小规模容器编排使用Docker Swarm不香么,用个锤子的kubernetes
文章目录
-
-
- 一、Docker Swarm是什么?
- 二、Swarmkit和Swarm Mode是什么?
- 三、Docker Swarm的核心设计
- 四、Docker Swarm安装部署
-
- 4.1、初始化Swarm节点1
- 4.2、新节点加入Swarm集群
- 4.3、使用swarm部署服务
- 4.4、swarm集群管理
-
一、Docker Swarm是什么?
Docker Swarm是一款由Docker官方推出的容器编排工具,其主要作用是把若干台Docker 主机抽象为一个整体,并且通过一个入口统一管理这些Docker 主机上的各种Docker 资源,用于管理和编排多个Docker容器的集群。
它可以让用户方便地管理多个Docker节点,以及部署和扩展应用程序。Docker Swarm通过提供集群管理、负载均衡、服务发现和滚动更新等功能,简化了分布式应用程序的开发和部署过程。
有人会有疑问,kubernetes现在已经是容器编排领域的王者了,还有Docker Swarm什么事情?其实不然,根据我的个人经验以及和同行的交流来看,kubernetes功能非常强大,但是也非常复杂, 部署和运维过程不是都需要有不少的工作,需要有专门的团队专家维护,属于比较“重”的。而相对来说Docker Swarm则比较轻量级,维护相对简单,对于一些中小企业来说,不需要投入过多的成本,也是一个非常好的选择。
还是老话:适合的才是最好的。
二、Swarmkit和Swarm Mode是什么?
Docker容器编排的功能经历了好几代,分别是Docker Swarm、Swarmkit和Swarm Mode。苍天啊,我也有点服了,整这么几个相近的名字,确实让初学者头疼凌乱。
Docker Swarm是Docker容器编排最初提供的功能,它独立于Docker Engine之外,使用Docker CLI进行管理,需要部署额外的KV存储,从Docker 1.6开始就有了,为了方便,我们姑且称之为Docker Swarm V1吧。
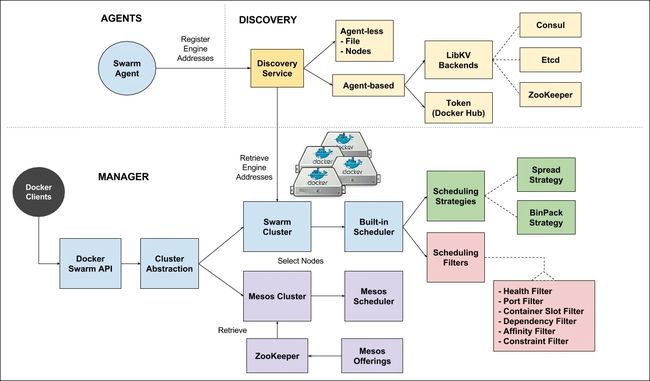
Docker Swarm V1由Discovery Service模块、Scheduler模块和Leadership模块组成。如下图所示,Discovery Service主要用于发现Swarm集群重的节点;Scheduler则主要负责给用户新创建的容器分配最优的节点,支持多种策略;Leadership则是提供了Swarm HA的功能。
目前来说Docker Swarm项目已经沉寂,不太建议新项目使用。
Docker 发展到1.12版本的时候,Docker官方又发布了一个项目称为Docker Swarmkit,它也是一个独立的容器编排项目,目前在github上开源,有2K Star,还在更新。Swarmkit有自己独立的CLI管理工具,容器编排和调度能力更强,支持节点发现,实现了Raft共识选主和安全访问,是一个比较完善的容器编排项目。为了方便,我们且称之为Docker Swarm V2。

