks:表示一个被记录的物体(instance,同一个人)
Detections:表示当前帧中检测的是前景(比如人)的物体(会有对应的边框坐标和embedding)
不同状态的Tracks会有四个序列来分别进行存储:
-
Activated:表示当前帧中出现某个Tracks记录的人,则Tracks状态变为Activated
-
Refined:处于Lost状态的Tracks记录的人出现在当前帧
-
Lost:处于Lost状态的Tracks,但是并没有被删除(Remove)
-
Removed(删除):剔除序列的Tracks
3.匹配细则
当下一帧来到时,如何在处于Activated状态中的Tracks找到与其匹配的detection:
-
对处于Activated的Tracks,使用卡尔曼滤波预测物体当前帧的位置。
-
通过余弦相似性来计算Activated Tracks与Detections之间的appearance affinity matrix AE;通过马氏距离来计算Activated Tracks与Detections之间的motion affinity matrix AM。综合AE和AM得到最终的Cost Matrix,通过使用匈牙利算法来根据cost matrix进行Track与detection间的最佳匹配。
-
对于匹配到的且处于Activated 状态的Tracks,状态依旧处于Activated;对于新的detections,则新建一个处于Activated的Track;对于处于Lost状态的Tracks将重新处于Refined状态。
-
对于匹配失败的Track,则采用IOU距离度量指标重新进行匹配。
-
在IOU距离匹配下:匹配成功的Tracks处于Activated状态,失败的处于Lost状态。
关于匹配的详细代码:
class JDETracker(object):
def __init__(self, opt, frame_rate=30):
self.opt = opt
self.model = Darknet(opt.cfg, nID=14455)
# load_darknet_weights(self.model, opt.weights)
self.model.load_state_dict(torch.load(opt.weights, map_location='cpu')['model'], strict=False)
self.model.cuda().eval()
self.tracked_stracks = [] # type: list[STrack]
self.lost_stracks = [] # type: list[STrack]
self.removed_stracks = [] # type: list[STrack]
self.frame_id = 0
self.det_thresh = opt.conf_thres
self.buffer_size = int(frame_rate / 30.0 * opt.track_buffer)
self.max_time_lost = self.buffer_size
self.kalman_filter = KalmanFilter()
def update(self, im_blob, img0):
"""
Processes the image frame and finds bounding box(detections).
Associates the detection with corresponding tracklets and also handles lost, removed, refound and active tracklets
Parameters
----------
im_blob : torch.float32
Tensor of shape depending upon the size of image. By default, shape of this tensor is [1, 3, 608, 1088]
img0 : ndarray
ndarray of shape depending on the input image sequence. By default, shape is [608, 1080, 3]
Returns
-------
output_stracks : list of Strack(instances)
The list contains information regarding the online_tracklets for the recieved image tensor.
"""
# 定义不同的序列存放不同的frame
self.frame_id += 1
activated_starcks = [] # for storing active tracks, for the current frame
refind_stracks = [] # Lost Tracks whose detections are obtained in the current frame
lost_stracks = [] # The tracks which are not obtained in the current frame but are not removed.(Lost for some time lesser than the threshold for removing)
removed_stracks = []
t1 = time.time()
''' Step 1: Network forward, get detections & embeddings'''
with torch.no_grad():
pred = self.model(im_blob)
# pred is tensor of all the proposals (default number of proposals: 54264). Proposals have information associated with the bounding box and embeddings
pred = pred[pred[:, :, 4] > self.opt.conf_thres]
# pred now has lesser number of proposals. Proposals rejected on basis of object confidence score
if len(pred) > 0:
dets = non_max_suppression(pred.unsqueeze(0), self.opt.conf_thres, self.opt.nms_thres)[0].cpu()
# Final proposals are obtained in dets. Information of bounding box and embeddings also included
# Next step changes the detection scales
scale_coords(self.opt.img_size, dets[:, :4], img0.shape).round()
'''Detections is list of (x1, y1, x2, y2, object_conf, class_score, class_pred)'''
# class_pred is the embeddings.
detections = [STrack(STrack.tlbr_to_tlwh(tlbrs[:4]), tlbrs[4], f.numpy(), 30) for
(tlbrs, f) in zip(dets[:, :5], dets[:, 6:])]
else:
detections = []
t2 = time.time()
# print('Forward: {} s'.format(t2-t1))
''' Add newly detected tracklets to tracked_stracks'''
unconfirmed = []
tracked_stracks = [] # type: list[STrack]
for track in self.tracked_stracks:
if not track.is_activated:
# previous tracks which are not active in the current frame are added in unconfirmed list
unconfirmed.append(track)
# print("Should not be here, in unconfirmed")
else:
# Active tracks are added to the local list 'tracked_stracks'
tracked_stracks.append(track)
''' Step 2: First association, with embedding'''
# Combining currently tracked_stracks and lost_stracks
strack_pool = joint_stracks(tracked_stracks, self.lost_stracks)
# Predict the current location with KF 运用卡尔曼滤波进行motion state的更新
STrack.multi_predict(strack_pool, self.kalman_filter)
# appearance affinity matrix
dists = matching.embedding_distance(strack_pool, detections)
# dists = matching.gate_cost_matrix(self.kalman_filter, dists, strack_pool, detections)
# motion affinity matrix
dists = matching.fuse_motion(self.kalman_filter, dists, strack_pool, detections)
# The dists is the list of distances of the detection with the tracks in strack_pool
# 匈牙利算法做匹配
matches, u_track, u_detection = matching.linear_assignment(dists, thresh=0.7)
# The matches is the array for corresponding matches of the detection with the corresponding strack_pool
for itracked, idet in matches:
# itracked is the id of the track and idet is the detection
track = strack_pool[itracked]
det = detections[idet]
if track.state == TrackState.Tracked:
# If the track is active, add the detection to the track
track.update(detections[idet], self.frame_id)
activated_starcks.append(track)
else:
# We have obtained a detection from a track which is not active, hence put the track in refind_stracks list
track.re_activate(det, self.frame_id, new_id=False)
refind_stracks.append(track)
