Android 使用Bullet物理引擎
####一、下载bullet
由于我访问不了githubt,所以使用的是国内gitee的,
git clone https://gitee.com/hejuncheng1/bullet3.git
####二、android引入
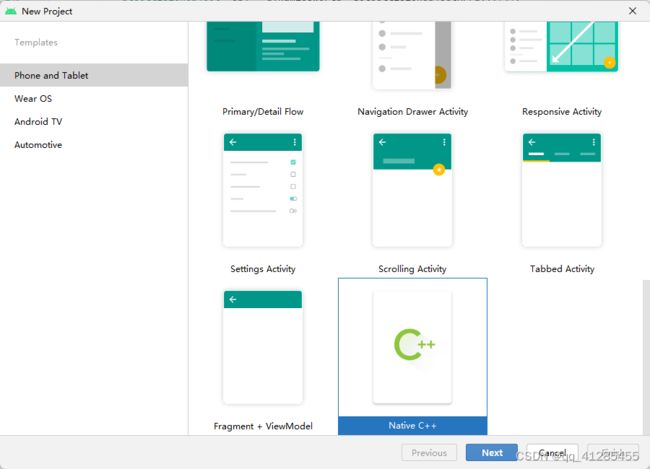
使用android studio创建native c++程序
将下载的bullet的目录里的src和下面的BulletCollision、BulletDynamics、BulletSoftBody、clew、LinearMath目录,以及btBulletCollisionCommon.h和btBulletDynamicsCommon.h文件复制到cpp目录下
这里没有用bullet3和opencl保留了最基本的bullet功能

修改最外层CMakeLists.txt的内容,将bullet的内容编译进anative共享库
# For more information about using CMake with Android Studio, read the
# documentation: https://d.android.com/studio/projects/add-native-code.html
# Sets the minimum version of CMake required to build the native library.
cmake_minimum_required(VERSION 3.8)
# Declares and names the project.
project("anative")
file(GLOB_RECURSE SRC_DIR_LIST "./*.cxx" "./*.c" "./*.cpp")
#自动查找头文件路径函数(没有去重)
macro(FIND_INCLUDE_DIR result curdir) #定义函数,2个参数:存放结果result;指定路径curdir;
file(GLOB_RECURSE children "${curdir}/*.hpp" "${curdir}/*.h" ) #遍历获取{curdir}中*.hpp和*.h文件列表
message(STATUS "children= ${children}") #打印*.hpp和*.h的文件列表
set(dirlist "") #定义dirlist中间变量,并初始化
foreach(child ${children}) #for循环
string(REGEX REPLACE "(.*)/.*" "\\1" LIB_NAME ${child}) #字符串替换,用/前的字符替换/*h
if(IS_DIRECTORY ${LIB_NAME}) #判断是否为路径
LIST(APPEND dirlist ${LIB_NAME}) #将合法的路径加入dirlist变量中
endif() #结束判断
endforeach() #结束for循环
set(${result} ${dirlist}) #dirlist结果放入result变量中
endmacro()
#查找include目录下的所有*.hpp,*.h头文件,并路径列表保存到 INCLUDE_DIR_LIST 变量中
FIND_INCLUDE_DIR(INCLUDE_DIR_LIST ${PROJECT_SOURCE_DIR})
#将INCLUDE_DIR_LIST中路径列表加入工程
include_directories( #INCLUDE_DIR_LIST路径列表加入工程
${INCLUDE_DIR_LIST}
)
ADD_LIBRARY(anative SHARED ${SRC_DIR_LIST})
# Searches for a specified prebuilt library and stores the path as a
find_library( # Sets the name of the path variable.
log-lib
# Specifies the name of the NDK library that
# you want CMake to locate.
log)
target_link_libraries( # Specifies the target library.
