yolov7基于python 的onnx推理
yolov7 基于python 的onnx推理,本文主要以 bubbliiiing 的版本的yolov7进行推理
话不多说,直接上代码
# coding=utf-8
"""
role : yolov7 onnx inference
"""
import colorsys
import glob
import os
import cv2
import numpy as np
import onnxruntime
import torch
import torchvision
import time
import random
class YOLOV7_ONNX(object):
def __init__(self,onnx_path):
'''initialization onnx'''
self.onnx_session=onnxruntime.InferenceSession(onnx_path)
self.input_name=self.get_input_name()
self.output_name=self.get_output_name()
def get_input_name(self):
'''git input name'''
input_name=[]
for node in self.onnx_session.get_inputs():
input_name.append(node.name)
return input_name
def get_output_name(self):
'''git output name'''
output_name=[]
for node in self.onnx_session.get_outputs():
output_name.append(node.name)
return output_name
def get_input_feed(self,image_tensor):
'''git input tensor'''
input_feed={}
for name in self.input_name:
input_feed[name]=image_tensor
return input_feed
def letterbox(self,img, new_shape=(640, 640), color=(114, 114, 114), auto=False, scaleFill=False, scaleup=True,
stride=32):
'''Image normalization'''
# Resize and pad image while meeting stride-multiple constraints
shape = img.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
if not scaleup: # only scale down, do not scale up (for better test mAP)
r = min(r, 1.0)
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
if auto: # minimum rectangle
dw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh padding
elif scaleFill: # stretch
dw, dh = 0.0, 0.0
new_unpad = (new_shape[1], new_shape[0])
ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratios
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return img, ratio, (dw, dh)
def xywh2xyxy(self,x):
# Convert nx4 boxes from [x, y, w, h] to [x1, y1, x2, y2] where xy1=top-left, xy2=bottom-right
y = np.copy(x)
y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
return y
def nms(self,prediction, conf_thres=0.1, iou_thres=0.6, agnostic=False):
if prediction.dtype is torch.float16:
prediction = prediction.float() # to FP32
xc = prediction[..., 4] > conf_thres # candidates
min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
max_det = 300 # maximum number of detections per image
output = [None] * prediction.shape[0]
for xi, x in enumerate(prediction): # image index, image inference
x = x[xc[xi]] # confidence
if not x.shape[0]:
continue
x[:, 5:] *= x[:, 4:5] # conf = obj_conf * cls_conf
box = self.xywh2xyxy(x[:, :4])
conf, j = x[:, 5:].max(1, keepdim=True)
x = torch.cat((torch.tensor(box), conf, j.float()), 1)[conf.view(-1) > conf_thres]
n = x.shape[0] # number of boxes
if not n:
continue
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
i = torchvision.ops.boxes.nms(boxes, scores, iou_thres)
if i.shape[0] > max_det: # limit detections
i = i[:max_det]
output[xi] = x[i]
return output
def clip_coords(self,boxes, img_shape):
'''Check whether the boundary is crossed'''
# Clip bounding xyxy bounding boxes to image shape (height, width)
boxes[:, 0].clamp_(0, img_shape[1]) # x1
boxes[:, 1].clamp_(0, img_shape[0]) # y1
boxes[:, 2].clamp_(0, img_shape[1]) # x2
boxes[:, 3].clamp_(0, img_shape[0]) # y2
def scale_coords(self,img1_shape, coords, img0_shape, ratio_pad=None):
# Rescale coords (xyxy) from img1_shape to img0_shape
if ratio_pad is None: # calculate from img0_shape
gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (
img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
else:
gain = ratio_pad[0][0]
pad = ratio_pad[1]
coords[:, [0, 2]] -= pad[0] # x padding
coords[:, [1, 3]] -= pad[1] # y padding
coords[:, :4] /= gain
self.clip_coords(coords, img0_shape)
return coords
def sigmoid(self,x):
return 1 / (1 + np.exp(-x))
def get_classes(self,classes_txt_path):
with open(classes_txt_path, encoding='utf-8') as f:
class_names = f.readlines()
class_names = [c.strip() for c in class_names]
return class_names, len(class_names)
def infer(self,img_path,classes_txt,img_name,iou_thres,conf_thres,anchor_list):
# Hyperparameter setting
img_size=(640,640)
class_name,class_num = self.get_classes(classes_txt)
hsv_tuples = [(x / class_num, 1., 1.) for x in range(class_num)]
colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples))
