备赛电赛学习STM32(十二):USART串口进阶
一、USART串口数据包
1.1、两种类型的数据包
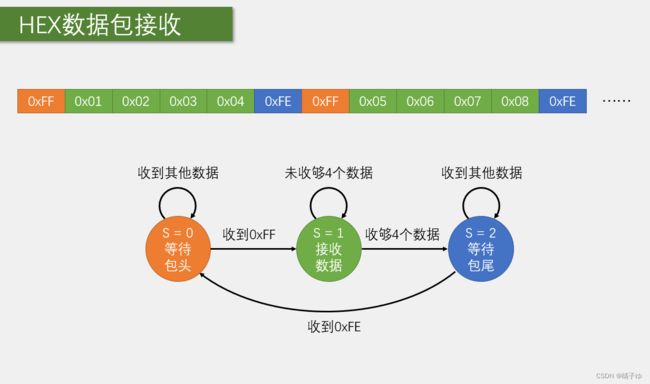
1.1.1、HEX数据包

- 数据包的作用:把一个个单独的数据打包起来,方便我们进行多字节的数据通信
- 分割和打包的方法,可以自己设计,比如在XYZXYZ的数据流中,数据包的第一个数据,也就是X的数据包,它的最高位置1,其余数据包最高位置0,当我接收到数据时判断一下最高位,如果是1,那就是X数据然后紧跟的是Y和Z(这种方法不推荐,因为破坏了原有数据,使用起来比较复杂)
- 串口数据包一般是额外添加包头和包尾,例如上图中的固定包长含包头包尾以及可变包长含包头包尾,数据包的结构可以自己规定也可以是买到的模块的卖家规定的
1.1.2、文本数据包

- 文本数据包和HEX数据包分别对应了文本模式和HEX两种模式
- 在HEX数据包里面,数据都是以原始字节数据本身呈现的,而在文本数据包里面,每个字节都经过一层编码和译码
- 同样有固定包长和可变包长两种形式,通常以换行作为包尾
1.1.3、HEX数据包和文本数据包对比
- HEX数据包优点:传输直接,解析数据简单,比较适合一些模块发送原始的数据,比如使用串口通信的陀螺仪、温湿度传感器,
- HEX数据包缺点:灵活性不足,载荷和包头包尾容易重复
- 文本数据包优点:数据直观易理解,非常灵活,比较适合一些输入指令进行人机交互的场合
- 文本数据包缺点:解析效率低
1.2、数据包的相关问题
1.2.1、包头包尾和数据载荷重复的问题
对于数据和包头包尾重复可能引起误判,有以下几种解决方法:
- 限制载荷数据的范围。如果可以,我们可以限制数据的范围,使发送数据的最大可能值达不到包头包尾的数值。
- 使用固定长度的数据包。这样我们只要通过包头包尾对齐了数据,我们就可以清楚的知道哪个数据是包头包尾,哪个数据是载荷数据。
- 增加包头包尾的数量,并且让它呈现出载荷数据出现不了状态。比如我们使用FF、FE作为包头,FD、FC作为包尾
1.2.2、包头包尾是否需要的问题
并不是所有情况我们都需要包头和包尾,比如我们可以只要一个包头,把包尾删掉,这样数据格式就是一个包头+4个数据,当监测到FF开始接收,收够4个字节置标志位,一个数据包接收完成(这样,载荷和宝投诉重复的问题会严重一些)
1.2.3、固定包长和可变包长的选择问题
对于HEX数据包来说,如果你的载荷会出现和包头包尾重复的情况,那就最好选择固定包长,这样可以避免接受错误。
如果载荷和包头包尾不会重复,那选可变包长
1.2.4、各种数据转换为字节流的问题
这里数据包都是一个字节一个字节组成的,如果你想发送16位的整型数据、32位的整型数据、float、double、甚至是结构体,其实都没问题,因为它们内部其实都是由一个字节一个字节组成的,只需要用一个uint8_t的指针指向它,把它们当成一个字节数组发送就行了
1.3、数据包的接收流程
1.3.1、HEX接收
1.3.2、文本接收