# None of the steps below happen if there are no undetected tracks.
''' Step 3: Second association, with IOU'''
detections = [detections[i] for i in u_detection]
# detections is now a list of the unmatched detections
r_tracked_stracks = [] # This is container for stracks which were tracked till the
# previous frame but no detection was found for it in the current frame
for i in u_track:
if strack_pool[i].state == TrackState.Tracked:
r_tracked_stracks.append(strack_pool[i])
dists = matching.iou_distance(r_tracked_stracks, detections)
matches, u_track, u_detection = matching.linear_assignment(dists, thresh=0.5)
# matches is the list of detections which matched with corresponding tracks by IOU distance method
for itracked, idet in matches:
track = r_tracked_stracks[itracked]
det = detections[idet]
if track.state == TrackState.Tracked:
track.update(det, self.frame_id)
activated_starcks.append(track)
else:
track.re_activate(det, self.frame_id, new_id=False)
refind_stracks.append(track)
# Same process done for some unmatched detections, but now considering IOU_distance as measure
for it in u_track:
track = r_tracked_stracks[it]
if not track.state == TrackState.Lost:
track.mark_lost()
lost_stracks.append(track)
# If no detections are obtained for tracks (u_track), the tracks are added to lost_tracks list and are marked lost
'''Deal with unconfirmed tracks, usually tracks with only one beginning frame'''
detections = [detections[i] for i in u_detection]
dists = matching.iou_distance(unconfirmed, detections)
matches, u_unconfirmed, u_detection = matching.linear_assignment(dists, thresh=0.7)
for itracked, idet in matches:
unconfirmed[itracked].update(detections[idet], self.frame_id)
activated_starcks.append(unconfirmed[itracked])
# The tracks which are yet not matched
for it in u_unconfirmed:
track = unconfirmed[it]
track.mark_removed()
removed_stracks.append(track)
# after all these confirmation steps, if a new detection is found, it is initialized for a new track
""" Step 4: Init new stracks"""
for inew in u_detection:
track = detections[inew]
if track.score < self.det_thresh:
continue
track.activate(self.kalman_filter, self.frame_id)
activated_starcks.append(track)
""" Step 5: Update state"""
# If the tracks are lost for more frames than the threshold number, the tracks are removed.
for track in self.lost_stracks:
if self.frame_id - track.end_frame > self.max_time_lost:
track.mark_removed()
removed_stracks.append(track)
# print('Remained match {} s'.format(t4-t3))
# Update the self.tracked_stracks and self.lost_stracks using the updates in this step.
self.tracked_stracks = [t for t in self.tracked_stracks if t.state == TrackState.Tracked]
self.tracked_stracks = joint_stracks(self.tracked_stracks, activated_starcks)
self.tracked_stracks = joint_stracks(self.tracked_stracks, refind_stracks)
# self.lost_stracks = [t for t in self.lost_stracks if t.state == TrackState.Lost] # type: list[STrack]
self.lost_stracks = sub_stracks(self.lost_stracks, self.tracked_stracks)
self.lost_stracks.extend(lost_stracks)
self.lost_stracks = sub_stracks(self.lost_stracks, self.removed_stracks)
self.removed_stracks.extend(removed_stracks)
self.tracked_stracks, self.lost_stracks = remove_duplicate_stracks(self.tracked_stracks, self.lost_stracks)
# get scores of lost tracks
output_stracks = [track for track in self.tracked_stracks if track.is_activated]
logger.debug('===========Frame {}=========='.format(self.frame_id))
logger.debug('Activated: {}'.format([track.track_id for track in activated_starcks]))
logger.debug('Refind: {}'.format([track.track_id for track in refind_stracks]))
logger.debug('Lost: {}'.format([track.track_id for track in lost_stracks]))
logger.debug('Removed: {}'.format([track.track_id for track in removed_stracks]))
# print('Final {} s'.format(t5-t4))
return output_stracks
上述代码中的step与匹配细则相对应。
4 总结
tracking by detection是非常常见的MOT范式,但是目前MOT领域为了平衡追踪速度和精度,慢慢放弃了这种范式,转而投入将检测与embedding匹配进行结合的范式研究中。本文介绍的JDE就是一个网络同时输出图像画面中的检测框位置和检测框内物体的embedding,从而加速MOT的速度。
但是值得注意的是,JDE只是同时输出了检测框和embedding信息。后面还是要通过卡尔曼滤波和匈牙利算法进行目标的匹配。总的来说,还是分为检测和匹配双阶段。
5 参考
参考代码:
[1]https://github.com/Zhongdao/Towards-Realtime-MOT
[2]https://zhuanlan.zhihu.com/p/243290960