运行SwarmKit的多台机器可以组合在一起形成Swarm集群,相互协调任务。一旦一台机器加入,它就自动成为一个Swarm 节点,而这个节点可以是工作节点或管理节点。它使用独立的CLI swarmd和swarmctl,swarmd部署在cluster中的每一个node上,彼此间互相通信,组成cluster;而swarmctl则用来控制整个集群。
例如使用swarmd初始化节点:
$ swarmd -d /tmp/node-1 --listen-control-api /tmp/node-1/swarm.sock --hostname node-1
例如使用swarmctl列出正在运行的服务:
$ swarmctl service ls
ID Name Image Replicas
-- ---- ----- --------
08ecg7vc7cbf9k57qs722n2le redis redis:3.0.5 1/1
最后终于轮到了主角Swarm Mode,其实就是现在Docker官方建议使用的Docker容器编排模式,它的底层还是基于Swarmkit构建的,但是它将swarm的能力集成到了Docker Engine中,你只需要部署Docker Engine就自动获得了容器编排的能力,不需要额外的存储,使用Docker CLI,不需要额外的CLI工具,支持服务发现、滚动升级、负载均衡、路由和容器的扩缩容、安全通信等功能,算是非常完善且方便的。
swarm集群中所有的节点都是对等的,分为两个角色:manager和worker,manager服务集群的管理,worker负责容器的运行,两个角色可以相互转换,极为方便。目前推荐docker的容器编排使用swarm mode。
三、Docker Swarm的核心设计
我们再来仔细说说docker swarm(从这里开始指的都是swarm mode)的核心设计思想。
首先swarm的功能内嵌在了Docker Engine上,这样子一来除了Docker Engine无需再额外安装其他软件,相对于独立组件更加轻便。
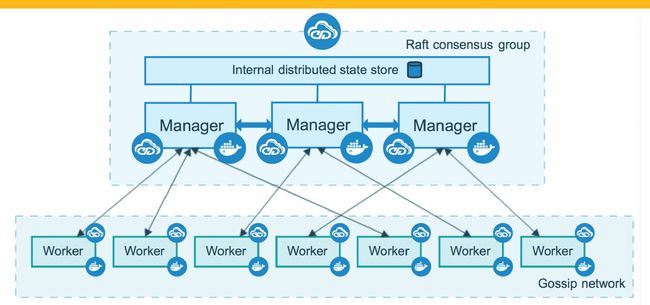
swarm集群支持多个Manager,Manager之间通过raft协议实现高可用。它针对服务进行了抽象设计,抽象出了Service、Task和Container概念,如下图所示
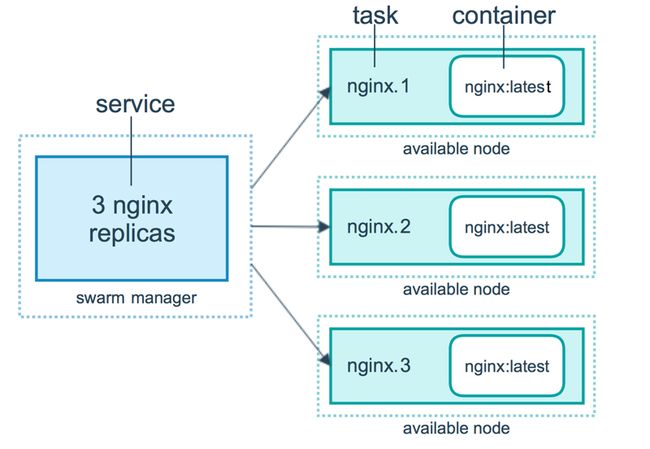
Service代表一个作业,而Task则是swarm内调度的最小单位,每个task一般只调用一个Container,例如你指定了一个服务要运行三个实例,则会启动三个Task,每个Task负责运行一个Container实例。
在swarm中有两种不同的Service模式:
- Replicated services(副本模式)
副本模式下,在定义service的时候指定任务的数量,一般也就是container实例的数量,集群会按照指定的数量运行任务。 - global services(全局模式)
在每个节点上运行一个相同的任务,但是不预先指定任务数量,而是每增加一个节点到 swarm 中,协调器就新建一个任务,然后调度器把任务分配给新节点。
而对于Task,整个生命周期具有不同的状态,可以监控到任务执行的情况,Task生命周期状态有:
NEW 任务在初始化状态
PENDING 正在分配任务所用的资源
ASSIGNED Docker分配任务给节点
ACCEPTED 任务被工作节点接受。如果工作节点拒接任务,状态将会转变成REJECTED
PREPARING Docker正在准备任务
STARTING Docker正在开启任务
RUNNING 任务正在执行
COMPLETE 任务结束,不带错误代码
FAILED 任务结束,带着错误代码
SHUTDOWN Docker请求任务关闭
REJECTED 工作节点拒绝任务
ORPHANED 节点宕机时间太长
REMOVE 该任务不是终端,但相关服务已被删除或缩小
一般的swarm使用流程为:用户在Docker Swarm上定义一个服务,包括服务名称、容器镜像、容器数量等信息,Docker Swarm manager会将服务的定义发送给集群中的所有Worker节点,每个Worker节点会启动指定数量的容器,并将容器注册到Swarm中,而Swarm会通过内置的负载均衡算法将请求分发到各个容器中,当用户需要更新容器时,只需更新服务定义,Swarm会自动将容器更新到最新版本。
四、Docker Swarm安装部署
由于Docker Swarm已经集成到了Docker Engine中,所以只要安装了Docker就可以通过以下步骤进行swarm集群的部署。
为了进行实验,我本地搭建了两个虚拟机:node1(192.168.56.11)和node2(192.168.56.12)。
4.1、初始化Swarm节点1
首先,选择一个节点作为manager节点,对swarm进群进行初始化,我这里选择node1,使用以下命令:
[docker@node1 ~]$ docker swarm init
结果如下:
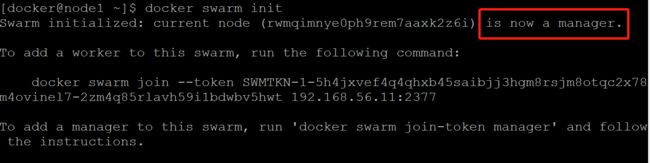
可以看到这个节点已经成为了一个manager节点,且提示了如何加入新的manager节点和worker节点。
4.2、新节点加入Swarm集群
使用docker swarm join --token 命令可以作为worker节点加入集群。
[docker@node2 ~]$ docker swarm join --token SWMTKN-1-5h4jxvef4q4qhxb45saibjj3hgm8rsjm8otqc2x78m4ovinel7-2zm4q85rlavh59i1bdwbv5hwt 192.168.56.11:2377
正常情况下如下会提示作为worker节点加入成功。