colors = list(map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)), colors))
anchor = np.array(anchor_list).astype(np.float64).reshape(3,-1,2)
stride = [8, 16, 32]
area = img_size[0] * img_size[1]
size = [int(area / stride[0] ** 2), int(area / stride[1] ** 2), int(area / stride[2] ** 2)]
feature = [[int(j / stride[i]) for j in img_size] for i in range(3)]
# Read pictures
src_img=cv2.imread(img_path)
src_size=src_img.shape[:2]
# Images are filled and normalized
img=self.letterbox(src_img,img_size,stride=32)[0]
# Convert
img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
img = np.ascontiguousarray(img)
# normalized
img=img.astype(dtype=np.float32)
img/=255.0
# dimension expansion
img=np.expand_dims(img,axis=0)
# forward reasoning
start=time.time()
input_feed=self.get_input_feed(img)
pred=self.onnx_session.run(output_names=self.output_name,input_feed=input_feed)
# extract features
y = []
y.append(torch.tensor(pred[2].reshape(1, 3, 5 + class_num, 80, 80)).permute(0,1,3,4,2).reshape(-1, size[0] * 3, 5 + class_num).sigmoid())
y.append(torch.tensor(pred[1].reshape(1, 3, 5 + class_num, 40, 40)).permute(0,1,3,4,2).reshape(-1, size[1] * 3, 5 + class_num).sigmoid())
y.append(torch.tensor(pred[0].reshape(1, 3, 5 + class_num, 20, 20)).permute(0,1,3,4,2).reshape(-1, size[2] * 3, 5 + class_num).sigmoid())
grid = []
for k, f in enumerate(feature):
grid.append([[i, j] for j in range(f[0]) for i in range(f[1])])
z = []
for i in range(3):
src = y[i]
xy = src[..., 0:2] * 2. - 0.5
wh = (src[..., 2:4] * 2) ** 2
dst_xy = []
dst_wh = []
for j in range(3):
dst_xy.append((xy[:, j * size[i]:(j + 1) * size[i], :] + torch.tensor(grid[i])) * stride[i])
dst_wh.append(wh[:, j * size[i]:(j + 1) * size[i], :] * anchor[i][j])
src[..., 0:2] = torch.from_numpy(np.concatenate((dst_xy[0], dst_xy[1], dst_xy[2]), axis=1))
src[..., 2:4] = torch.from_numpy(np.concatenate((dst_wh[0], dst_wh[1], dst_wh[2]), axis=1))
z.append(src.view(1, -1, 5+class_num))
results = torch.cat(z, 1)
results = self.nms(results, conf_thres, iou_thres)
cast=time.time()-start
print("cast time:{}".format(cast))
# Map to the original image
img_shape=img.shape[2:]
for det in results: # detections per image
if det is not None and len(det):
det[:, :4] = self.scale_coords(img_shape, det[:, :4],src_size).round()
if det is not None and len(det):
self.draw(src_img, det,img_name,output_results_dir,class_name,colors)
def plot_one_box(self,x, img, color=None, label=None,conf = None, line_thickness=None):
# Plots one bounding box on image img
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
information = label + " " + conf
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(information, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(img, information, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
def draw(self,img, boxinfo, img_name, output_results_dir,class_name,colors):
for *xyxy, conf, cls in boxinfo:
label = str(class_name[int(cls)])
conf = str(format(float(conf),".4f"))
self.plot_one_box(xyxy, img, label=label,conf = conf, color=colors[int(cls)], line_thickness=2)
# show and save image
# cv2.namedWindow("dst",0)
# cv2.imshow("dst", img)
# cv2.waitKey(0)
cv2.imwrite(os.path.join(output_results_dir, img_name), img)
return 0
if __name__=="__main__":
onnx_path = r"model_data/models.onnx" # Into the model
img_dir = r"img" # Import the directory of the picture you want to reason about
output_results_dir = r"./" # Where you want the output image to be saved
classes_txt = "model_data/coco_classes.txt" # contain classes name txt
iou_thres = 0.2
conf_thres = 0.3
anchor_list = [[12, 16, 19, 36, 40, 28],[36, 75, 76, 55, 72, 146],[142, 110, 192, 243, 459, 401]]
if os.path.isdir(output_results_dir) == False:
os.mkdir(output_results_dir)
img_list = glob.glob(os.path.join(img_dir, "*.jpg"))
model = YOLOV7_ONNX(onnx_path=onnx_path)
for img_path in img_list:
img_name = img_path.split("\\")[-1]
model.infer(img_path=img_path,classes_txt=classes_txt,img_name=img_name,iou_thres=iou_thres,conf_thres=conf_thres,anchor_list=anchor_list)需要注意的是,在转onnx过程中,不需要改动 nets\yolo.py 文件的东西,导出onnx文件后,把路径给正确便可以进行onnx推理了。
用到的权重文件是bubbliiiing大佬百度网盘中下载的 yolov7_weights.pth 转化为onnx后的文件,其余权重未做尝试,本文仅做onnx推理举例。
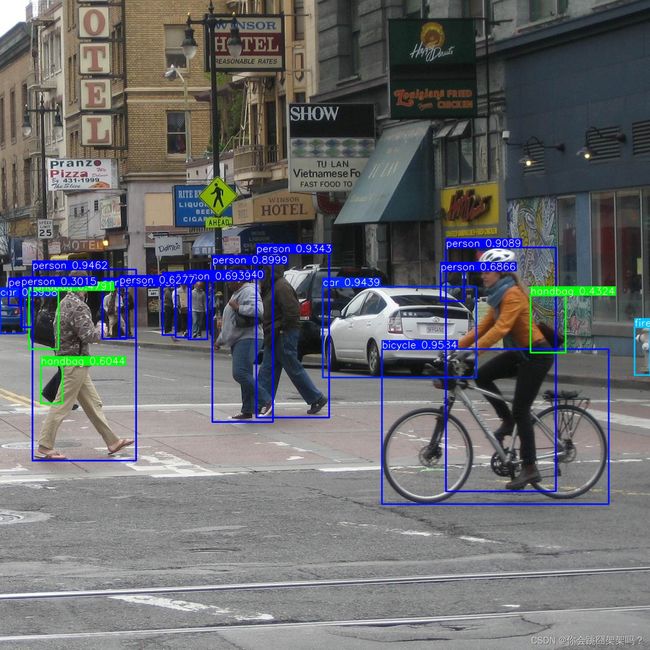
最终推理得到的图片:
时长:
![]()