小生镜粒子群优化算法-附代码
小生镜粒子群优化算法-附代码
文章目录
- 小生镜粒子群优化算法-附代码
-
- 1.粒子群优化算法
- 2. 小生镜粒子群优化算法
- 3.实验结果
- 4.参考文献
- 5.Matlab代码
- 6.Python代码
摘要:针对粒子群算法容易早熟收敛和后期收敛速度慢的缺点, 结合进化论中小生境技术, 提出了小生境粒子群优化算法。通过粒子之间的距离找到具有相似距离的粒子个体组成小生境种群, 然后在该种群里面利用粒子群优化算法进化粒子, 所有个体经过其小生境群体的进化之后, 找到最优的个体存入到下一代的粒子群中, 直到找到满意的适应值为止。
1.粒子群优化算法
基础粒子群算法的具体原理参考网络博客
v i d ( t + 1 ) = ω ∗ v i d ( t ) + α ∗ rand ( ) ∗ ( p i , d − x i d ( t ) ) + β ∗ rand ( ) ∗ ( p g , d x i d ( t ) ) ( 1 ) x i d ( t + 1 ) = x i d ( t ) + v i d ( t + 1 ) ( 2 ) \begin{aligned} & \mathrm{v}_{\mathrm{id}}(\mathrm{t}+1)= \omega^* \mathrm{v}_{\mathrm{id}}(\mathrm{t})+\alpha^* \operatorname{rand}()^*\left(\mathrm{p}_{\mathrm{i}, \mathrm{d}}-\mathrm{x}_{\mathrm{id}}(\mathrm{t})\right)+\beta^* \operatorname{rand}() *\left(\mathrm{p}_{\mathrm{g}, \mathrm{d}} \mathrm{x}_{\mathrm{id}}(\mathrm{t})\right) (1)\\ & \mathrm{x}_{\mathrm{id}}(\mathrm{t}+1)=\mathrm{x}_{\mathrm{id}}(\mathrm{t})+\mathrm{v}_{\mathrm{id}}(\mathrm{t}+1)(2) \end{aligned} vid(t+1)=ω∗vid(t)+α∗rand()∗(pi,d−xid(t))+β∗rand()∗(pg,dxid(t))(1)xid(t+1)=xid(t)+vid(t+1)(2)
2. 小生镜粒子群优化算法
进化论中小生境概念指生物在特定环境下的生存环境 这 概念的主要思想是 “以群分, 物以类聚”, 即反映了在大自然 的进化过程中, 各种生物在特定环境下生存, 同种生物中存在 着优秀的生物, 各生物之间存在着相互竞争, 不同种生物之间 又存在着信息交换。资源共享”体现了在特定环境中共同生存 的同种生物分享有限的资源, 这些生物之间通过相互协调达到 共同进化, 对于适应环境能力弱的生物, 在资源不足的前提下, 将会逐渐被淘汰 。
在小生境粒子群算法中, 主要分为两个阶段, 第一个阶段 由小生境技术根据粒子之间矩离找到每个粒子的小生境群体, 然后在每个小生境群体中利用粒子群算法进行速度和位置更 新, 其中粒子群的群体最优值仅在该小生境群体中起作用。对 于更新后的群体, 根据粒子间的距离, 利用共享机制提高粒子 的适应度, 对于适应度最低的个体, 利用罚函数进行处罚相应的 粒子。最后保留每个粒子的群体最优个体, 直到满足终止条件。
(1) 小生境群体的划分
对于粒子 X i = ( x i , x i , ⋯ , x i m ) , i = 1 , 2 , ⋯ , N \mathrm{X}_{\mathrm{i}}=\left(\mathrm{x}_{\mathrm{i}}, \mathrm{x}_{\mathrm{i}}, \cdots, \mathrm{x}_{\mathrm{im}}\right), \mathrm{i}=1,2, \cdots, \mathrm{N} Xi=(xi,xi,⋯,xim),i=1,2,⋯,N, 它的小生境群 体是计算该粒子与其他粒子之间的范数。