4.3、使用swarm部署服务
使用docker service create --name 命令可以创建service,在docker swarm中使用docker service进行服务部署和管理。
我们这里使用busybox镜像进行容器部署,首先拉去镜像到本地,并使用docker images查看确认镜像。
[docker@node1 ~]$ docker pull busybox:latest
[docker@node1 ~]$ docker images
创建service
[docker@node1 ~]$ docker service create --name helloworld busybox:latest sh -c "while true; do echo Hello; sleep 2; done"

查询service
[docker@node1 ~]$ docker service ls
ID NAME MODE REPLICAS IMAGE PORTS
j1mtev8f7k05 helloworld replicated 1/1 busybox:latest
可以看到服务ID以及副本的数量。
查看service详细信息
使用命令docker service inspect 可以查看service的详细信息,如下命令,可以看到输出内容信息非常丰富,包括service的定义等。
[docker@node1 ~]$ docker service inspect helloworld

扩展service
使用命令docker service scale
[docker@node1 ~]$ docker service scale helloworld=2
再次使用docker service ls可以看到副本数量已经提升到了2。

更新service
可以使用docker service update --image 更新service的定义,包括容器镜像和数量等信息,service将会被自动重新部署。
[docker@node1 ~]$ docker service update --image nginx:latest helloworld
重新查看service,可以发现image已经更换为了nginx:latest。
删除service
使用命令docker service rm 或者docker service rm
[docker@node1 ~]$ docker service rm helloworld
4.4、swarm集群管理
docker swarm还提供了一些命令用于swarm集群节点本身的管理,例如
-
查看 Swarm 集群节点:
[docker@node1 ~]$ docker node ls -
从 Swarm 集群中删除一个节点:
[docker@node1 ~]$ docker node rm <node-id> -
增加一个新的manager节点
在当前manager节点上执行命令
docker swarm join-token manager,此时会输出以下内容:docker swarm join --token SWMTKN-1-5h4jxvef4q4qhxb45saibjj3hgm8rsjm8otqc2x78m4ovinel7-3mxnl9pluz287gdo6ggefbr0r 192.168.56.11:2377在新节点上执行此命令,即可轻松添加一个新的manager节点。
通过以上,总结一下,docker swarm集群无论是部署和维护都是相对简单的,而容器的编排功能却一点也不弱,满足中小公司和团队的容器编排部署需要一点问题也没有,相对于kubernetes的部署和维护流程,能够节省大量的投入,所以kubernetes适合大规模的容器编排,小规模的老老实实选择docker swarm轻轻松松不香么~