ORB-SLAM2+Ubuntu18.04配置与运行
1.基础工具
sudo apt-get install git
sudo apt-get install cmake
sudo apt-get install g++ gcc2.安装所需依赖
1.Pangolin0.5
0.5版本可以避免Eigen3的依赖错误,下载链接:Pangolin0.5-C++文档类资源-CSDN下载Pangolin0.5更多下载资源、学习资料请访问CSDN下载频道.https://download.csdn.net/download/w_fla/85345297
cd Pangolion
mkdir build && cd build
cmake ..
make -j8
sudo make installPangolin测试:cd Pangolin/examples/HelloPangolin, mkdir build && cd build, cmake .., make, ./HelloPangolin。
2.Opencv3.2
ubuntu18.04默认安装,可忽略该步骤。
3.安装Eigen
sudo apt install libeigen3-dev3.下载ORB-SLAM2与编译
git clone https://github.com/raulmur/ORB_SLAM2.git
cd ORB-SLAM2
chmod +x build.shbuild.sh文件修改如下:
echo "Configuring and building Thirdparty/DBoW2 ..."
cd Thirdparty/DBoW2
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j8cd ../../g2o
echo "Configuring and building Thirdparty/g2o ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j8cd ../../../
echo "Uncompress vocabulary ..."
cd Vocabulary
tar -xf ORBvoc.txt.tar.gz
cd ..echo "Configuring and building ORB_SLAM2 ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j8
在下列文件中添加#include
src/LocalMapping.cc,src/System.cc,src/LoopClosing.cc,src/Tracking.cc,src/Viewer.cc,Examples/Monocular/mono_tum.cc,Examples/Monocular/mono_kitti.cc,Examples/Monocular/mono_curoc.cc,Examples/RGB_D/rgbd_tum.cc,Examples/Stereo/stereo_kitti.cc,Examples/Stereo/stereo_curoc.cc。
编译:./build.sh
4.测试
在ORB-SLAM2文件夹下新建Data文件夹,下载https://vision.in.tum.de/rgbd/dataset/freiburg1/rgbd_dataset_freiburg1_xyz.tgz
解压到Data文件夹下。
cd ORB-SLAM2安装目录
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/cular/TUM1.yaml ./Data/rgbd_dataset_freiburg1_xyz
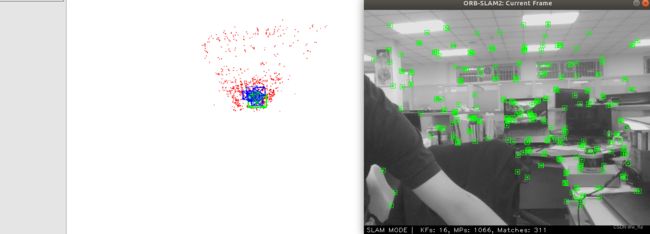
5.ORB_SLAM2运行自己的USB摄像头(单目)
准备工作: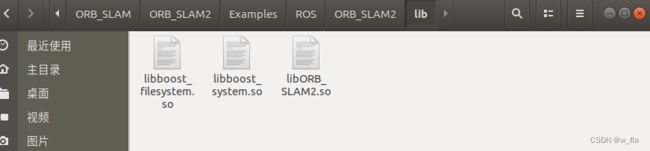
这三个.so文件一定要在该目录下存在,可用下面方式找到文件路径复制过来。
cmakelist.txt修改:set中添加最后两行

1.编译build_ros.sh
sudo gedit ~/.bashrc
//末尾添加代码段如下
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/自己的目录/ORB_SLAM2/Examples/ROS
source ~/.bashrc
echo $ROS_PACKAGE_PATH//检验 ROS path 是否被识别
出现结果:/home/wl/ORB_SLAM/ORB_SLAM2/Examples/ROS表示成功
注:在这里不建议直接使用build_ros.sh直接编译,在/Examples/ROS文件夹终端下运行下列指令:
mkdir build && cd build
cmake ..
make2.USB摄像头标定
首先下载usb摄像头驱动:
cd catkin_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git
cd ..
catkin_make usb_cam-test.launch文件:
//这里/dev/video0表示打开笔记本摄像头,/dev/video1打开自己外接的摄像头,根据自己需要修改
下载usb摄像头标定包进行标定:参考博客ROS系统-摄像头标定camera calibration_berry丶的博客-CSDN博客_ros标定摄像头 https://blog.csdn.net/zbr794866300/article/details/94862108
https://blog.csdn.net/zbr794866300/article/details/94862108
3.文件修改
1.ros::Subscriber sub = nodeHandler.subscribe("/usb_cam/image_raw", 1, &ImageGrabber::GrabImage,&igb);
/usb_cam/image_raw为使用的摄像头节点,可用rostopic list查看。
2.在该图中新建my.yaml,内容如下:
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------# Camera calibration and distortion parameters (OpenCV)
Camera.fx: 613.34257
Camera.fy: 609.97127
Camera.cx: 353.59088
Camera.cy: 209.10541Camera.k1: -0.204398
Camera.k2: 0.371587
Camera.p1: -0.004708
Camera.p2: 0.008199Camera.width: 640
Camera.height: 480 #该部分为上一步标定结果的参数对应Asus.yaml文件格式改写# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1# Close/Far threshold. Baseline times.
ThDepth: 40.0# Deptmap values factor
DepthMapFactor: 1.0#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
4.测试
roslaunch usb_cam usb_cam-test.launch
rosrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/my.yaml//在ORB_SLAM2路径终端下运行