d i k = ∥ X i − X k ∥ , k = 1 , 2 , ⋯ , N (3) \mathrm{d}_{\mathrm{ik}}=\left\|\mathrm{X}_{\mathrm{i}}-\mathrm{X}_{\mathrm{k}}\right\|, \mathrm{k}=1,2, \cdots, \mathrm{N}\tag{3} dik=∥Xi−Xk∥,k=1,2,⋯,N(3)
对于给定参数 σ 0 \sigma_0 σ0, 如果 d k < σ 0 , k = 1 , 2 , ⋯ , N \mathrm{d}_{\mathrm{k}}<\sigma_0, \mathrm{k}=1,2, \cdots, \mathrm{N} dk<σ0,k=1,2,⋯,N, 则该个体加 入到该小生境群体 X p , \mathrm{X}_{\mathrm{p},} Xp,, 这里范数一般对于实值函数取为欧式 距离
(2) 粒子之间的共享函数
粒子 i \mathrm{i} i 和粒子 j \mathrm{j} j 之间的共享函数为:
Shd i j = { 1 d i j = 0 1 − ( d i j σ 0 ) λ d i j < σ 0 0 否则 (4) \operatorname{Shd}_{\mathrm{ij}}=\left\{\begin{array}{cc} 1 & \mathrm{~d}_{\mathrm{ij}}=0 \\ 1-\left(\frac{\mathrm{d}_{\mathrm{ij}}}{\sigma_0}\right)^\lambda & \mathrm{d}_{\mathrm{ij}}<\sigma_0 \\ 0 & \text { 否则 } \end{array}\right. \tag{4} Shdij=⎩ ⎨ ⎧11−(σ0dij)λ0 dij=0dij<σ0 否则 (4)
λ \lambda λ 为控制共享函数形状的参数。
(3) 适应值函数的更新 根据共享机制函数更新该粒子的适应值:
f j ′ = f j m (5) f_j^{\prime}=\frac{f_j}{m} \tag{5} fj′=mfj(5) { }
其中 m = ∑ s = i i + p − 1 S j h j s , j = i , i + 1 , ⋯ , i + p i − 1 ( 6 ) m=\sum_{s=i}^{i+p-1} S_j h_{j s}, j=i, i+1, \cdots, i+p_i-1(6) m=∑s=ii+p−1Sjhjs,j=i,i+1,⋯,i+pi−1(6)
具体的算法流程:
步骤 1 初始化粒子群体为 X = { X 1 , X 2 , ⋯ , X N } \mathrm{X}=\left\{\mathrm{X}_1, \mathrm{X}_2, \cdots, \mathrm{X}_{\mathrm{N}}\right\} X={X1,X2,⋯,XN}, 其中每个粒 子个体为 X i = ( x 1 , x 2 , ⋯ , x m ) , i = 1 , 2 , ⋯ , N X_i=\left(x_1, x_2, \cdots, x_m\right), i=1,2, \cdots, N Xi=(x1,x2,⋯,xm),i=1,2,⋯,N;
步骤 2 按下列步骤确定小生境种群个体:
(2.1) 置 i = 1 \mathrm{i}=1 i=1;
(2.2) 计算两个粒子个体的距离按照式(3) 计算;
