STM32实战项目-状态机函数应用
前言:
本章主要介绍一下,状态机在工程中的应用,下面我会通过这种方式点亮LED灯,来演示他的妙用。
目录
1、状态机应用
1.1流水灯函数
1.1.1led.h
1.1.2led.c
1.2状态机函数
1.2.1定义举常量
1.2.2结构体封装
1、状态机应用
有限状态机是一种概念思想,把复杂的控制逻辑分解成有限个稳定状态,组成闭环系统,通过事件触发,让状态机按设定的顺序处理事务;
单片机C语言的状态机编程,是利用条件选择语句(switch -- case)切换状态,通过函数内部指令改变状态机状态,让程序按设定的顺序执行。
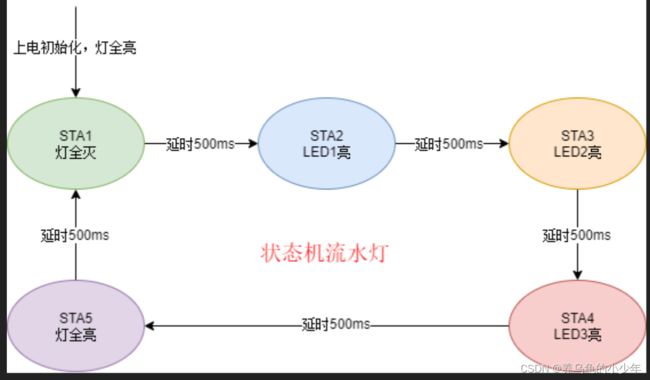
如上图所示:五个状态分别对应五个流程分别对应五种状态,我们可以使用结构体封装,保存五个状态的函数的指针。
1.1流水灯函数
为了方便程序移植,阅读,我们自己定义源文件 LED.C和头文件LED.H头文件中放,流水灯函数的声明和定义,源文件中放函数的实现。
1.1.1led.h
/¶¨Òåö¾ÙÀàÐÍ
typedef enum
{
LED1 = (uint8_t)0x01,
LED2 = (uint8_t)0x02,
LED3 = (uint8_t)0x03,
}LED_Num_t;
//¶¨Òå½á¹¹ÌåÀàÐÍ
typedef struct
{
void (*LED_ON)(uint8_t); //´ò¿ª
void (*LED_OFF)(uint8_t); //¹Ø±Õ
void (*LED_Flip)(uint8_t); //·×ª
} LED_t;
/* extern variables-----------------------------------------------------------*/
extern LED_t LED;1.1.2led.c
static void LED_ON(uint8_t);
static void LED_OFF(uint8_t);
static void LED_Flip(uint8_t);
/* Public variables-----------------------------------------------------------*/
LED_t LED =
{
LED_ON,
LED_OFF,
LED_Flip
};
static void LED_ON(uint8_t LED_Num)
{
//Ìõ¼þÑ¡ÔñÓï¾ä
switch(LED_Num)
{
case LED1: HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin,GPIO_PIN_SET); break;
case LED2: HAL_GPIO_WritePin(LED2_GPIO_Port,LED2_Pin,GPIO_PIN_SET); break;
case LED3: HAL_GPIO_WritePin(LED3_GPIO_Port,LED3_Pin,GPIO_PIN_SET); break;
default: System.Assert_Failed();
}
}
static void LED_OFF(uint8_t LED_Num)
{
//Ìõ¼þÑ¡ÔñÓï¾ä
switch(LED_Num)
{
case LED1: HAL_GPIO_WritePin(LED1_GPIO_Port,LED1_Pin,GPIO_PIN_RESET); break;
case LED2: HAL_GPIO_WritePin(LED2_GPIO_Port,LED2_Pin,GPIO_PIN_RESET); break;
case LED3: HAL_GPIO_WritePin(LED3_GPIO_Port,LED3_Pin,GPIO_PIN_RESET); break;
default: System.Assert_Failed();
}
}
static void LED_Flip(uint8_t LED_Num)
{
//Ìõ¼þÑ¡ÔñÓï¾ä
switch(LED_Num)
{
case LED1: HAL_GPIO_TogglePin(LED1_GPIO_Port,LED1_Pin); break;