anative
# Links the target library to the log library
# included in the NDK.
${log-lib})
修改native-lib.cpp的内容,添加bullet的helloworld程序
#include 运行可以看到输出的效果

三、利用openglES显示出来
添加TriangleRenderJNI类实现了GLSurfaceView.Renderer接口
package com.example.anative;
import android.content.Context;
import android.content.res.AssetManager;
import android.opengl.GLSurfaceView;
import android.util.Log;
import javax.microedition.khronos.egl.EGLConfig;
import javax.microedition.khronos.opengles.GL10;
public class TriangleRenderJNI implements GLSurfaceView.Renderer {
static {
System.loadLibrary("anative");
}
public TriangleRenderJNI(Context context){
mAssetMgr = context.getAssets();
if (null == mAssetMgr){
Log.e("TAG", "TriangleRenderJNI: " + "getAssets return null !");
}
}
private AssetManager mAssetMgr = null;
public native void glesInit();
public native void glesRender();
public native void glesResize(int width,int height);
public native void readShaderFile(AssetManager assetManager);
@Override
public void onSurfaceCreated(GL10 gl, EGLConfig config) {
readShaderFile(mAssetMgr);
glesInit();
}
@Override
public void onSurfaceChanged(GL10 gl, int width, int height) {
glesResize(width,height);
}
@Override
public void onDrawFrame(GL10 gl) {
glesRender();
}
}
四个本地方法需要实现
创建一个RenderJNI.cpp,实现这四个本地方法,在里面创建bullet,并用opengles绘制。这里将bullet的HelloWorld程序的一些参数进行修改,改变了物体的大小和碰撞反弹系数
//
// Created by JinTao Liu on 2022/2/4.
//
#include "RenderJNI.h"
#include 修改CMakeLists.txt
##加入
##官方标准配置
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11 -fno-rtti -fno-exceptions -Wall")
##ANDROID_PLATFORM_LEVEL=18
add_definitions("-DDYNAMIC_ES3")
set(OPENGL_LIB GLESv2)
# Declares and names the project.
#修改,添加引用库${OPENGL_LIB} android EGL m
target_link_libraries( # Specifies the target library.
anative
# Links the target library to the log library
# included in the NDK.
${log-lib}
${OPENGL_LIB}
android
EGL
m)
修改MainActivity
package com.example.anative;
import androidx.appcompat.app.AppCompatActivity;
import android.opengl.GLSurfaceView;
import android.os.Bundle;
import android.widget.TextView;
import com.example.anative.databinding.ActivityMainBinding;
public class MainActivity extends AppCompatActivity {
// Used to load the 'anative' library on application startup.
static {
System.loadLibrary("anative");
}
private ActivityMainBinding binding;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
// binding = ActivityMainBinding.inflate(getLayoutInflater());
// setContentView(R.layout.activity_main);
//
// // Example of a call to a native method
// TextView tv = findViewById(R.id.sample_text);
// tv.setOnClickListener(new View.OnClickListener() {
// @Override
// public void onClick(View v) {
// stringFromJNI();
// }
// });
setupViews();
}
private void setupViews() {
GLSurfaceView mGlSurfaceView = new GLSurfaceView(this);
setContentView(mGlSurfaceView);
//设置版本
mGlSurfaceView.setEGLContextClientVersion(2);
GLSurfaceView.Renderer renderer = new TriangleRenderJNI(MainActivity.this);
mGlSurfaceView.setRenderer(renderer);
//只有在绘制数据改变时才会绘制View,可以防止GLSurfaceView帧重绘
//该种模式下当需要重绘时需要我们手动调用glSurfaceView.requestRender();
mGlSurfaceView.setRenderMode(GLSurfaceView.RENDERMODE_CONTINUOUSLY);
}
/**
* A native method that is implemented by the 'bulletopengles' native library,
* which is packaged with this application.
*/
public native String stringFromJNI();
}
最后效果
之前参考了一个opengles 绘制三角形的,链接找不到了。
代码:https://gitee.com/aaaa_sss/native.git