【目标检测论文解读复现NO.33】改进YOLOv5的新能源电池集流盘缺陷检测方法
前言
此前出了目标改进算法专栏,但是对于应用于什么场景,需要什么改进方法对应与自己的应用场景有效果,并且多少改进点能发什么水平的文章,为解决大家的困惑,此系列文章旨在给大家解读最新目标检测算法论文,帮助大家解答疑惑。解读的系列文章,本人已进行创新点代码复现,有需要的朋友可关注私信我。本文仅对论文代码实现,如果原文章的作者觉得不方便,请联系删除,尊重每一位论文作者。
一、摘要
针对新能源汽车电池集流盘中因目标缺陷分布杂乱、尺寸跨度大和特征模糊而易出现误检、漏检的问题,提出一种基于多尺度可变形卷积的YOLOv5方法(YOLOv5s-4Scale-DCN),以用于汽车电池集流盘缺陷检测。首先,针对不同尺度的缺陷目标,在YOLOv5模型的基础上新增检测层,通过捕获不同尺度缺陷的特征以及融合不同深度的语义特征,提高对不同尺度缺陷目标的检测率;其次,引入可变形卷积,扩大特征图的感受野,使提取的特征辨析力更强,有效地提高了模型的缺陷识别能力。实验结果表明,所提的YOLOv5s-4Scale-DCN算法可以有效检测新能源汽车电池集流盘缺陷,m AP达到了91%,相较原算法提高了2.5%,FPS达到了113.6,重度不良和无盖缺陷这两种类别的缺陷,检测召回率达到了100%,满足新能源汽车电池集流盘缺陷实时检测要求。
二、网络模型及核心创新点

1.新增检测层
2.引入可形变卷积
```
第二步:定义yaml网络结构文件。
```python
# YOLOv5 by Ultralytics, GPL-3.0 license
# Parameters
nc: 4 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, DCNConv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
```三、应用数据集(模型构建过程)
本文实验所用的数据集为自行构建,使用从生产线上收集的真实磷酸铁锂汽车电池集流盘缺陷数据,由高分辨率巴斯勒工业相机在光线良好的室内环境下进行拍摄采集。原始图像分辨率为2448×2048,在预处理阶段通过Python以电极孔为中心对原始图像进行裁剪,去除无关背景,保留有用信息,截取之后的图像分辨率为1250×1200。使用Lableme数据标注工具对图片进行标注,标注后自动生成JSON格式的文件,文件名与图片名始终保持一致。
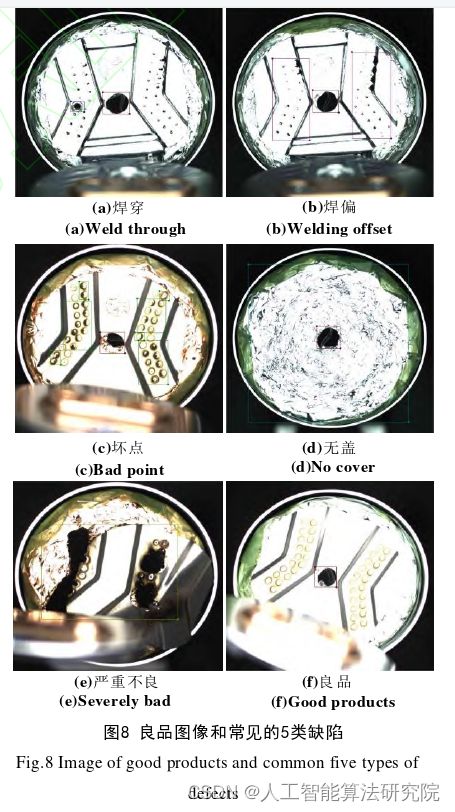
图8为良品图像和常见的5种新能源汽车电池集流盘缺陷类型:焊穿(Weld through)、焊偏(Welding offset)、无盖(No cover)、坏点(Bad point)、重度不良(Severely bad)。
四、实验效果(部分展示)
为了评估算法性能,我们将本文提出的YOLOv5s-4Scale-DCN改进算法与YOLOv5s、YOLOv5l、YOLOv5m、YOLOv5n、YOLOv5x、YOLOv7、YOLOv tiny、YOLOv7x、Faster R-CNN[26]和SSD[27]10种经典算法在自制据集上进行检测性能比较,所有实验均在相同参数设置下进行。

实验结果如表4所示,由表4可知,改进后的算法,mAP达到了91.0%,FPS达到了113.6,相比其他算法综合效果最佳。
五、实验结论
综上所述,改进后的YOLOv5s-4Scale-DCN算法漏检率低、误检率低、识别精度高、检测速度快,综合性能更强,有效降低了误检率、漏检率。
六、投稿期刊介绍

注:论文原文出自 陈彦蓉,高刃,吴文欢,唐海,袁磊.改进YOLOv5的新能源电池集流盘缺陷检测方法[J/OL].电子测量与仪器学报.
https://kns.cnki.net/kcms/detail/11.2488.TN.20230307.1403.010.html
解读的系列文章,本人已进行创新点代码复现。