case LED2: HAL_GPIO_TogglePin(LED2_GPIO_Port,LED2_Pin); break;
case LED3: HAL_GPIO_TogglePin(LED3_GPIO_Port,LED3_Pin); break;
default: System.Assert_Failed();
}
}我们可以看到在led.c函数中,我们封装的三个函数指针分别实现了,led的开、关、和翻转,至于ON,OFF,TogglePin 这些都是HAL库自己定义的我们可以看看他的函数实现,如下图所示:
至于端口和引脚,这个在我们使用cubemax的时候,配置好参数的时候,已经自动初始化完成了。
1.2状态机函数
1.2.1定义举常量
首先定义五个枚举常量,不同常量对应不同选择,也就会有不同的状态。
//¶¨Òåö¾ÙÀàÐÍ
typedef enum
{
STA1 = (uint8_t)0x01,
STA2 = (uint8_t)0x02,
STA3 = (uint8_t)0x03,
STA4 = (uint8_t)0x04,
STA5 = (uint8_t)0x05,
} STA_Machine_Status_t;
1.2.2结构体封装
使用结构体封装五个函数指针,方便在运行函数中进行调用,具体代码如下:
//¶¨Òå½á¹¹ÌåÀàÐÍ
typedef struct
{
STA_Machine_Status_t ucSTA_Machine_Status; //״̬»ú״̬
void (*Fun_STA1)(void);
void (*Fun_STA2)(void);
void (*Fun_STA3)(void);
void (*Fun_STA4)(void);
void (*Fun_STA5)(void);
} STA_Machine_t;这五个函数指针指向五个函数,分别实现led的亮灭,所以函数内部又调用了led的函数,具体代码如下:
void Fun_STA1()
{
HAL_Delay(500); //ÑÓʱ500ms
LED.LED_Flip(LED1); //·×ªLED1,ÃðµÆ
LED.LED_Flip(LED2); //·×ªLED2,ÃðµÆ
LED.LED_Flip(LED3); //·×ªLED3,ÃðµÆ
//״̬»úÇл»ÖÁ״̬2
STA_Machine.ucSTA_Machine_Status = STA2;
}
void Fun_STA2()
{
HAL_Delay(500); //ÑÓʱ500ms
LED.LED_ON(LED1); //LED1ÁÁµÆ
LED.LED_OFF(LED2); //LED2ÃðµÆ
LED.LED_OFF(LED3); //LED3ÃðµÆ
//״̬»úÇл»ÖÁ״̬3
STA_Machine.ucSTA_Machine_Status = STA3;
}
void Fun_STA3()
{
HAL_Delay(500); //ÑÓʱ500ms
LED.LED_OFF(LED1); //LED1ÃðµÆ
LED.LED_ON(LED2); //LED2ÁÁµÆ
LED.LED_OFF(LED3); //LED3ÃðµÆ
//״̬»úÇл»ÖÁ״̬4
STA_Machine.ucSTA_Machine_Status = STA4;
}
void Fun_STA4()
{
HAL_Delay(500); //ÑÓʱ500ms
LED.LED_OFF(LED1); //LED1ÃðµÆ
LED.LED_OFF(LED2); //LED2ÃðµÆ
LED.LED_ON(LED3); //LED3ÁÁµÆ
//״̬»úÇл»ÖÁ״̬5
STA_Machine.ucSTA_Machine_Status = STA5;
}
void Fun_STA5()
{
HAL_Delay(500); //ÑÓʱ500ms
LED.LED_ON(LED1); //LED1ÁÁµÆ
LED.LED_ON(LED2); //LED2ÁÁµÆ
LED.LED_ON(LED3); //LED3ÁÁµÆ
//״̬»úÇл»ÖÁ³õʼ״̬1
STA_Machine.ucSTA_Machine_Status = STA1;
}这样的话一个完整的状态机就完成了,我们软件框架并没有改变,只是将调用的run函数内部进行了修改。整体的框架如下图所示:
