pytorch从零实现resnet50
pytorch从零实现resnet_pytorch实现resnet_两只蜡笔的小新的博客-CSDN博客
前言:
之前博主写过一个ResNet34, ResNet18的实现方法,对于ResNet50的实现方法有点不太一样,之前的实现方法参考上面的链接。下面介绍ResNet50的实现方法。
基本结构示意图
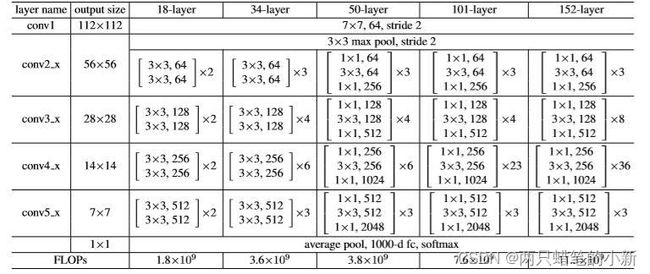
发现ResNet50,其基本模块是三个,1*1 3*3 1*1 的卷积层,在向前推进的时候,需要特征图的通道数降维,所以与ResNet34不同的地方是BasicBlock,和make_layer
二、构建BasicBlock
import torch
import torch.nn as nn
import torch.nn.functional as F
# 定义残差块
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1, downsample=None):
super(ResidualBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=1, padding=0, bias=False)
self.bn1 = nn.BatchNorm2d(out_channels)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channels)
self.conv3 = nn.Conv2d(out_channels, out_channels * 4, kernel_size=1, stride=1, padding=0, bias=False)
self.bn3 = nn.BatchNorm2d(out_channels * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out三、残差块的实现,
由于renset残差单元可能连接两个不同维度的特征图,所以要接一个降采样操作self.downsample = shortcut,有没有取决于输入维度与输出维度是否相同,还取决于特征图的尺寸是否发生变化。
def _make_layer(self, out_channels, blocks, stride=1):
downsample = None
if stride != 1 or 64 != out_channels * 4:
downsample = nn.Sequential(
nn.Conv2d(64, out_channels * 4, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels * 4)
)
layers = []
layers.append(ResidualBlock(64, out_channels, stride, downsample))
for i in range(1, blocks):
layers.append(ResidualBlock(out_channels * 4, out_channels))
return nn.Sequential(*layers)四、下面构造类class ResNet50(nn.Module)
1.构造类方法1
定义 ResNet50 模型
class ResNet50(nn.Module):
def __init__(self, num_classes=1000):
super(ResNet50, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(64, 3)
self.layer2 = self._make_layer(128, 4, stride=2)
self.layer3 = self._make_layer(256, 6, stride=2)
self.layer4 = self._make_layer(512, 3, stride=2)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512 * 4, num_classes)
def _make_layer(self, out_channels, blocks, stride=1):
downsample = None
if stride != 1 or 64 != out_channels * 4:
downsample = nn.Sequential(
nn.Conv2d(64, out_channels * 4, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels * 4)
)
layers = []
layers.append(ResidualBlock(64, out_channels, stride, downsample))
for i in range(1, blocks):
layers.append(ResidualBlock(out_channels * 4, out_channels))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)