(2.3) 根据 d i k < σ 0 , k = i , i + 1 , ⋯ , N \mathrm{d}_{\mathrm{ik}}<\sigma_0, \mathrm{k}=\mathrm{i}, \mathrm{i}+1, \cdots, \mathrm{N} dik<σ0,k=i,i+1,⋯,N, 确定小生境子群 X p i , p i \mathrm{X}_{\mathrm{p}_{\mathrm{i}}}, \mathrm{p}_{\mathrm{i}} Xpi,pi 为 X p i \mathrm{X}_{\mathrm{p}_{\mathrm{i}}} Xpi 的元素个数, 其中 σ 0 \sigma_0 σ0 依据问题(NFP) 而定;
步骤 3 按照粒子群算法对小生境群体进行速度和适应度 更新:
(3.1) 设置加速常数 α \alpha α 和 β \beta β, 最大进化代数 T p 1 \mathrm{T}_{p_1} Tp1, 当前进化代 数置为 T = 1 \mathrm{T}=1 T=1, 并且每初始化每个粒子的速度, 其粒子初始最优 位置为粒子自身;
(3.2) 按照方程 (1) 和 (2) 进行粒子位置和速度更新。其中 群体最优值为小生境群体的最优值, 不再是整个群体的最优值;
(3.3) 检查条件, 对于更新后的个体 X p i ′ \mathrm{X}_{\mathrm{p}_{\mathrm{i}}}{ }^{\prime} Xpi′, 按照式(5) 对 X p i \mathrm{X}_{\mathrm{p}_{\mathrm{i}}} Xpi 中的第 j \mathrm{j} j 个粒子进行速度和位置更新个体的更新适应度;
(3.4) 利用更新适应度 f j ′ \mathrm{f}_{\mathrm{j}}^{\prime} fj′ 及处罚函数 Penalty 对该子群中 低适应度的粒子进行处罚, 即当 x j , x k ∈ M p i , ∥ x j − x k ∣ ∣ < L , L < σ \mathrm{x}_{\mathrm{j}}, \mathrm{x}_{\mathrm{k}} \in \mathrm{M}_{\mathrm{p}_{\mathrm{i}}}, \| \mathrm{x}_{\mathrm{j}}-\mathrm{x}_{\mathrm{k}}||<\mathrm{L}, \mathrm{L}<\sigma xj,xk∈Mpi,∥xj−xk∣∣<L,L<σ 时, 比较两个粒子的距离, 并对其中适应度较低的粒子进行处罚:
f min ( x j , x k ) = Penalty, j , k = i , i + 1 , ⋯ , i + p i − 1 \mathrm{f}_{\min }\left(\mathrm{x}_{\mathrm{j}}, \mathrm{x}_{\mathrm{k}}\right)=\text { Penalty, } \mathrm{j}, \mathrm{k}=\mathrm{i}, \mathrm{i}+1, \cdots, \mathrm{i}+\mathrm{p}_{\mathrm{i}}-1 fmin(xj,xk)= Penalty, j,k=i,i+1,⋯,i+pi−1
(3.5) 当 i + p i < N i+p_i
步骤 4 计算每个粒子的适应值, 保留最优的适应值和个 体, 检查是否达到优化条件, 如果达到误差精度, 则结束。否则, 然后进入下一个粒子的小生境群体进行优化;
步骤 5 若没有找到最优值, 则对每个粒子的小生境群体 保留的最优个体组成新的群体空间, 重复步骤 2。
以上算法通过利用粒子间的距离划分每个粒子的小生境 群体, 然后在小生境群体内利用粒子群算法的进化机理对群体 内的每个粒子进行更新。对于更新后的群体, 利用共享机制算 法对适应值进行更新, 对于适应度最低的粒子利用处罚函数进 行处罚。
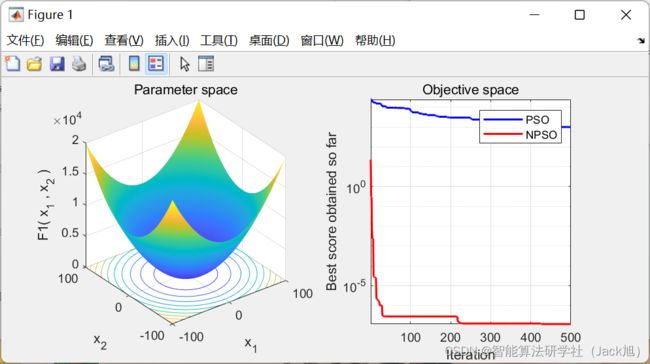
3.实验结果
4.参考文献
[1]向长城,黄席樾,杨祖元,杨欣.小生境粒子群优化算法[J].计算机工程与应用,2007(15):41-43.