二、实例部分
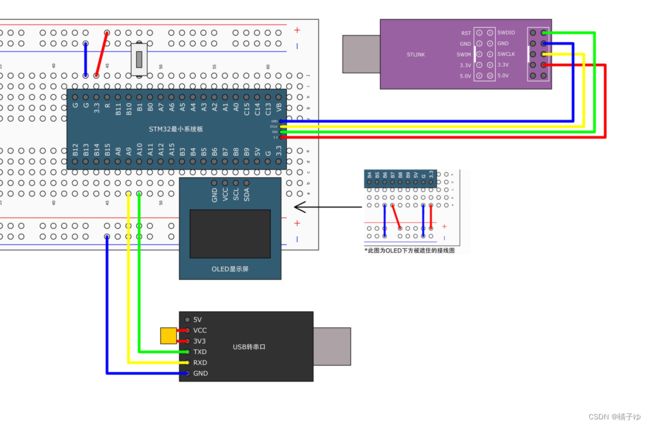
2.1、串口收发HEX数据包
2.1.1、接线图
2.1.2、代码部分
- serial.h
#ifndef __SERIAL_H
#define __SERIAL_H
#include
extern uint8_t Serial_TxPacket[];
extern uint8_t Serial_RxPacket[];
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
void Serial_SendPacket(void);
uint8_t Serial_GetRxFlag(void);
#endif
- serial.c
#include "stm32f10x.h" // Device header
#include
#include
uint8_t Serial_TxPacket[4]; //FF 01 02 03 04 FE
uint8_t Serial_RxPacket[4];
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
void Serial_SendPacket(void)
{
Serial_SendByte(0xFF);
Serial_SendArray(Serial_TxPacket, 4);
Serial_SendByte(0xFE);
}
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0;
static uint8_t pRxPacket = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
uint8_t RxData = USART_ReceiveData(USART1);
if (RxState == 0)
{
if (RxData == 0xFF)
{
RxState = 1;
pRxPacket = 0;
}
}
else if (RxState == 1)
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket ++;
if (pRxPacket >= 4)
{
RxState = 2;
}
}
else if (RxState == 2)
{
if (RxData == 0xFE)
{
RxState = 0;
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
- main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "Key.h"
uint8_t KeyNum;
int main(void)
{
OLED_Init();
Key_Init();
Serial_Init();
OLED_ShowString(1, 1, "TxPacket");
OLED_ShowString(3, 1, "RxPacket");
Serial_TxPacket[0] = 0x01;
Serial_TxPacket[1] = 0x02;
Serial_TxPacket[2] = 0x03;
Serial_TxPacket[3] = 0x04;
while (1)
{
KeyNum = Key_GetNum();
if (KeyNum == 1)
{
Serial_TxPacket[0] ++;
Serial_TxPacket[1] ++;
Serial_TxPacket[2] ++;
Serial_TxPacket[3] ++;
Serial_SendPacket();
OLED_ShowHexNum(2, 1, Serial_TxPacket[0], 2);
OLED_ShowHexNum(2, 4, Serial_TxPacket[1], 2);
OLED_ShowHexNum(2, 7, Serial_TxPacket[2], 2);
OLED_ShowHexNum(2, 10, Serial_TxPacket[3], 2);
}
if (Serial_GetRxFlag() == 1)
{
OLED_ShowHexNum(4, 1, Serial_RxPacket[0], 2);
OLED_ShowHexNum(4, 4, Serial_RxPacket[1], 2);
OLED_ShowHexNum(4, 7, Serial_RxPacket[2], 2);
OLED_ShowHexNum(4, 10, Serial_RxPacket[3], 2);
}
}
}
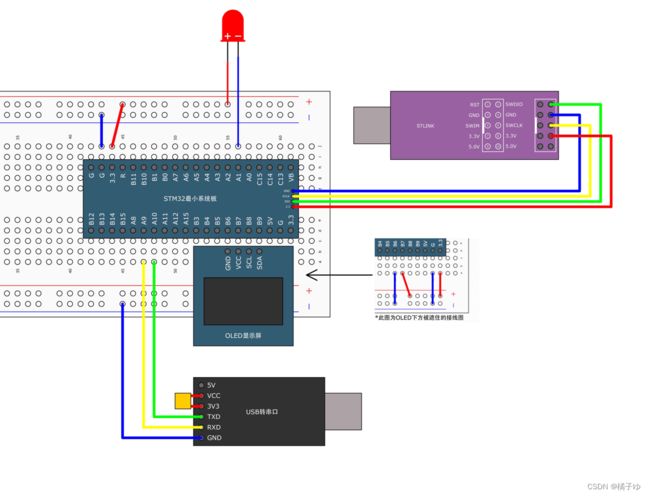
2.2、串口收发文本数据包
2.2.1、接线图
2.2.2、代码部分
- serial.h
#ifndef __SERIAL_H
#define __SERIAL_H
#include
extern char Serial_RxPacket[];
extern uint8_t Serial_RxFlag;
void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);
#endif
- serial.c
#include "stm32f10x.h" // Device header
#include
#include
char Serial_RxPacket[100]; //"@MSG\r\n"
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
void USART1_IRQHandler(void)
{
static uint8_t RxState = 0;
static uint8_t pRxPacket = 0;
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
uint8_t RxData = USART_ReceiveData(USART1);
if (RxState == 0)
{
if (RxData == '@' && Serial_RxFlag == 0)
{
RxState = 1;
pRxPacket = 0;
}
}
else if (RxState == 1)
{
if (RxData == '\r')
{
RxState = 2;
}
else
{
Serial_RxPacket[pRxPacket] = RxData;
pRxPacket ++;
}
}
else if (RxState == 2)
{
if (RxData == '\n')
{
RxState = 0;
Serial_RxPacket[pRxPacket] = '\0';
Serial_RxFlag = 1;
}
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
- main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "LED.h"
#include "string.h"
int main(void)
{
OLED_Init();
LED_Init();
Serial_Init();
OLED_ShowString(1, 1, "TxPacket");
OLED_ShowString(3, 1, "RxPacket");
while (1)
{
if (Serial_RxFlag == 1)
{
OLED_ShowString(4, 1, " ");
OLED_ShowString(4, 1, Serial_RxPacket);
if (strcmp(Serial_RxPacket, "LED_ON") == 0)
{
LED1_ON();
Serial_SendString("LED_ON_OK\r\n");
OLED_ShowString(2, 1, " ");
OLED_ShowString(2, 1, "LED_ON_OK");
}
else if (strcmp(Serial_RxPacket, "LED_OFF") == 0)
{
LED1_OFF();
Serial_SendString("LED_OFF_OK\r\n");
OLED_ShowString(2, 1, " ");
OLED_ShowString(2, 1, "LED_OFF_OK");
}
else
{
Serial_SendString("ERROR_COMMAND\r\n");
OLED_ShowString(2, 1, " ");
OLED_ShowString(2, 1, "ERROR_COMMAND");
}
Serial_RxFlag = 0;
}
}
}